 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMATTERIX: toward a digital twin for robotics-assisted chemistry laboratory automation
Jan 19, 2026Accelerated materials discovery is critical for addressing global challenges. However, developing new laboratory workflows relies heavily on real-world experimental trials, and this can hinder scalability because of the need for numerous physical make-and-test iterations. Here we present MATTERIX, a multiscale, graphics processing unit-accelerated robotic simulation framework designed to create high-fidelity digital twins of chemistry laboratories, thus accelerating workflow development. This multiscale digital twin simulates robotic physical manipulation, powder and liquid dynamics, device functionalities, heat transfer and basic chemical reaction kinetics. This is enabled by integrating realistic physics simulation and photorealistic rendering with a modular graphics processing unit-accelerated semantics engine, which models logical states and continuous behaviors to simulate chemistry workflows across different levels of abstraction. MATTERIX streamlines the creation of digital twin environments through open-source asset libraries and interfaces, while enabling flexible workflow design via hierarchical plan definition and a modular skill library that incorporates learning-based methods. Our approach demonstrates sim-to-real transfer in robotic chemistry setups, reducing reliance on costly real-world experiments and enabling the testing of hypothetical automated workflows in silico. The project website is available at https://accelerationconsortium.github.io/Matterix/ .
AnyPlace: Learning Generalized Object Placement for Robot Manipulation
Feb 06, 2025Object placement in robotic tasks is inherently challenging due to the diversity of object geometries and placement configurations. To address this, we propose AnyPlace, a two-stage method trained entirely on synthetic data, capable of predicting a wide range of feasible placement poses for real-world tasks. Our key insight is that by leveraging a Vision-Language Model (VLM) to identify rough placement locations, we focus only on the relevant regions for local placement, which enables us to train the low-level placement-pose-prediction model to capture diverse placements efficiently. For training, we generate a fully synthetic dataset of randomly generated objects in different placement configurations (insertion, stacking, hanging) and train local placement-prediction models. We conduct extensive evaluations in simulation, demonstrating that our method outperforms baselines in terms of success rate, coverage of possible placement modes, and precision. In real-world experiments, we show how our approach directly transfers models trained purely on synthetic data to the real world, where it successfully performs placements in scenarios where other models struggle -- such as with varying object geometries, diverse placement modes, and achieving high precision for fine placement. More at: https://any-place.github.io.
ORGANA: A Robotic Assistant for Automated Chemistry Experimentation and Characterization
Jan 13, 2024



Chemistry experimentation is often resource- and labor-intensive. Despite the many benefits incurred by the integration of advanced and special-purpose lab equipment, many aspects of experimentation are still manually conducted by chemists, for example, polishing an electrode in electrochemistry experiments. Traditional lab automation infrastructure faces challenges when it comes to flexibly adapting to new chemistry experiments. To address this issue, we propose a human-friendly and flexible robotic system, ORGANA, that automates a diverse set of chemistry experiments. It is capable of interacting with chemists in the lab through natural language, using Large Language Models (LLMs). ORGANA keeps scientists informed by providing timely reports that incorporate statistical analyses. Additionally, it actively engages with users when necessary for disambiguation or troubleshooting. ORGANA can reason over user input to derive experiment goals, and plan long sequences of both high-level tasks and low-level robot actions while using feedback from the visual perception of the environment. It also supports scheduling and parallel execution for experiments that require resource allocation and coordination between multiple robots and experiment stations. We show that ORGANA successfully conducts a diverse set of chemistry experiments, including solubility assessment, pH measurement, recrystallization, and electrochemistry experiments. For the latter, we show that ORGANA robustly executes a long-horizon plan, comprising 19 steps executed in parallel, to characterize the electrochemical properties of quinone derivatives, a class of molecules used in rechargeable flow batteries. Our user study indicates that ORGANA significantly improves many aspects of user experience while reducing their physical workload. More details about ORGANA can be found at https://ac-rad.github.io/organa/.
