 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeG-MAPP: GPU-accelerated Multi-Agent Planning and Perception for Reactive Motion Generation
Jun 10, 2026Reactive motion generation in unstructured environments remains an open challenge in robotics. Due to the computational complexity of collision-free motion generation, existing methods either generate global trajectories for static scenarios, or employ models that make conservative assumptions about the environment. This paper identifies the primary bottleneck as the runtime performance demand of planning on high-fidelity environments, and the temporal integration between the perception and planning modules. Therefore, we propose a framework that does not compromise on runtime performance and world representations for perception and planning by accelerating world modeling and vector-field based planning using the GPU. This allows us to achieve faster parallel state exploration for quasi-global trajectory planning, and tighter coupling of the perception-action loop in real-time for dynamic cluttered environments with off-the-shelf depth sensors. We quantitatively evaluate the computation-time and success rate differences for the CPU and GPU versions of our planner, and perform qualitative evaluations of our coupled framework using real-world experiments on a 7-DoF Franka Emika robot. Experimental results demonstrate that our GPU-based framework achieves up to a 5x speedup over the CPU version and successfully avoids collisions across both trivial and challenging physical world scenarios.
* The implementation is available at: https://github.com/chart-research/g-mapp
Optimal Control Approach for Non-prehensile Ball Juggling Using a 7-DoF Manipulator
Jun 04, 2026Non-prehensile object manipulation skills are important for real-world robot interactions, enabling highly dynamic tasks such as balancing a glass on a tray or the controlled sliding of items on a table. Among such tasks, those characterised by high-speed manipulation requirements and general sensitivity of the resulting hybrid dynamics are particularly hard to accomplish. Within these, juggling can be seen as a highly challenging maneuver to be solved. The key to robotic juggling is achieving dynamic stabilisation of an underactuated object. Since the object does not possess the ability of self-correction, its stability is entirely dependent on the forces applied to it. This creates a system that is sensitive to control inputs, where timing is critical to continuously counteract deviations and maintain the desired behavior. We develop a systematic method to control a 7-degree-of-freedom manipulator performing non-prehensile ball juggling with a tool. Our primary contribution is a model-based framework for generating juggling trajectories and stabilizing a periodic juggling motion for this hybrid system. The framework incorporates a two-stage optimal control approach to compute the underlying feasible motion patterns required for stable juggling. Offline-computed trajectories are then organised to enable real-time error correction without solving optimal control problems online. We demonstrate the effectiveness of the resulting controller by first evaluating its performance in a simulation environment and performing an experiment using a Franka Emika Panda robot.
Coupling Tensor Trains with Graph of Convex Sets: Effective Compression, Exploration, and Planning in the C-Space
Mar 12, 2026We present TANGO (Tensor ANd Graph Optimization), a novel motion planning framework that integrates tensor-based compression with structured graph optimization to enable efficient and scalable trajectory generation. While optimization-based planners such as the Graph of Convex Sets (GCS) offer powerful tools for generating smooth, optimal trajectories, they typically rely on a predefined convex characterization of the high-dimensional configuration space-a requirement that is often intractable for general robotic tasks. TANGO builds further by using Tensor Train decomposition to approximate the feasible configuration space in a compressed form, enabling rapid discovery and estimation of task-relevant regions. These regions are then embedded into a GCS-like structure, allowing for geometry-aware motion planning that respects both system constraints and environmental complexity. By coupling tensor-based compression with structured graph reasoning, TANGO enables efficient, geometry-aware motion planning and lays the groundwork for more expressive and scalable representations of configuration space in future robotic systems. Rigorous simulation studies on planar and real robots reinforce our claims of effective compression and higher quality trajectories.
