 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe ATTUNE model for Artificial Trust Towards Human Operators
Nov 29, 2024



This paper presents a novel method to quantify Trust in HRI. It proposes an HRI framework for estimating the Robot Trust towards the Human in the context of a narrow and specified task. The framework produces a real-time estimation of an AI agent's Artificial Trust towards a Human partner interacting with a mobile teleoperation robot. The approach for the framework is based on principles drawn from Theory of Mind, including information about the human state, action, and intent. The framework creates the ATTUNE model for Artificial Trust Towards Human Operators. The model uses metrics on the operator's state of attention, navigational intent, actions, and performance to quantify the Trust towards them. The model is tested on a pre-existing dataset that includes recordings (ROSbags) of a human trial in a simulated disaster response scenario. The performance of ATTUNE is evaluated through a qualitative and quantitative analysis. The results of the analyses provide insight into the next stages of the research and help refine the proposed approach.
* Published in IEEE SMC 2024
A Supervised Machine Learning Approach to Operator Intent Recognition for Teleoperated Mobile Robot Navigation
Apr 27, 2023In applications that involve human-robot interaction (HRI), human-robot teaming (HRT), and cooperative human-machine systems, the inference of the human partner's intent is of critical importance. This paper presents a method for the inference of the human operator's navigational intent, in the context of mobile robots that provide full or partial (e.g., shared control) teleoperation. We propose the Machine Learning Operator Intent Inference (MLOII) method, which a) processes spatial data collected by the robot's sensors; b) utilizes a supervised machine learning algorithm to estimate the operator's most probable navigational goal online. The proposed method's ability to reliably and efficiently infer the intent of the human operator is experimentally evaluated in realistically simulated exploration and remote inspection scenarios. The results in terms of accuracy and uncertainty indicate that the proposed method is comparable to another state-of-the-art method found in the literature.
A Hierarchical Variable Autonomy Mixed-Initiative Framework for Human-Robot Teaming in Mobile Robotics
Nov 25, 2022


