Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchically Accelerated Coverage Path Planning for Redundant Manipulators
Paper and Code
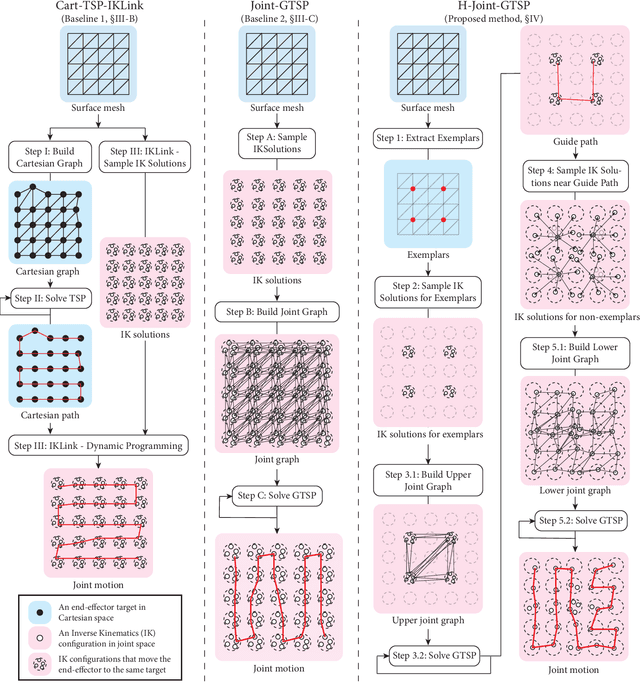
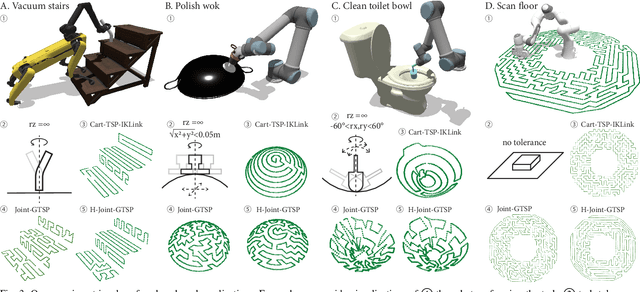
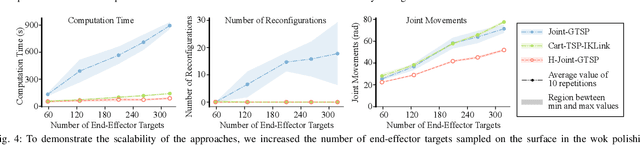
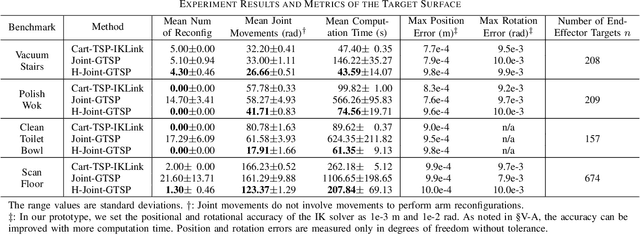
Many robotic applications, such as sanding, polishing, wiping and sensor scanning, require a manipulator to dexterously cover a surface using its end-effector. In this paper, we provide an efficient and effective coverage path planning approach that leverages a manipulator's redundancy and task tolerances to minimize costs in joint space. We formulate the problem as a Generalized Traveling Salesman Problem and hierarchically streamline the graph size. Our strategy is to identify guide paths that roughly cover the surface and accelerate the computation by solving a sequence of smaller problems. We demonstrate the effectiveness of our method through a simulation experiment and an illustrative demonstration using a physical robot.
* Accepted as a contributed paper at the 2025 IEEE International
Conference on Robotics and Automation (ICRA)
View paper on