MVTrans: Multi-View Perception of Transparent Objects
Feb 22, 2023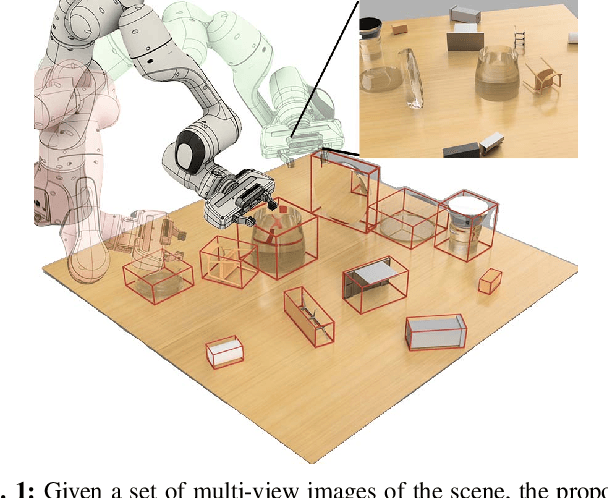
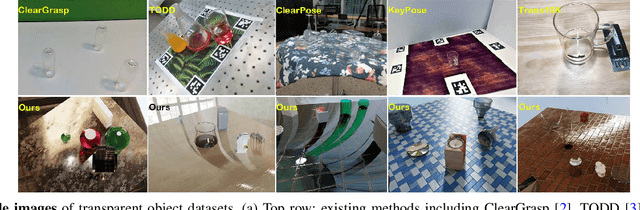
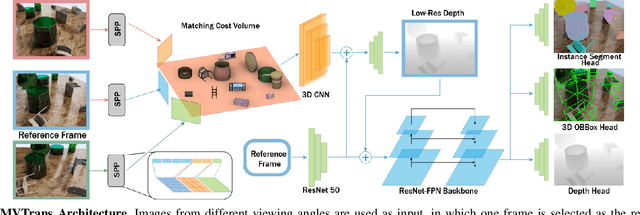
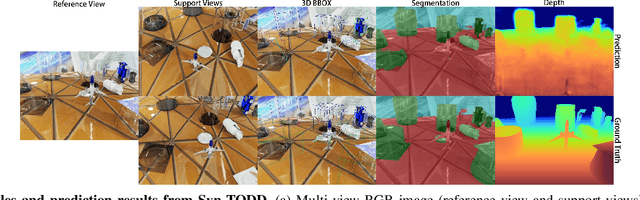
Transparent object perception is a crucial skill for applications such as robot manipulation in household and laboratory settings. Existing methods utilize RGB-D or stereo inputs to handle a subset of perception tasks including depth and pose estimation. However, transparent object perception remains to be an open problem. In this paper, we forgo the unreliable depth map from RGB-D sensors and extend the stereo based method. Our proposed method, MVTrans, is an end-to-end multi-view architecture with multiple perception capabilities, including depth estimation, segmentation, and pose estimation. Additionally, we establish a novel procedural photo-realistic dataset generation pipeline and create a large-scale transparent object detection dataset, Syn-TODD, which is suitable for training networks with all three modalities, RGB-D, stereo and multi-view RGB. Project Site: https://ac-rad.github.io/MVTrans/
An Adaptive Robotics Framework for Chemistry Lab Automation
Dec 19, 2022In the process of materials discovery, chemists currently need to perform many laborious, time-consuming, and often dangerous lab experiments. To accelerate this process, we propose a framework for robots to assist chemists by performing lab experiments autonomously. The solution allows a general-purpose robot to perform diverse chemistry experiments and efficiently make use of available lab tools. Our system can load high-level descriptions of chemistry experiments, perceive a dynamic workspace, and autonomously plan the required actions and motions to perform the given chemistry experiments with common tools found in the existing lab environment. Our architecture uses a modified PDDLStream solver for integrated task and constrained motion planning, which generates plans and motions that are guaranteed to be safe by preventing collisions and spillage. We present a modular framework that can scale to many different experiments, actions, and lab tools. In this work, we demonstrate the utility of our framework on three pouring skills and two foundational chemical experiments for materials synthesis: solubility and recrystallization. More experiments and updated evaluations can be found at https://ac-rad.github.io/arc-icra2023.
Fuse Local and Global Semantics in Representation Learning
Feb 28, 2022
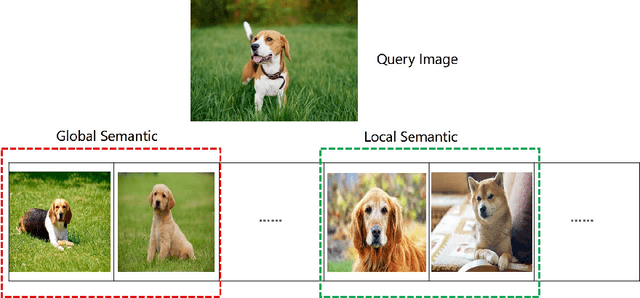
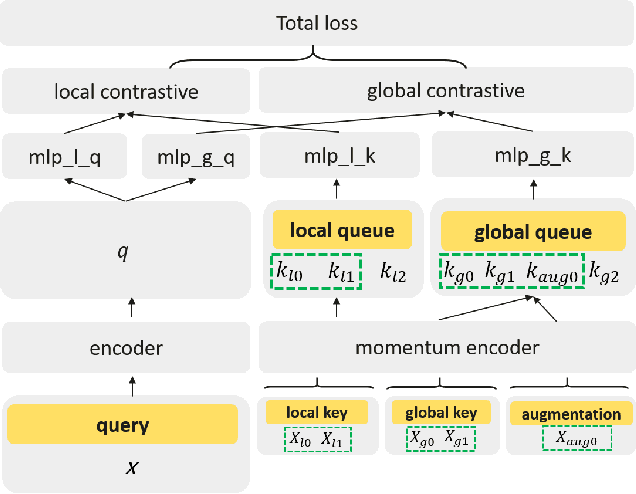
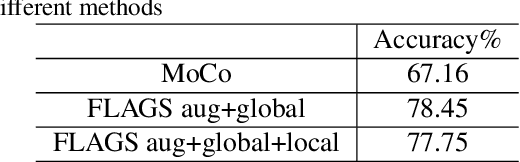
We propose Fuse Local and Global Semantics in Representation Learning (FLAGS) to generate richer representations. FLAGS aims at extract both global and local semantics from images to benefit various downstream tasks. It shows promising results under common linear evaluation protocol. We also conduct detection and segmentation on PASCAL VOC and COCO to show the representations extracted by FLAGS are transferable.