 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-end example-based sim-to-real RL policy transfer based on neural stylisation with application to robotic cutting
Jan 28, 2026Whereas reinforcement learning has been applied with success to a range of robotic control problems in complex, uncertain environments, reliance on extensive data - typically sourced from simulation environments - limits real-world deployment due to the domain gap between simulated and physical systems, coupled with limited real-world sample availability. We propose a novel method for sim-to-real transfer of reinforcement learning policies, based on a reinterpretation of neural style transfer from image processing to synthesise novel training data from unpaired unlabelled real world datasets. We employ a variational autoencoder to jointly learn self-supervised feature representations for style transfer and generate weakly paired source-target trajectories to improve physical realism of synthesised trajectories. We demonstrate the application of our approach based on the case study of robot cutting of unknown materials. Compared to baseline methods, including our previous work, CycleGAN, and conditional variational autoencoder-based time series translation, our approach achieves improved task completion time and behavioural stability with minimal real-world data. Our framework demonstrates robustness to geometric and material variation, and highlights the feasibility of policy adaptation in challenging contact-rich tasks where real-world reward information is unavailable.
An Exploratory Study on Human-Robot Interaction using Semantics-based Situational Awareness
Jul 23, 2025In this paper, we investigate the impact of high-level semantics (evaluation of the environment) on Human-Robot Teams (HRT) and Human-Robot Interaction (HRI) in the context of mobile robot deployments. Although semantics has been widely researched in AI, how high-level semantics can benefit the HRT paradigm is underexplored, often fuzzy, and intractable. We applied a semantics-based framework that could reveal different indicators of the environment (i.e. how much semantic information exists) in a mock-up disaster response mission. In such missions, semantics are crucial as the HRT should handle complex situations and respond quickly with correct decisions, where humans might have a high workload and stress. Especially when human operators need to shift their attention between robots and other tasks, they will struggle to build Situational Awareness (SA) quickly. The experiment suggests that the presented semantics: 1) alleviate the perceived workload of human operators; 2) increase the operator's trust in the SA; and 3) help to reduce the reaction time in switching the level of autonomy when needed. Additionally, we find that participants with higher trust in the system are encouraged by high-level semantics to use teleoperation mode more.
Geometrically-Aware One-Shot Skill Transfer of Category-Level Objects
Mar 19, 2025Robotic manipulation of unfamiliar objects in new environments is challenging and requires extensive training or laborious pre-programming. We propose a new skill transfer framework, which enables a robot to transfer complex object manipulation skills and constraints from a single human demonstration. Our approach addresses the challenge of skill acquisition and task execution by deriving geometric representations from demonstrations focusing on object-centric interactions. By leveraging the Functional Maps (FM) framework, we efficiently map interaction functions between objects and their environments, allowing the robot to replicate task operations across objects of similar topologies or categories, even when they have significantly different shapes. Additionally, our method incorporates a Task-Space Imitation Algorithm (TSIA) which generates smooth, geometrically-aware robot paths to ensure the transferred skills adhere to the demonstrated task constraints. We validate the effectiveness and adaptability of our approach through extensive experiments, demonstrating successful skill transfer and task execution in diverse real-world environments without requiring additional training.
A Framework for Semantics-based Situational Awareness during Mobile Robot Deployments
Feb 19, 2025Deployment of robots into hazardous environments typically involves a ``Human-Robot Teaming'' (HRT) paradigm, in which a human supervisor interacts with a remotely operating robot inside the hazardous zone. Situational Awareness (SA) is vital for enabling HRT, to support navigation, planning, and decision-making. This paper explores issues of higher-level ``semantic'' information and understanding in SA. In semi-autonomous, or variable-autonomy paradigms, different types of semantic information may be important, in different ways, for both the human operator and an autonomous agent controlling the robot. We propose a generalizable framework for acquiring and combining multiple modalities of semantic-level SA during remote deployments of mobile robots. We demonstrate the framework with an example application of search and rescue (SAR) in disaster response robotics. We propose a set of ``environment semantic indicators" that can reflect a variety of different types of semantic information, e.g. indicators of risk, or signs of human activity, as the robot encounters different scenes. Based on these indicators, we propose a metric to describe the overall situation of the environment called ``Situational Semantic Richness (SSR)". This metric combines multiple semantic indicators to summarise the overall situation. The SSR indicates if an information-rich and complex situation has been encountered, which may require advanced reasoning for robots and humans and hence the attention of the expert human operator. The framework is tested on a Jackal robot in a mock-up disaster response environment. Experimental results demonstrate that the proposed semantic indicators are sensitive to changes in different modalities of semantic information in different scenes, and the SSR metric reflects overall semantic changes in the situations encountered.
