 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnifying Complementarity Constraints and Control Barrier Functions for Safe Whole-Body Robot Control
Apr 24, 2025Safety-critical whole-body robot control demands reactive methods that ensure collision avoidance in real-time. Complementarity constraints and control barrier functions (CBF) have emerged as core tools for ensuring such safety constraints, and each represents a well-developed field. Despite addressing similar problems, their connection remains largely unexplored. This paper bridges this gap by formally proving the equivalence between these two methodologies for sampled-data, first-order systems, considering both single and multiple constraint scenarios. By demonstrating this equivalence, we provide a unified perspective on these techniques. This unification has theoretical and practical implications, facilitating the cross-application of robustness guarantees and algorithmic improvements between complementarity and CBF frameworks. We discuss these synergistic benefits and motivate future work in the comparison of the methods in more general cases.
GeoFIK: A Fast and Reliable Geometric Solver for the IK of the Franka Arm based on Screw Theory Enabling Multiple Redundancy Parameters
Mar 06, 2025Modern robotics applications require an inverse kinematics (IK) solver that is fast, robust and consistent, and that provides all possible solutions. Currently, the Franka robot arm is the most widely used manipulator in robotics research. With 7 DOFs, the IK of this robot is not only complex due to its 1-DOF redundancy, but also due to the link offsets at the wrist and elbow. Due to this complexity, none of the Franka IK solvers available in the literature provide satisfactory results when used in real-world applications. Therefore, in this paper we introduce GeoFIK (Geometric Franka IK), an analytical IK solver that allows the use of different joint variables to resolve the redundancy. The approach uses screw theory to describe the entire geometry of the robot, allowing the computation of the Jacobian matrix prior to computation of joint angles. All singularities are identified and handled. As an example of how the geometric elements obtained by the IK can be exploited, a solver with the swivel angle as the free variable is provided. Several experiments are carried out to validate the speed, robustness and reliability of the GeoFIK against two state-of-the-art solvers.
On the Synthesis of Reactive Collision-Free Whole-Body Robot Motions: A Complementarity-based Approach
Oct 29, 2024This paper is about generating motion plans for high degree-of-freedom systems that account for collisions along the entire body. A particular class of mathematical programs with complementarity constraints become useful in this regard. Optimization-based planners can tackle confined-space trajectory planning while being cognizant of robot constraints. However, introducing obstacles in this setting transforms the formulation into a non-convex problem (oftentimes with ill-posed bilinear constraints), which is non-trivial in a real-time setting. To this end, we present the FLIQC (Fast LInear Quadratic Complementarity based) motion planner. Our planner employs a novel motion model that captures the entire rigid robot as well as the obstacle geometry and ensures non-penetration between the surfaces due to the imposed constraint. We perform thorough comparative studies with the state-of-the-art, which demonstrate improved performance. Extensive simulation and hardware experiments validate our claim of generating continuous and reactive motion plans at 1 kHz for modern collaborative robots with constant minimal parameters.
Smooth real-time motion planning based on a cascade dual-quaternion screw-geometry MPC
Feb 07, 2024This paper investigates the tracking problem of a smooth coordinate-invariant trajectory using dual quaternion algebra. The proposed architecture consists of a cascade structure in which the outer-loop MPC performs real-time smoothing of the manipulator's end-effector twist while an inner-loop kinematic controller ensures tracking of the instantaneous desired end-effector pose. Experiments on a $7$-DoF Franka Emika Panda robotic manipulator validate the proposed method demonstrating its application to constraint the robot twists, accelerations and jerks within prescribed bounds.
A Solution to Slosh-free Robot Trajectory Optimization
Oct 23, 2022This paper is about fast slosh free fluid transportation. Existing approaches are either computationally heavy or only suitable for specific robots and container shapes. We model the end effector as a point mass suspended by a spherical pendulum and study the requirements for slosh free motion and the validity of the point mass model. In this approach, slosh free trajectories are generated by controlling the pendulum's pivot and simulating the motion of the point mass. We cast the trajectory optimization problem as a quadratic program; this strategy can be used to obtain valid control inputs. Through simulations and experiments on a 7 DoF Franka Emika Panda robot we validate the effectiveness of the proposed approach.
