 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJust in time Informed Trees: Manipulability-Aware Asymptotically Optimized Motion Planning
Jan 27, 2026In high-dimensional robotic path planning, traditional sampling-based methods often struggle to efficiently identify both feasible and optimal paths in complex, multi-obstacle environments. This challenge is intensified in robotic manipulators, where the risk of kinematic singularities and self-collisions further complicates motion efficiency and safety. To address these issues, we introduce the Just-in-Time Informed Trees (JIT*) algorithm, an enhancement over Effort Informed Trees (EIT*), designed to improve path planning through two core modules: the Just-in-Time module and the Motion Performance module. The Just-in-Time module includes "Just-in-Time Edge," which dynamically refines edge connectivity, and "Just-in-Time Sample," which adjusts sampling density in bottleneck areas to enable faster initial path discovery. The Motion Performance module balances manipulability and trajectory cost through dynamic switching, optimizing motion control while reducing the risk of singularities. Comparative analysis shows that JIT* consistently outperforms traditional sampling-based planners across $\mathbb{R}^4$ to $\mathbb{R}^{16}$ dimensions. Its effectiveness is further demonstrated in single-arm and dual-arm manipulation tasks, with experimental results available in a video at https://youtu.be/nL1BMHpMR7c.
Contact-Safe Reinforcement Learning with ProMP Reparameterization and Energy Awareness
Nov 17, 2025Reinforcement learning (RL) approaches based on Markov Decision Processes (MDPs) are predominantly applied in the robot joint space, often relying on limited task-specific information and partial awareness of the 3D environment. In contrast, episodic RL has demonstrated advantages over traditional MDP-based methods in terms of trajectory consistency, task awareness, and overall performance in complex robotic tasks. Moreover, traditional step-wise and episodic RL methods often neglect the contact-rich information inherent in task-space manipulation, especially considering the contact-safety and robustness. In this work, contact-rich manipulation tasks are tackled using a task-space, energy-safe framework, where reliable and safe task-space trajectories are generated through the combination of Proximal Policy Optimization (PPO) and movement primitives. Furthermore, an energy-aware Cartesian Impedance Controller objective is incorporated within the proposed framework to ensure safe interactions between the robot and the environment. Our experimental results demonstrate that the proposed framework outperforms existing methods in handling tasks on various types of surfaces in 3D environments, achieving high success rates as well as smooth trajectories and energy-safe interactions.
GeoPF: Infusing Geometry into Potential Fields for Reactive Planning in Non-trivial Environments
May 26, 2025



Reactive intelligence remains one of the cornerstones of versatile robotics operating in cluttered, dynamic, and human-centred environments. Among reactive approaches, potential fields (PF) continue to be widely adopted due to their simplicity and real-time applicability. However, existing PF methods typically oversimplify environmental representations by relying on isotropic, point- or sphere-based obstacle approximations. In human-centred settings, this simplification results in overly conservative paths, cumbersome tuning, and computational overhead -- even breaking real-time requirements. In response, we propose the Geometric Potential Field (GeoPF), a reactive motion-planning framework that explicitly infuses geometric primitives - points, lines, planes, cubes, and cylinders - into real-time planning. By leveraging precise closed-form distance functions, GeoPF significantly reduces computational complexity and parameter tuning effort. Extensive quantitative analyses consistently show GeoPF's higher success rates, reduced tuning complexity (a single parameter set across experiments), and substantially lower computational costs (up to 2 orders of magnitude) compared to traditional PF methods. Real-world experiments further validate GeoPF's robustness and practical ease of deployment. GeoPF provides a fresh perspective on reactive planning problems driving geometric-aware temporal motion generation, enabling flexible and low-latency motion planning suitable for modern robotic applications.