The ATTUNE model for Artificial Trust Towards Human Operators
Nov 29, 2024



This paper presents a novel method to quantify Trust in HRI. It proposes an HRI framework for estimating the Robot Trust towards the Human in the context of a narrow and specified task. The framework produces a real-time estimation of an AI agent's Artificial Trust towards a Human partner interacting with a mobile teleoperation robot. The approach for the framework is based on principles drawn from Theory of Mind, including information about the human state, action, and intent. The framework creates the ATTUNE model for Artificial Trust Towards Human Operators. The model uses metrics on the operator's state of attention, navigational intent, actions, and performance to quantify the Trust towards them. The model is tested on a pre-existing dataset that includes recordings (ROSbags) of a human trial in a simulated disaster response scenario. The performance of ATTUNE is evaluated through a qualitative and quantitative analysis. The results of the analyses provide insight into the next stages of the research and help refine the proposed approach.
* Published in IEEE SMC 2024
Self-supervised cross-modality learning for uncertainty-aware object detection and recognition in applications which lack pre-labelled training data
Nov 05, 2024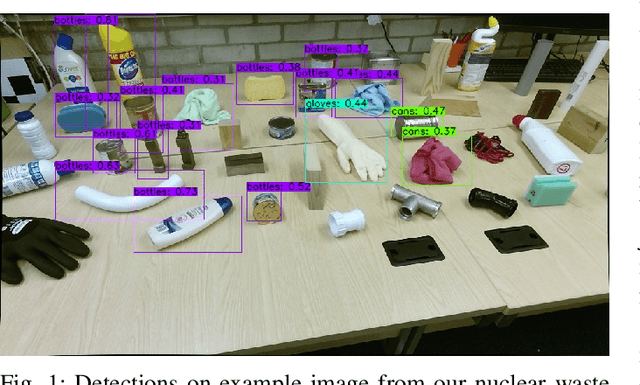
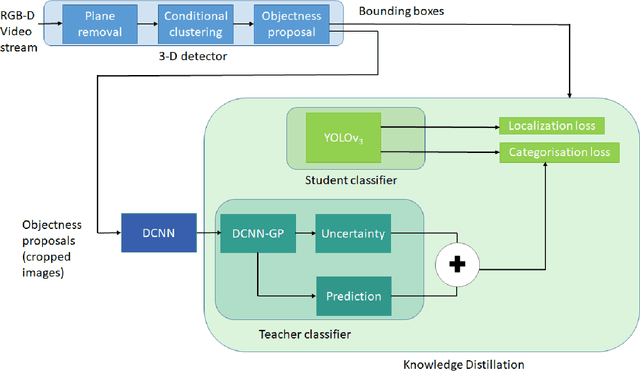
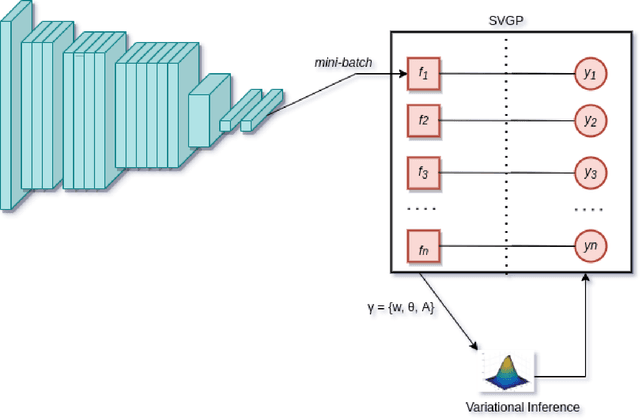
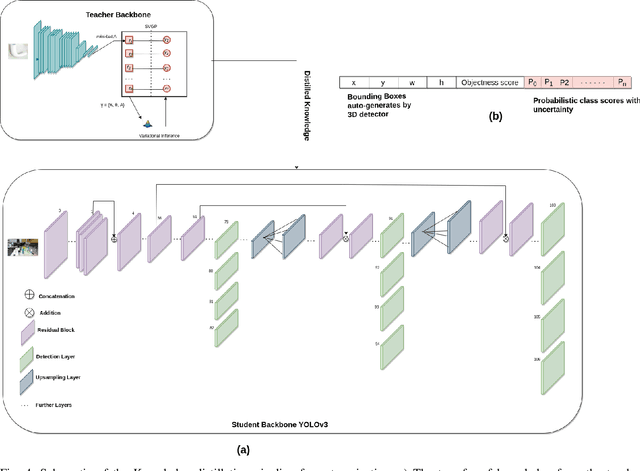
This paper shows how an uncertainty-aware, deep neural network can be trained to detect, recognise and localise objects in 2D RGB images, in applications lacking annotated train-ng datasets. We propose a self-supervising teacher-student pipeline, in which a relatively simple teacher classifier, trained with only a few labelled 2D thumbnails, automatically processes a larger body of unlabelled RGB-D data to teach a student network based on a modified YOLOv3 architecture. Firstly, 3D object detection with back projection is used to automatically extract and teach 2D detection and localisation information to the student network. Secondly, a weakly supervised 2D thumbnail classifier, with minimal training on a small number of hand-labelled images, is used to teach object category recognition. Thirdly, we use a Gaussian Process GP to encode and teach a robust uncertainty estimation functionality, so that the student can output confidence scores with each categorization. The resulting student significantly outperforms the same YOLO architecture trained directly on the same amount of labelled data. Our GP-based approach yields robust and meaningful uncertainty estimations for complex industrial object classifications. The end-to-end network is also capable of real-time processing, needed for robotics applications. Our method can be applied to many important industrial tasks, where labelled datasets are typically unavailable. In this paper, we demonstrate an example of detection, localisation, and object category recognition of nuclear mixed-waste materials in highly cluttered and unstructured scenes. This is critical for robotic sorting and handling of legacy nuclear waste, which poses complex environmental remediation challenges in many nuclearised nations.