Coordinate Invariant User-Guided Constrained Path Planning with Reactive Rapidly Expanding Plane-Oriented Escaping Trees
Mar 20, 2022
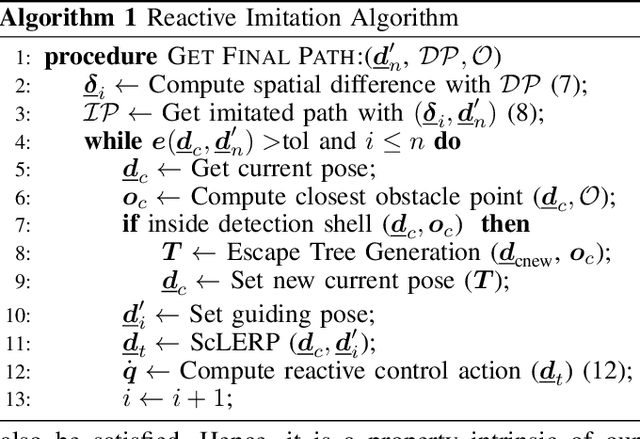
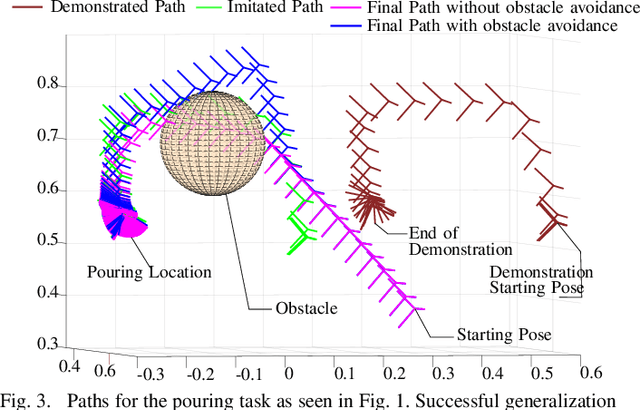
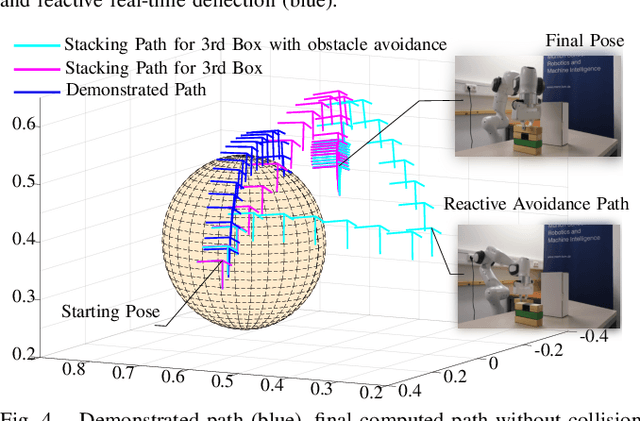
As collaborative robots move closer to human environments, motion generation and reactive planning strategies that allow for elaborate task execution with minimal easy-to-implement guidance whilst coping with changes in the environment is of paramount importance. In this paper, we present a novel approach for generating real-time motion plans for point-to-point tasks using a single successful human demonstration. Our approach is based on screw linear interpolation,which allows us to respect the underlying geometric constraints that characterize the task and are implicitly present in the demonstration. We also integrate an original reactive collision avoidance approach with our planner. We present extensive experimental results to demonstrate that with our approach,by using a single demonstration of moving one block, we can generate motion plans for complex tasks like stacking multiple blocks (in a dynamic environment). Analogous generalization abilities are also shown for tasks like pouring and loading shelves. For the pouring task, we also show that a demonstration given for one-armed pouring can be used for planning pouring with a dual-armed manipulator of different kinematic structure.