Geometrically-Aware One-Shot Skill Transfer of Category-Level Objects
Mar 19, 2025Robotic manipulation of unfamiliar objects in new environments is challenging and requires extensive training or laborious pre-programming. We propose a new skill transfer framework, which enables a robot to transfer complex object manipulation skills and constraints from a single human demonstration. Our approach addresses the challenge of skill acquisition and task execution by deriving geometric representations from demonstrations focusing on object-centric interactions. By leveraging the Functional Maps (FM) framework, we efficiently map interaction functions between objects and their environments, allowing the robot to replicate task operations across objects of similar topologies or categories, even when they have significantly different shapes. Additionally, our method incorporates a Task-Space Imitation Algorithm (TSIA) which generates smooth, geometrically-aware robot paths to ensure the transferred skills adhere to the demonstrated task constraints. We validate the effectiveness and adaptability of our approach through extensive experiments, demonstrating successful skill transfer and task execution in diverse real-world environments without requiring additional training.
Motion Planning for Robotics: A Review for Sampling-based Planners
Oct 28, 2024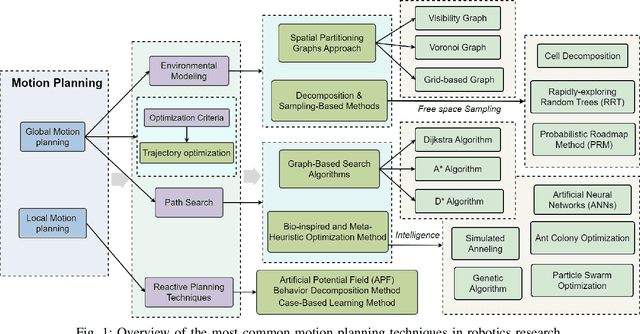
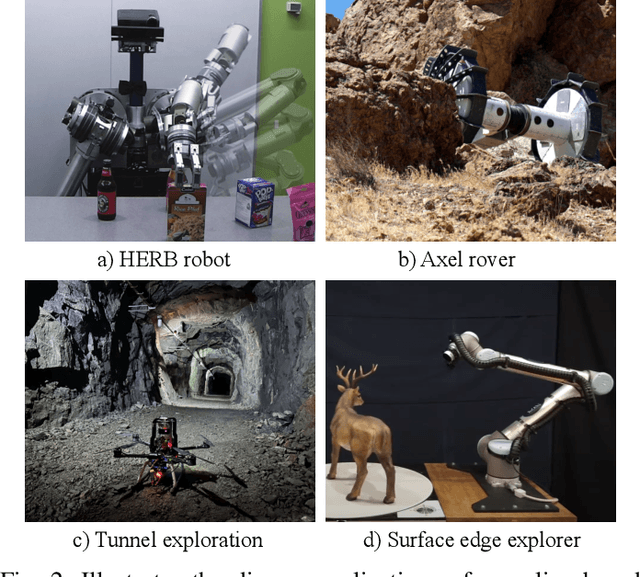
Recent advancements in robotics have transformed industries such as manufacturing, logistics, surgery, and planetary exploration. A key challenge is developing efficient motion planning algorithms that allow robots to navigate complex environments while avoiding collisions and optimizing metrics like path length, sweep area, execution time, and energy consumption. Among the available algorithms, sampling-based methods have gained the most traction in both research and industry due to their ability to handle complex environments, explore free space, and offer probabilistic completeness along with other formal guarantees. Despite their widespread application, significant challenges still remain. To advance future planning algorithms, it is essential to review the current state-of-the-art solutions and their limitations. In this context, this work aims to shed light on these challenges and assess the development and applicability of sampling-based methods. Furthermore, we aim to provide an in-depth analysis of the design and evaluation of ten of the most popular planners across various scenarios. Our findings highlight the strides made in sampling-based methods while underscoring persistent challenges. This work offers an overview of the important ongoing research in robotic motion planning.
