 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeware of Validation by Eye: Visual Validation of Linear Trends in Scatterplots
Jul 16, 2024



Visual validation of regression models in scatterplots is a common practice for assessing model quality, yet its efficacy remains unquantified. We conducted two empirical experiments to investigate individuals' ability to visually validate linear regression models (linear trends) and to examine the impact of common visualization designs on validation quality. The first experiment showed that the level of accuracy for visual estimation of slope (i.e., fitting a line to data) is higher than for visual validation of slope (i.e., accepting a shown line). Notably, we found bias toward slopes that are "too steep" in both cases. This lead to novel insights that participants naturally assessed regression with orthogonal distances between the points and the line (i.e., ODR regression) rather than the common vertical distances (OLS regression). In the second experiment, we investigated whether incorporating common designs for regression visualization (error lines, bounding boxes, and confidence intervals) would improve visual validation. Even though error lines reduced validation bias, results failed to show the desired improvements in accuracy for any design. Overall, our findings suggest caution in using visual model validation for linear trends in scatterplots.
Visual Validation versus Visual Estimation: A Study on the Average Value in Scatterplots
Jul 18, 2023



We investigate the ability of individuals to visually validate statistical models in terms of their fit to the data. While visual model estimation has been studied extensively, visual model validation remains under-investigated. It is unknown how well people are able to visually validate models, and how their performance compares to visual and computational estimation. As a starting point, we conducted a study across two populations (crowdsourced and volunteers). Participants had to both visually estimate (i.e, draw) and visually validate (i.e., accept or reject) the frequently studied model of averages. Across both populations, the level of accuracy of the models that were considered valid was lower than the accuracy of the estimated models. We find that participants' validation and estimation were unbiased. Moreover, their natural critical point between accepting and rejecting a given mean value is close to the boundary of its 95% confidence interval, indicating that the visually perceived confidence interval corresponds to a common statistical standard. Our work contributes to the understanding of visual model validation and opens new research opportunities.
Characterizing the Users, Challenges, and Visualization Needs of Knowledge Graphs in Practice
Apr 06, 2023



This study presents insights from interviews with nineteen Knowledge Graph (KG) practitioners who work in both enterprise and academic settings on a wide variety of use cases. Through this study, we identify critical challenges experienced by KG practitioners when creating, exploring, and analyzing KGs that could be alleviated through visualization design. Our findings reveal three major personas among KG practitioners - KG Builders, Analysts, and Consumers - each of whom have their own distinct expertise and needs. We discover that KG Builders would benefit from schema enforcers, while KG Analysts need customizable query builders that provide interim query results. For KG Consumers, we identify a lack of efficacy for node-link diagrams, and the need for tailored domain-specific visualizations to promote KG adoption and comprehension. Lastly, we find that implementing KGs effectively in practice requires both technical and social solutions that are not addressed with current tools, technologies, and collaborative workflows. From the analysis of our interviews, we distill several visualization research directions to improve KG usability, including knowledge cards that balance digestibility and discoverability, timeline views to track temporal changes, interfaces that support organic discovery, and semantic explanations for AI and machine learning predictions.
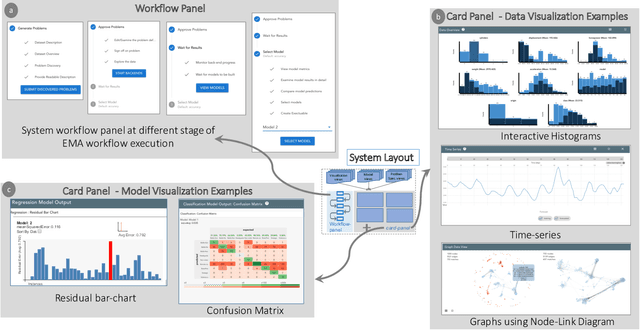
Visualization Guidelines for Model Performance Communication Between Data Scientists and Subject Matter Experts
May 11, 2022
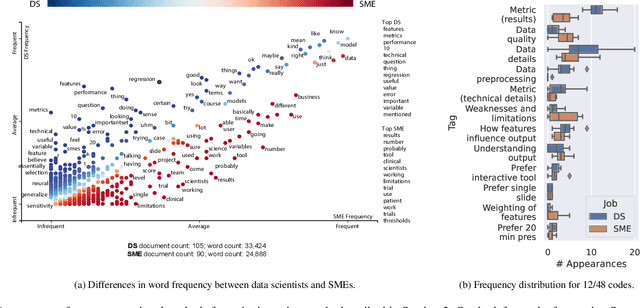


Presenting the complexities of a model's performance is a communication bottleneck that threatens collaborations between data scientists and subject matter experts. Accuracy and error metrics alone fail to tell the whole story of a model - its risks, strengths, and limitations - making it difficult for subject matter experts to feel confident in deciding to use a model. As a result, models may fail in unexpected ways if their weaknesses are not clearly understood. Alternatively, models may go unused, as subject matter experts disregard poorly presented models in favor of familiar, yet arguably substandard methods. In this paper, we propose effective use of visualization as a medium for communication between data scientists and subject matter experts. Our research addresses the gap between common practices in model performance communication and the understanding of subject matter experts and decision makers. We derive a set of communication guidelines and recommended visualizations for communicating model performance based on interviews of both data scientists and subject matter experts at the same organization. We conduct a follow-up study with subject matter experts to evaluate the efficacy of our guidelines in presentations of model performance with and without our recommendations. We find that our proposed guidelines made subject matter experts more aware of the tradeoffs of the presented model. Participants realized that current communication methods left them without a robust understanding of the model's performance, potentially giving them misplaced confidence in the use of the model.