A Unified Complementarity-based Approach for Rigid-Body Manipulation and Motion Prediction
Feb 04, 2026Robotic manipulation in unstructured environments requires planners to reason jointly about free-space motion and sustained, frictional contact with the environment. Existing (local) planning and simulation frameworks typically separate these regimes or rely on simplified contact representations, particularly when modeling non-convex or distributed contact patches. Such approximations limit the fidelity of contact-mode transitions and hinder the robust execution of contact-rich behaviors in real time. This paper presents a unified discrete-time modeling framework for robotic manipulation that consistently captures both free motion and frictional contact within a single mathematical formalism (Unicomp). Building on complementarity-based rigid-body dynamics, we formulate free-space motion and contact interactions as coupled linear and nonlinear complementarity problems, enabling principled transitions between contact modes without enforcing fixed-contact assumptions. For planar patch contact, we derive a frictional contact model from the maximum power dissipation principle in which the set of admissible contact wrenches is represented by an ellipsoidal limit surface. This representation captures coupled force-moment effects, including torsional friction, while remaining agnostic to the underlying pressure distribution across the contact patch. The resulting formulation yields a discrete-time predictive model that relates generalized velocities and contact wrenches through quadratic constraints and is suitable for real-time optimization-based planning. Experimental results show that the proposed approach enables stable, physically consistent behavior at interactive speeds across tasks, from planar pushing to contact-rich whole-body maneuvers.
GeoPF: Infusing Geometry into Potential Fields for Reactive Planning in Non-trivial Environments
May 26, 2025



Reactive intelligence remains one of the cornerstones of versatile robotics operating in cluttered, dynamic, and human-centred environments. Among reactive approaches, potential fields (PF) continue to be widely adopted due to their simplicity and real-time applicability. However, existing PF methods typically oversimplify environmental representations by relying on isotropic, point- or sphere-based obstacle approximations. In human-centred settings, this simplification results in overly conservative paths, cumbersome tuning, and computational overhead -- even breaking real-time requirements. In response, we propose the Geometric Potential Field (GeoPF), a reactive motion-planning framework that explicitly infuses geometric primitives - points, lines, planes, cubes, and cylinders - into real-time planning. By leveraging precise closed-form distance functions, GeoPF significantly reduces computational complexity and parameter tuning effort. Extensive quantitative analyses consistently show GeoPF's higher success rates, reduced tuning complexity (a single parameter set across experiments), and substantially lower computational costs (up to 2 orders of magnitude) compared to traditional PF methods. Real-world experiments further validate GeoPF's robustness and practical ease of deployment. GeoPF provides a fresh perspective on reactive planning problems driving geometric-aware temporal motion generation, enabling flexible and low-latency motion planning suitable for modern robotic applications.
Unifying Complementarity Constraints and Control Barrier Functions for Safe Whole-Body Robot Control
Apr 24, 2025Safety-critical whole-body robot control demands reactive methods that ensure collision avoidance in real-time. Complementarity constraints and control barrier functions (CBF) have emerged as core tools for ensuring such safety constraints, and each represents a well-developed field. Despite addressing similar problems, their connection remains largely unexplored. This paper bridges this gap by formally proving the equivalence between these two methodologies for sampled-data, first-order systems, considering both single and multiple constraint scenarios. By demonstrating this equivalence, we provide a unified perspective on these techniques. This unification has theoretical and practical implications, facilitating the cross-application of robustness guarantees and algorithmic improvements between complementarity and CBF frameworks. We discuss these synergistic benefits and motivate future work in the comparison of the methods in more general cases.
Geometrically-Aware One-Shot Skill Transfer of Category-Level Objects
Mar 19, 2025Robotic manipulation of unfamiliar objects in new environments is challenging and requires extensive training or laborious pre-programming. We propose a new skill transfer framework, which enables a robot to transfer complex object manipulation skills and constraints from a single human demonstration. Our approach addresses the challenge of skill acquisition and task execution by deriving geometric representations from demonstrations focusing on object-centric interactions. By leveraging the Functional Maps (FM) framework, we efficiently map interaction functions between objects and their environments, allowing the robot to replicate task operations across objects of similar topologies or categories, even when they have significantly different shapes. Additionally, our method incorporates a Task-Space Imitation Algorithm (TSIA) which generates smooth, geometrically-aware robot paths to ensure the transferred skills adhere to the demonstrated task constraints. We validate the effectiveness and adaptability of our approach through extensive experiments, demonstrating successful skill transfer and task execution in diverse real-world environments without requiring additional training.