Using The Concept Hierarchy for Household Action Recognition
Sep 13, 2024



We propose a method to systematically represent both the static and the dynamic components of environments, i.e. objects and agents, as well as the changes that are happening in the environment, i.e. the actions and skills performed by agents. Our approach, the Concept Hierarchy, provides the necessary information for autonomous systems to represent environment states, perform action modeling and recognition, and plan the execution of tasks. Additionally, the hierarchical structure supports generalization and knowledge transfer to environments. We rigorously define tasks, actions, skills, and affordances that enable human-understandable action and skill recognition.
Learning Barrier-Certified Polynomial Dynamical Systems for Obstacle Avoidance with Robots
Mar 13, 2024Established techniques that enable robots to learn from demonstrations are based on learning a stable dynamical system (DS). To increase the robots' resilience to perturbations during tasks that involve static obstacle avoidance, we propose incorporating barrier certificates into an optimization problem to learn a stable and barrier-certified DS. Such optimization problem can be very complex or extremely conservative when the traditional linear parameter-varying formulation is used. Thus, different from previous approaches in the literature, we propose to use polynomial representations for DSs, which yields an optimization problem that can be tackled by sum-of-squares techniques. Finally, our approach can handle obstacle shapes that fall outside the scope of assumptions typically found in the literature concerning obstacle avoidance within the DS learning framework. Supplementary material can be found at the project webpage: https://martinschonger.github.io/abc-ds
LoHoRavens: A Long-Horizon Language-Conditioned Benchmark for Robotic Tabletop Manipulation
Oct 23, 2023



The convergence of embodied agents and large language models (LLMs) has brought significant advancements to embodied instruction following. Particularly, the strong reasoning capabilities of LLMs make it possible for robots to perform long-horizon tasks without expensive annotated demonstrations. However, public benchmarks for testing the long-horizon reasoning capabilities of language-conditioned robots in various scenarios are still missing. To fill this gap, this work focuses on the tabletop manipulation task and releases a simulation benchmark, \textit{LoHoRavens}, which covers various long-horizon reasoning aspects spanning color, size, space, arithmetics and reference. Furthermore, there is a key modality bridging problem for long-horizon manipulation tasks with LLMs: how to incorporate the observation feedback during robot execution for the LLM's closed-loop planning, which is however less studied by prior work. We investigate two methods of bridging the modality gap: caption generation and learnable interface for incorporating explicit and implicit observation feedback to the LLM, respectively. These methods serve as the two baselines for our proposed benchmark. Experiments show that both methods struggle to solve some tasks, indicating long-horizon manipulation tasks are still challenging for current popular models. We expect the proposed public benchmark and baselines can help the community develop better models for long-horizon tabletop manipulation tasks.
A Concise Overview of Safety Aspects in Human-Robot Interaction
Sep 18, 2023



As of today, robots exhibit impressive agility but also pose potential hazards to humans using/collaborating with them. Consequently, safety is considered the most paramount factor in human-robot interaction (HRI). This paper presents a multi-layered safety architecture, integrating both physical and cognitive aspects for effective HRI. We outline critical requirements for physical safety layers as service modules that can be arbitrarily queried. Further, we showcase an HRI scheme that addresses human factors and perceived safety as high-level constraints on a validated impact safety paradigm. The aim is to enable safety certification of human-friendly robots across various HRI scenarios.
Towards Language-Based Modulation of Assistive Robots through Multimodal Models
Jun 27, 2023
In the field of Geriatronics, enabling effective and transparent communication between humans and robots is crucial for enhancing the acceptance and performance of assistive robots. Our early-stage research project investigates the potential of language-based modulation as a means to improve human-robot interaction. We propose to explore real-time modulation during task execution, leveraging language cues, visual references, and multimodal inputs. By developing transparent and interpretable methods, we aim to enable robots to adapt and respond to language commands, enhancing their usability and flexibility. Through the exchange of insights and knowledge at the workshop, we seek to gather valuable feedback to advance our research and contribute to the development of interactive robotic systems for Geriatronics and beyond.