An Adaptive Dual-Domain Prediction Strategy based on Second-order Derivatives for Dynamic Multi-Objective Optimization
Oct 08, 2024This paper addresses the problem of dynamic multi-objective optimization problems (DMOPs), by demonstrating new approaches to change prediction strategies within an evolutionary algorithm paradigm. Because the objectives of such problems change over time, the Pareto optimal set (PS) and Pareto optimal front (PF) are also dynamic. To accurately track the changing PS and PF in the decision and objective spaces, we propose a novel adaptive prediction strategy, which utilizes the concept of second-order derivatives adaptively in different domains. %to deal with DMOPs. Firstly, the changes in both the PS and the PF are considered in this paper, which makes the proposed a dual-domain based method. Firstly, we propose a dual-domain method, which takes into account changes in both the PS and the PF simultaneously. An adaptive strategy is adopted to self-adjust the proportion of the search space. Secondly, a second-order derivative prediction strategy is proposed to predicatively re-initialize the population. We compare the performance of the proposed algorithm against four other state-of-the-art algorithms from the literature, using DMOPs benchmark problems. Experimental results show that the proposed method outperforms the other algorithms on most of the test problems.
A Mini-Review on Mobile Manipulators with Variable Autonomy
Aug 20, 2024

This paper presents a mini-review of the current state of research in mobile manipulators with variable levels of autonomy, emphasizing their associated challenges and application environments. The need for mobile manipulators in different environments is evident due to the unique challenges and risks each presents. Many systems deployed in these environments are not fully autonomous, requiring human-robot teaming to ensure safe and reliable operations under uncertainties. Through this analysis, we identify gaps and challenges in the literature on Variable Autonomy, including cognitive workload and communication delays, and propose future directions, including whole-body Variable Autonomy for mobile manipulators, virtual reality frameworks, and large language models to reduce operators' complexity and cognitive load in some challenging and uncertain scenarios.
Semi-autonomous Robotic Disassembly Enhanced by Mixed Reality
May 06, 2024In this study, we introduce "SARDiM," a modular semi-autonomous platform enhanced with mixed reality for industrial disassembly tasks. Through a case study focused on EV battery disassembly, SARDiM integrates Mixed Reality, object segmentation, teleoperation, force feedback, and variable autonomy. Utilising the ROS, Unity, and MATLAB platforms, alongside a joint impedance controller, SARDiM facilitates teleoperated disassembly. The approach combines FastSAM for real-time object segmentation, generating data which is subsequently processed through a cluster analysis algorithm to determine the centroid and orientation of the components, categorizing them by size and disassembly priority. This data guides the MoveIt platform in trajectory planning for the Franka Robot arm. SARDiM provides the capability to switch between two teleoperation modes: manual and semi-autonomous with variable autonomy. Each was evaluated using four different Interface Methods (IM): direct view, monitor feed, mixed reality with monitor feed, and point cloud mixed reality. Evaluations across the eight IMs demonstrated a 40.61% decrease in joint limit violations using Mode 2. Moreover, Mode 2-IM4 outperformed Mode 1-IM1 by achieving a 2.33%-time reduction while considerably increasing safety, making it optimal for operating in hazardous environments at a safe distance, with the same ease of use as teleoperation with a direct view of the environment.
Learning effects in variable autonomy human-robot systems: how much training is enough?
Nov 16, 2023

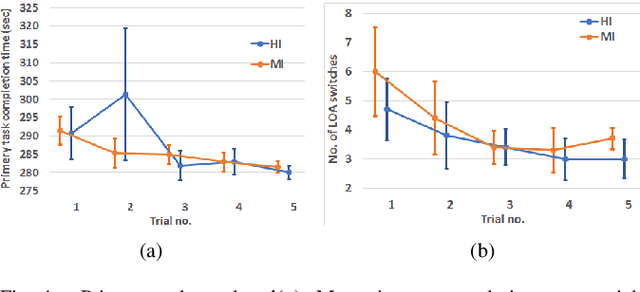
This paper investigates learning effects and human operator training practices in variable autonomy robotic systems. These factors are known to affect performance of a human-robot system and are frequently overlooked. We present the results from an experiment inspired by a search and rescue scenario in which operators remotely controlled a mobile robot with either Human-Initiative (HI) or Mixed-Initiative (MI) control. Evidence suggests learning in terms of primary navigation task and secondary (distractor) task performance. Further evidence is provided that MI and HI performance in a pure navigation task is equal. Lastly, guidelines are proposed for experimental design and operator training practices.
* This paper is a preprint of the paper published on the IEEE International Conference on Systems, Man and Cybernetics (SMC) 2019