This paper presents a Mixed-Initiative (MI) framework for addressing the problem of control authority transfer between a remote human operator and an AI agent when cooperatively controlling a mobile robot. Our Hierarchical Expert-guided Mixed-Initiative Control Switcher (HierEMICS) leverages information on the human operator's state and intent. The control switching policies are based on a criticality hierarchy. An experimental evaluation was conducted in a high-fidelity simulated disaster response and remote inspection scenario, comparing HierEMICS with a state-of-the-art Expert-guided Mixed-Initiative Control Switcher (EMICS) in the context of mobile robot navigation. Results suggest that HierEMICS reduces conflicts for control between the human and the AI agent, which is a fundamental challenge in both the MI control paradigm and also in the related shared control paradigm. Additionally, we provide statistically significant evidence of improved, navigational safety (i.e., fewer collisions), LOA switching efficiency, and conflict for control reduction.
Robot-Assisted Nuclear Disaster Response: Report and Insights from a Field Exercise
Jul 01, 2022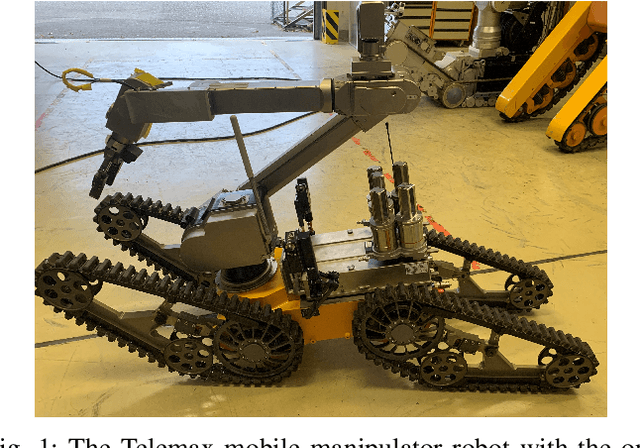
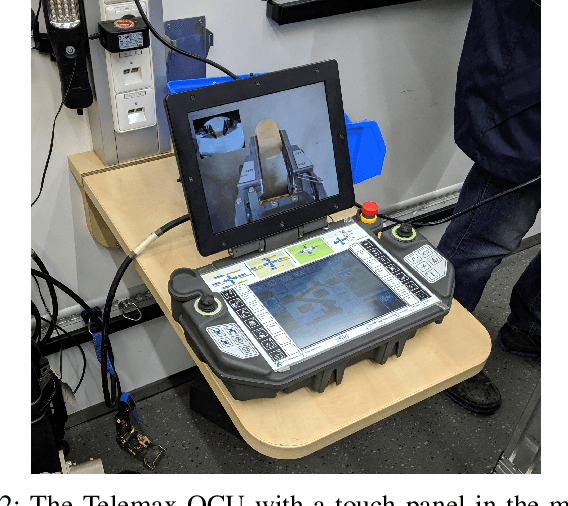

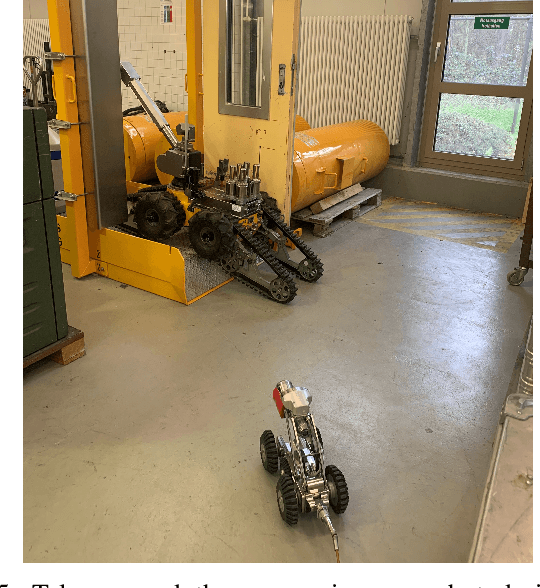
This paper reports on insights by robotics researchers that participated in a 5-day robot-assisted nuclear disaster response field exercise conducted by Kerntechnische Hilfdienst GmbH (KHG) in Karlsruhe, Germany. The German nuclear industry established KHG to provide a robot-assisted emergency response capability for nuclear accidents. We present a systematic description of the equipment used; the robot operators' training program; the field exercise and robot tasks; and the protocols followed during the exercise. Additionally, we provide insights and suggestions for advancing disaster response robotics based on these observations. Specifically, the main degradation in performance comes from the cognitive and attentional demands on the operator. Furthermore, robotic platforms and modules should aim to be robust and reliable in addition to their ease of use. Last, as emergency response stakeholders are often skeptical about using autonomous systems, we suggest adopting a variable autonomy paradigm to integrate autonomous robotic capabilities with the human-in-the-loop gradually. This middle ground between teleoperation and autonomy can increase end-user acceptance while directly alleviating some of the operator's robot control burden and maintaining the resilience of the human-in-the-loop.