On the Synthesis of Reactive Collision-Free Whole-Body Robot Motions: A Complementarity-based Approach
Oct 29, 2024This paper is about generating motion plans for high degree-of-freedom systems that account for collisions along the entire body. A particular class of mathematical programs with complementarity constraints become useful in this regard. Optimization-based planners can tackle confined-space trajectory planning while being cognizant of robot constraints. However, introducing obstacles in this setting transforms the formulation into a non-convex problem (oftentimes with ill-posed bilinear constraints), which is non-trivial in a real-time setting. To this end, we present the FLIQC (Fast LInear Quadratic Complementarity based) motion planner. Our planner employs a novel motion model that captures the entire rigid robot as well as the obstacle geometry and ensures non-penetration between the surfaces due to the imposed constraint. We perform thorough comparative studies with the state-of-the-art, which demonstrate improved performance. Extensive simulation and hardware experiments validate our claim of generating continuous and reactive motion plans at 1 kHz for modern collaborative robots with constant minimal parameters.
A General Formulation for Path Constrained Time-Optimized Trajectory Planning with Environmental and Object Contacts
Oct 08, 2024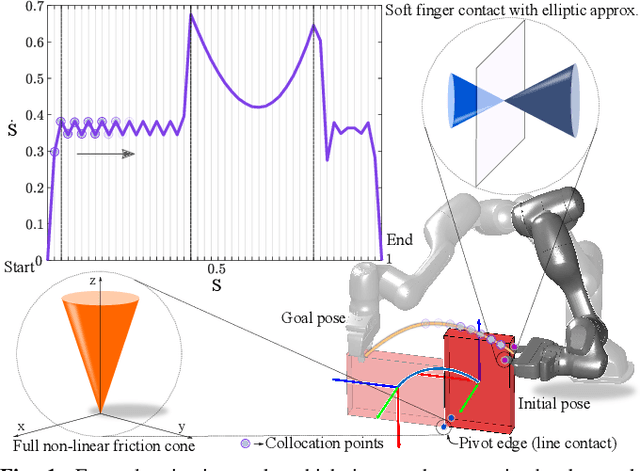
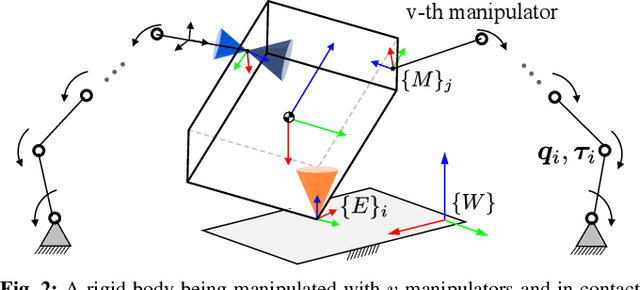
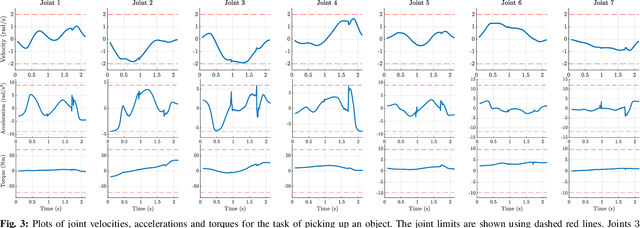

A typical manipulation task consists of a manipulator equipped with a gripper to grasp and move an object with constraints on the motion of the hand-held object, which may be due to the nature of the task itself or from object-environment contacts. In this paper, we study the problem of computing joint torques and grasping forces for time-optimal motion of an object, while ensuring that the grasp is not lost and any constraints on the motion of the object, either due to dynamics, environment contact, or no-slip requirements, are also satisfied. We present a second-order cone program (SOCP) formulation of the time-optimal trajectory planning problem that considers nonlinear friction cone constraints at the hand-object and object-environment contacts. Since SOCPs are convex optimization problems that can be solved optimally in polynomial time using interior point methods, we can solve the trajectory optimization problem efficiently. We present simulation results on three examples, including a non-prehensile manipulation task, which shows the generality and effectiveness of our approach.
