 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeoFIK: A Fast and Reliable Geometric Solver for the IK of the Franka Arm based on Screw Theory Enabling Multiple Redundancy Parameters
Mar 06, 2025Modern robotics applications require an inverse kinematics (IK) solver that is fast, robust and consistent, and that provides all possible solutions. Currently, the Franka robot arm is the most widely used manipulator in robotics research. With 7 DOFs, the IK of this robot is not only complex due to its 1-DOF redundancy, but also due to the link offsets at the wrist and elbow. Due to this complexity, none of the Franka IK solvers available in the literature provide satisfactory results when used in real-world applications. Therefore, in this paper we introduce GeoFIK (Geometric Franka IK), an analytical IK solver that allows the use of different joint variables to resolve the redundancy. The approach uses screw theory to describe the entire geometry of the robot, allowing the computation of the Jacobian matrix prior to computation of joint angles. All singularities are identified and handled. As an example of how the geometric elements obtained by the IK can be exploited, a solver with the swivel angle as the free variable is provided. Several experiments are carried out to validate the speed, robustness and reliability of the GeoFIK against two state-of-the-art solvers.
Deep Movement Primitives: toward Breast Cancer Examination Robot
Feb 14, 2022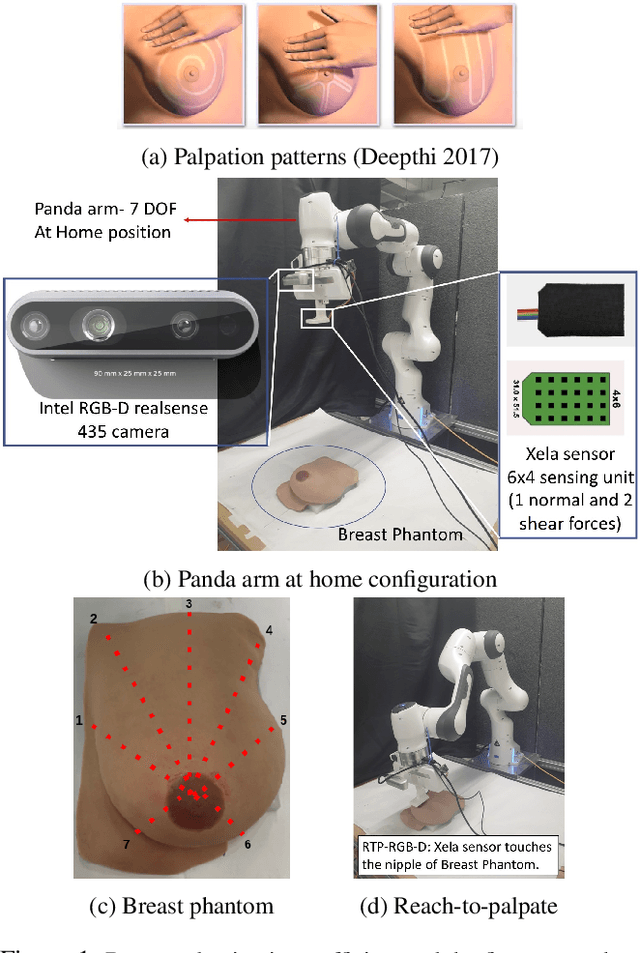
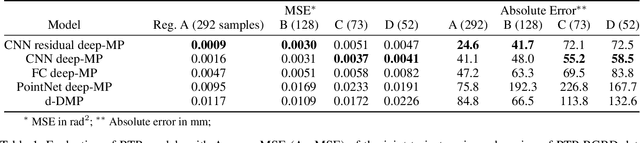
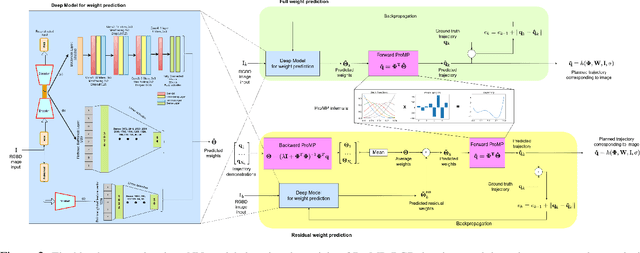
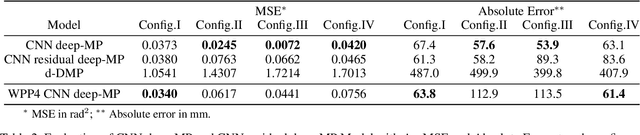
Breast cancer is the most common type of cancer worldwide. A robotic system performing autonomous breast palpation can make a significant impact on the related health sector worldwide. However, robot programming for breast palpating with different geometries is very complex and unsolved. Robot learning from demonstrations (LfD) reduces the programming time and cost. However, the available LfD are lacking the modelling of the manipulation path/trajectory as an explicit function of the visual sensory information. This paper presents a novel approach to manipulation path/trajectory planning called deep Movement Primitives that successfully generates the movements of a manipulator to reach a breast phantom and perform the palpation. We show the effectiveness of our approach by a series of real-robot experiments of reaching and palpating a breast phantom. The experimental results indicate our approach outperforms the state-of-the-art method.