A Bayesian-Based Approach to Human Operator Intent Recognition in Remote Mobile Robot Navigation
Sep 24, 2021
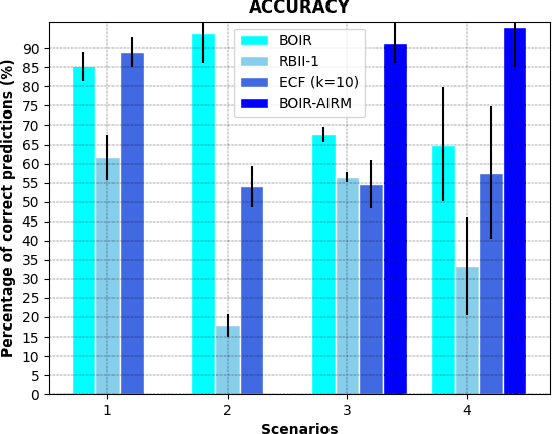
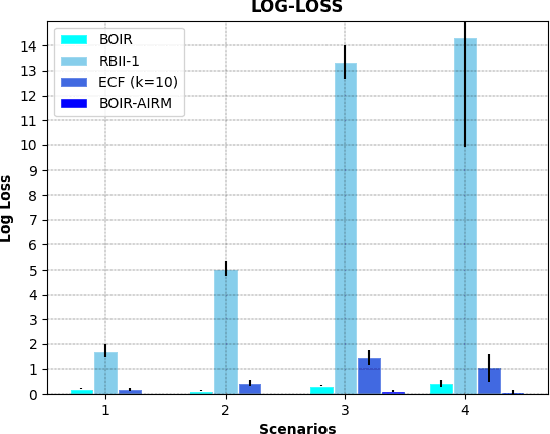
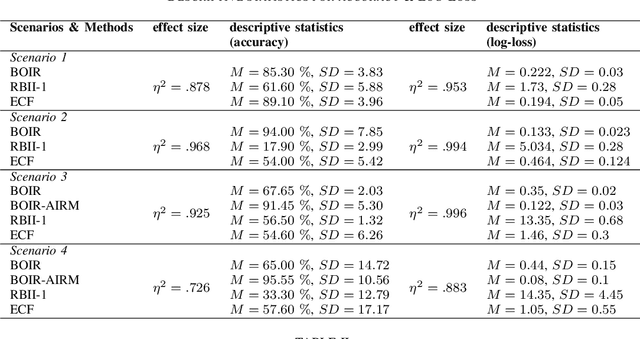
This paper addresses the problem of human operator intent recognition during teleoperated robot navigation. In this context, recognition of the operator's intended navigational goal, could enable an artificial intelligence (AI) agent to assist the operator in an advanced human-robot interaction framework. We propose a Bayesian Operator Intent Recognition (BOIR) probabilistic method that utilizes: (i) an observation model that fuses information as a weighting combination of multiple observation sources providing geometric information; (ii) a transition model that indicates the evolution of the state; and (iii) an action model, the Active Intent Recognition Model (AIRM), that enables the operator to communicate their explicit intent asynchronously. The proposed method is evaluated in an experiment where operators controlling a remote mobile robot are tasked with navigation and exploration under various scenarios with different map and obstacle layouts. Results demonstrate that BOIR outperforms two related methods from literature in terms of accuracy and uncertainty of the intent recognition.
Human operator cognitive availability aware Mixed-Initiative control
Aug 26, 2021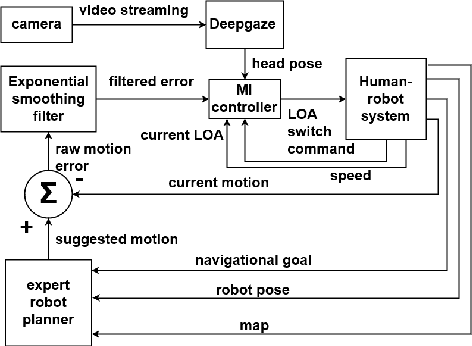

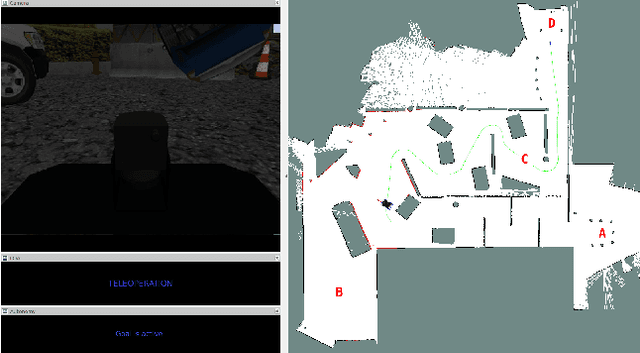
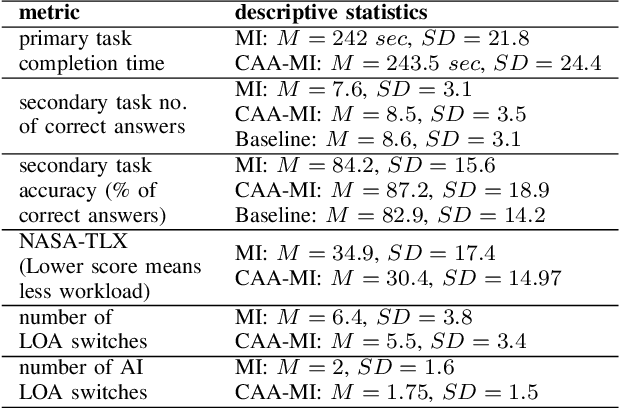
This paper presents a Cognitive Availability Aware Mixed-Initiative Controller for remotely operated mobile robots. The controller enables dynamic switching between different levels of autonomy (LOA), initiated by either the AI or the human operator. The controller leverages a state-of-the-art computer vision method and an off-the-shelf web camera to infer the cognitive availability of the operator and inform the AI-initiated LOA switching. This constitutes a qualitative advancement over previous Mixed-Initiative (MI) controllers. The controller is evaluated in a disaster response experiment, in which human operators have to conduct an exploration task with a remote robot. MI systems are shown to effectively assist the operators, as demonstrated by quantitative and qualitative results in performance and workload. Additionally, some insights into the experimental difficulties of evaluating complex MI controllers are presented.
* 4 pages