UnProjection: Leveraging Inverse-Projections for Visual Analytics of High-Dimensional Data
Nov 02, 2021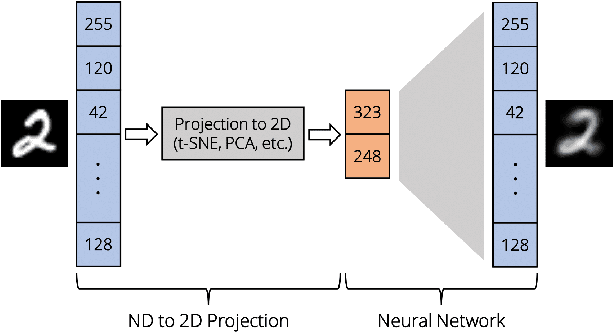
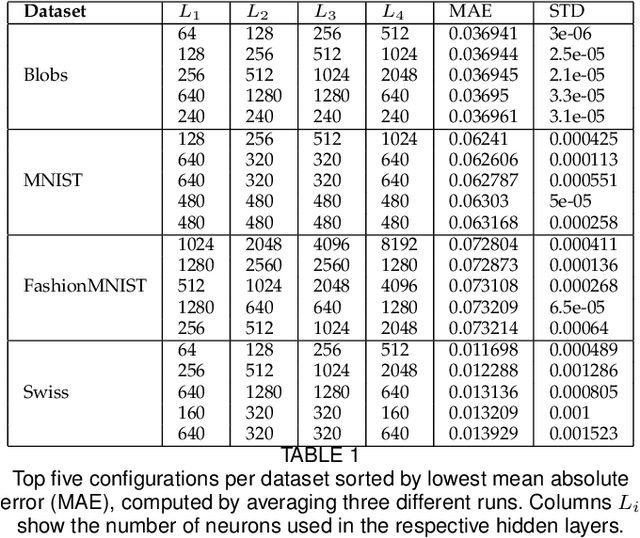

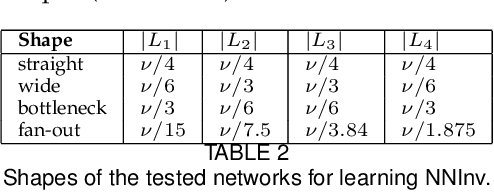
Projection techniques are often used to visualize high-dimensional data, allowing users to better understand the overall structure of multi-dimensional spaces on a 2D screen. Although many such methods exist, comparably little work has been done on generalizable methods of inverse-projection -- the process of mapping the projected points, or more generally, the projection space back to the original high-dimensional space. In this paper we present NNInv, a deep learning technique with the ability to approximate the inverse of any projection or mapping. NNInv learns to reconstruct high-dimensional data from any arbitrary point on a 2D projection space, giving users the ability to interact with the learned high-dimensional representation in a visual analytics system. We provide an analysis of the parameter space of NNInv, and offer guidance in selecting these parameters. We extend validation of the effectiveness of NNInv through a series of quantitative and qualitative analyses. We then demonstrate the method's utility by applying it to three visualization tasks: interactive instance interpolation, classifier agreement, and gradient visualization.
HyperNP: Interactive Visual Exploration of Multidimensional Projection Hyperparameters
Jun 25, 2021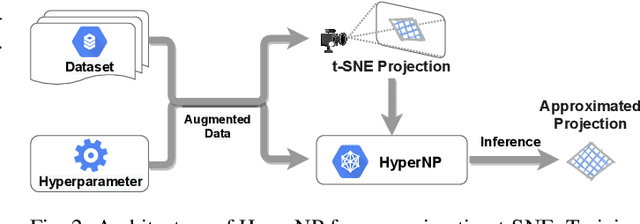

Projection algorithms such as t-SNE or UMAP are useful for the visualization of high dimensional data, but depend on hyperparameters which must be tuned carefully. Unfortunately, iteratively recomputing projections to find the optimal hyperparameter value is computationally intensive and unintuitive due to the stochastic nature of these methods. In this paper we propose HyperNP, a scalable method that allows for real-time interactive hyperparameter exploration of projection methods by training neural network approximations. HyperNP can be trained on a fraction of the total data instances and hyperparameter configurations and can compute projections for new data and hyperparameters at interactive speeds. HyperNP is compact in size and fast to compute, thus allowing it to be embedded in lightweight visualization systems such as web browsers. We evaluate the performance of the HyperNP across three datasets in terms of performance and speed. The results suggest that HyperNP is accurate, scalable, interactive, and appropriate for use in real-world settings.