Geometric Slosh-Free Tracking for Robotic Manipulators
Feb 07, 2024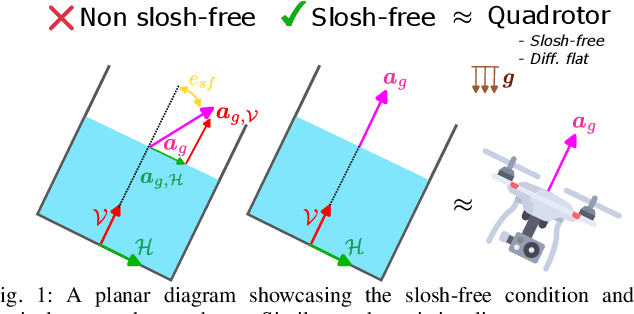
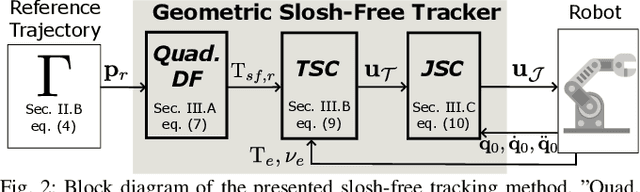
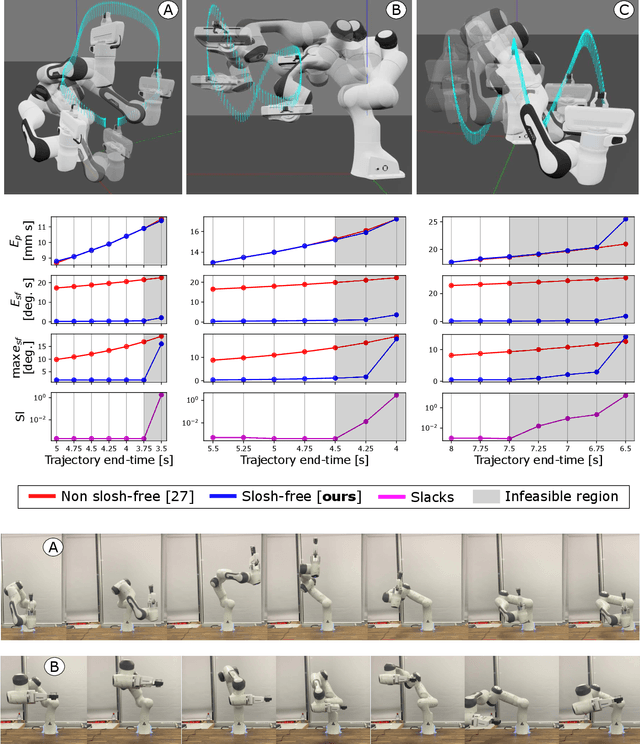
This work focuses on the agile transportation of liquids with robotic manipulators. In contrast to existing methods that are either computationally heavy, system/container specific or dependant on a singularity-prone pendulum model, we present a real-time slosh-free tracking technique. This method solely requires the reference trajectory and the robot's kinematic constraints to output kinematically feasible joint space commands. The crucial element underlying this approach consists on mimicking the end-effector's motion through a virtual quadrotor, which is inherently slosh-free and differentially flat, thereby allowing us to calculate a slosh-free reference orientation. Through the utilization of a cascaded proportional-derivative (PD) controller, this slosh-free reference is transformed into task space acceleration commands, which, following the resolution of a Quadratic Program (QP) based on Resolved Acceleration Control (RAC), are translated into a feasible joint configuration. The validity of the proposed approach is demonstrated by simulated and real-world experiments on a 7 DoF Franka Emika Panda robot. Code: https://github.com/jonarriza96/gsft Video: https://youtu.be/4kitqYVS9n8