Manipulation Planning under Changing External Forces
Jul 30, 2018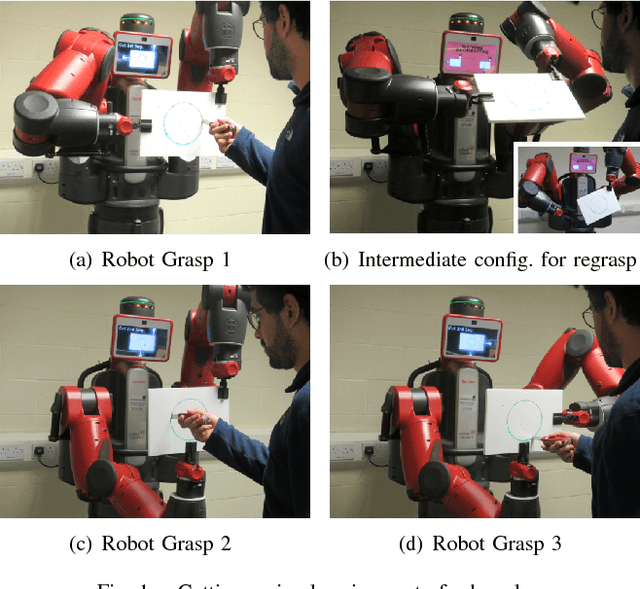

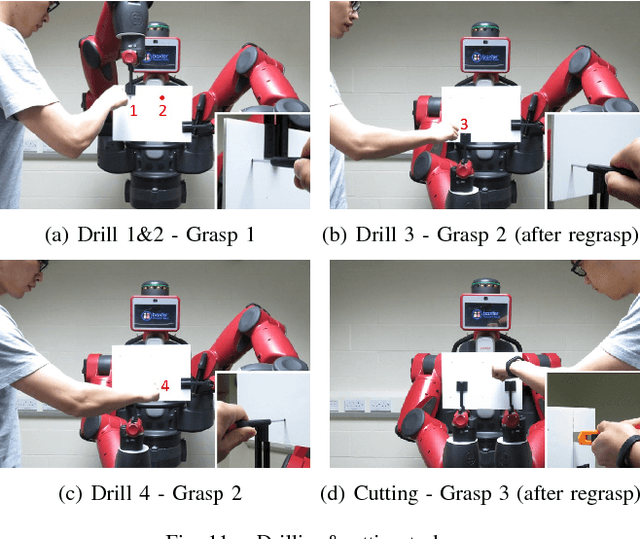
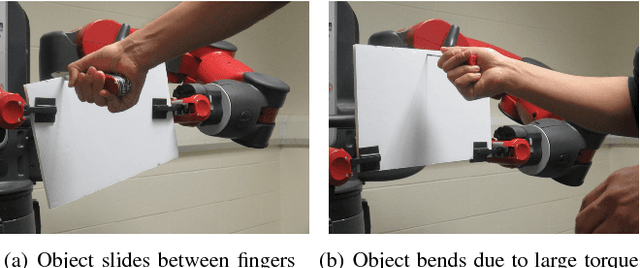
In this work, we present a manipulation planning algorithm for a robot to keep an object stable under changing external forces. We particularly focus on the case where a human may be applying forceful operations, e.g. cutting or drilling, on an object that the robot is holding. The planner produces an efficient plan by intelligently deciding when the robot should change its grasp on the object as the human applies the forces. The planner also tries to choose subsequent grasps such that they will minimize the number of regrasps that will be required in the long-term. Furthermore, as it switches from one grasp to the other, the planner solves the problem of bimanual regrasp planning, where the object is not placed on a support surface, but instead it is held by a single gripper until the second gripper moves to a new position on the object. This requires the planner to also reason about the stability of the object under gravity.We provide an implementation on a bimanual robot and present experiments to show the performance of our planner.