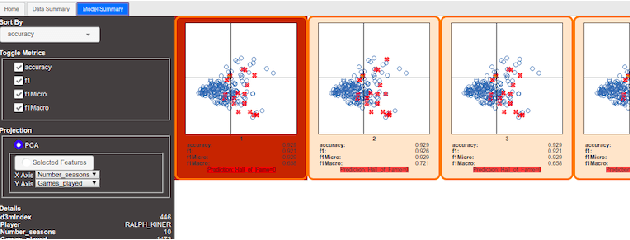
Ablate, Variate, and Contemplate: Visual Analytics for Discovering Neural Architectures
Jul 30, 2019
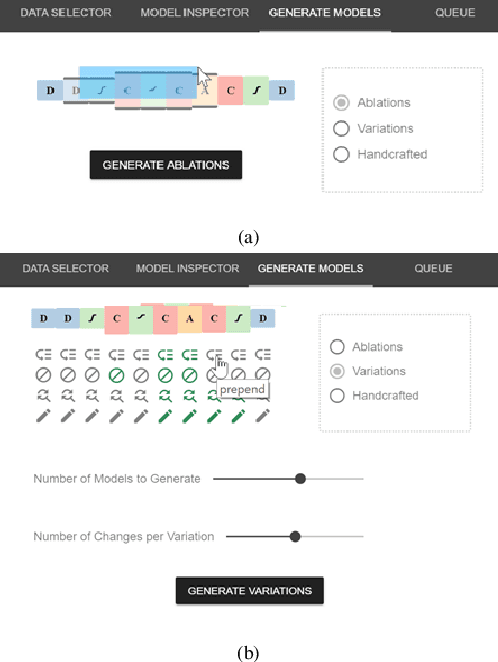
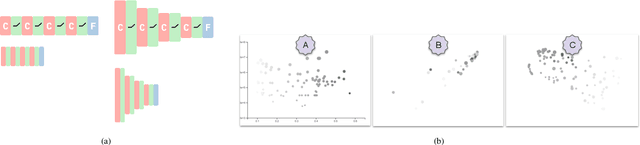
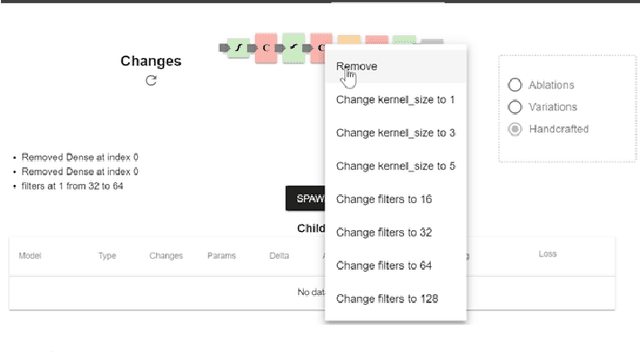
Deep learning models require the configuration of many layers and parameters in order to get good results. However, there are currently few systematic guidelines for how to configure a successful model. This means model builders often have to experiment with different configurations by manually programming different architectures (which is tedious and time consuming) or rely on purely automated approaches to generate and train the architectures (which is expensive). In this paper, we present Rapid Exploration of Model Architectures and Parameters, or REMAP, a visual analytics tool that allows a model builder to discover a deep learning model quickly via exploration and rapid experimentation of neural network architectures. In REMAP, the user explores the large and complex parameter space for neural network architectures using a combination of global inspection and local experimentation. Through a visual overview of a set of models, the user identifies interesting clusters of architectures. Based on their findings, the user can run ablation and variation experiments to identify the effects of adding, removing, or replacing layers in a given architecture and generate new models accordingly. They can also handcraft new models using a simple graphical interface. As a result, a model builder can build deep learning models quickly, efficiently, and without manual programming. We inform the design of REMAP through a design study with four deep learning model builders. Through a use case, we demonstrate that REMAP allows users to discover performant neural network architectures efficiently using visual exploration and user-defined semi-automated searches through the model space.
RNNbow: Visualizing Learning via Backpropagation Gradients in Recurrent Neural Networks
Jul 29, 2019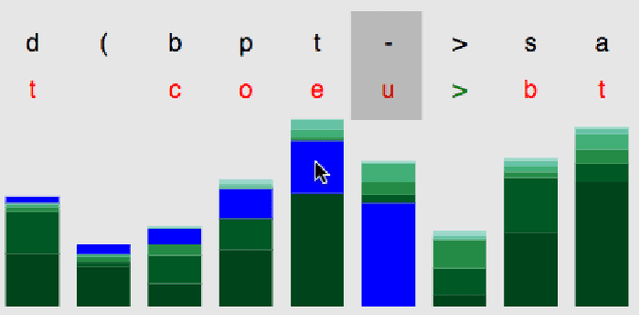
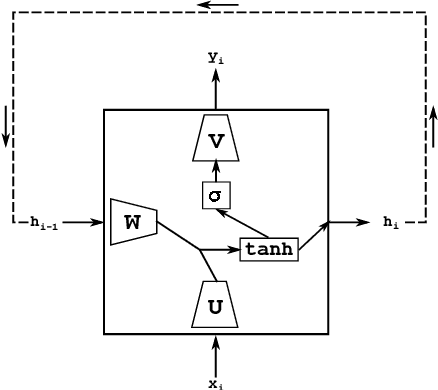
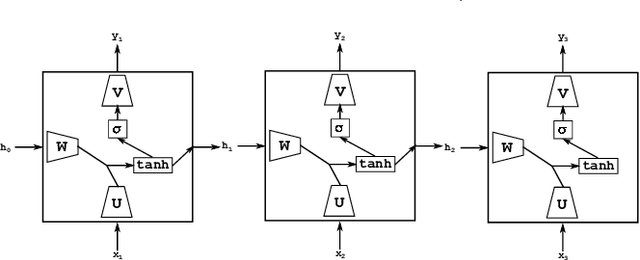
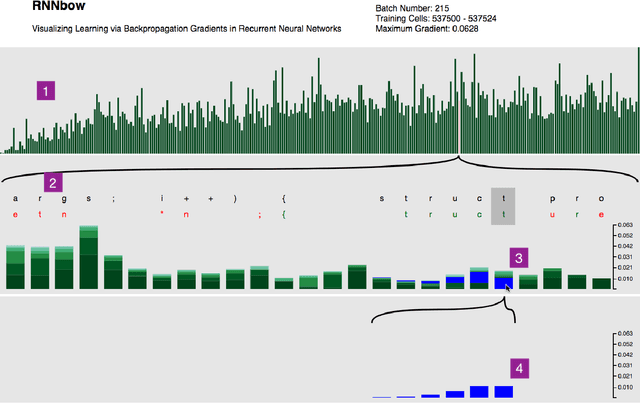
We present RNNbow, an interactive tool for visualizing the gradient flow during backpropagation training in recurrent neural networks. RNNbow is a web application that displays the relative gradient contributions from Recurrent Neural Network (RNN) cells in a neighborhood of an element of a sequence. We describe the calculation of backpropagation through time (BPTT) that keeps track of itemized gradients, or gradient contributions from one element of a sequence to previous elements of a sequence. By visualizing the gradient, as opposed to activations, RNNbow offers insight into how the network is learning. We use it to explore the learning of an RNN that is trained to generate code in the C programming language. We show how it uncovers insights into the vanishing gradient as well as the evolution of training as the RNN works its way through a corpus.
Visual Analytics for Automated Model Discovery
Oct 02, 2018
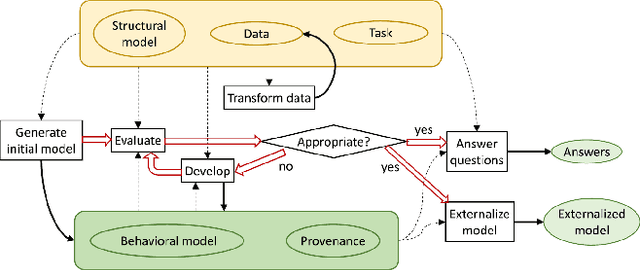
A recent advancement in the machine learning community is the development of automated machine learning (autoML) systems, such as autoWeka or Google's Cloud AutoML, which automate the model selection and tuning process. However, while autoML tools give users access to arbitrarily complex models, they typically return those models with little context or explanation. Visual analytics can be helpful in giving a user of autoML insight into their data, and a more complete understanding of the models discovered by autoML, including differences between multiple models. In this work, we describe how visual analytics for automated model discovery differs from traditional visual analytics for machine learning. First, we propose an architecture based on an extension of existing visual analytics frameworks. Then we describe a prototype system Snowcat, developed according to the presented framework and architecture, that aids users in generating models for a diverse set of data and modeling tasks.