 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNatural Language Robot Programming: NLP integrated with autonomous robotic grasping
Apr 06, 2023In this paper, we present a grammar-based natural language framework for robot programming, specifically for pick-and-place tasks. Our approach uses a custom dictionary of action words, designed to store together words that share meaning, allowing for easy expansion of the vocabulary by adding more action words from a lexical database. We validate our Natural Language Robot Programming (NLRP) framework through simulation and real-world experimentation, using a Franka Panda robotic arm equipped with a calibrated camera-in-hand and a microphone. Participants were asked to complete a pick-and-place task using verbal commands, which were converted into text using Google's Speech-to-Text API and processed through the NLRP framework to obtain joint space trajectories for the robot. Our results indicate that our approach has a high system usability score. The framework's dictionary can be easily extended without relying on transfer learning or large data sets. In the future, we plan to compare the presented framework with different approaches of human-assisted pick-and-place tasks via a comprehensive user study.
Autonomous Strawberry Picking Robotic System (Robofruit)
Jan 10, 2023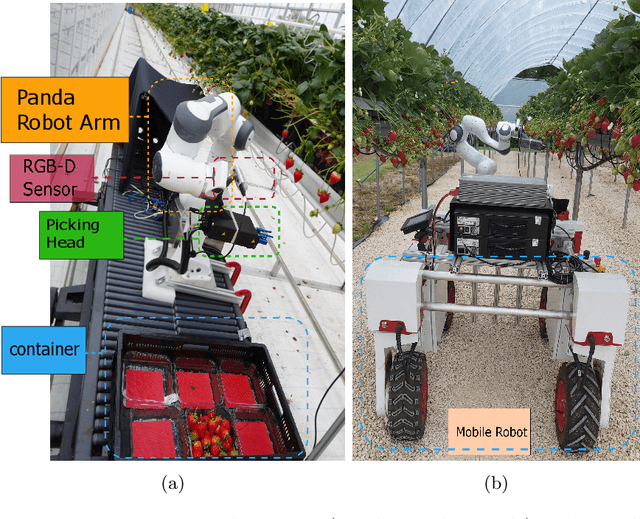
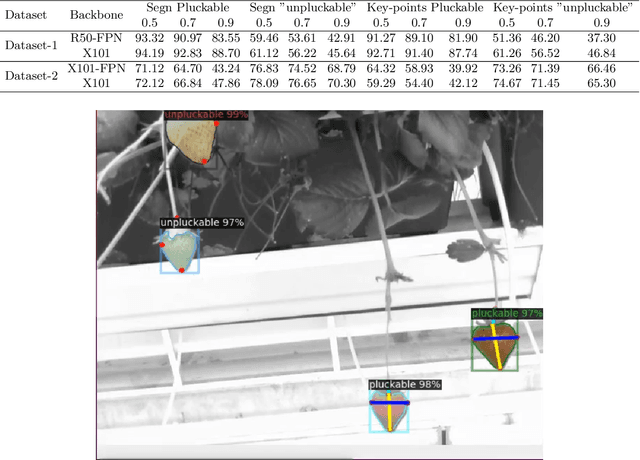
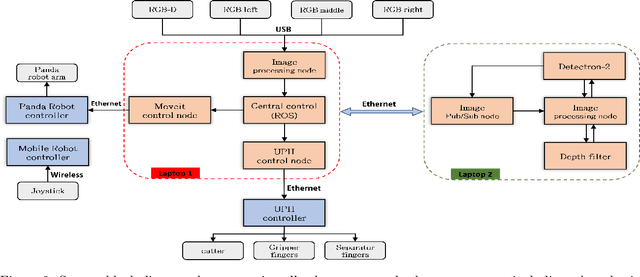
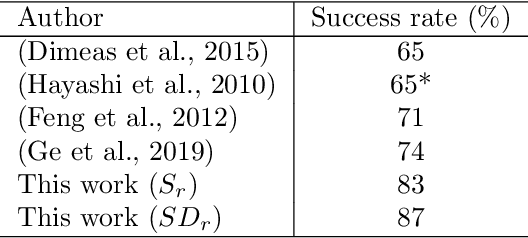
Challenges in strawberry picking made selective harvesting robotic technology demanding. However, selective harvesting of strawberries is complicated forming a few scientific research questions. Most available solutions only deal with a specific picking scenario, e.g., picking only a single variety of fruit in isolation. Nonetheless, most economically viable (e.g. high-yielding and/or disease-resistant) varieties of strawberry are grown in dense clusters. The current perception technology in such use cases is inefficient. In this work, we developed a novel system capable of harvesting strawberries with several unique features. The features allow the system to deal with very complex picking scenarios, e.g. dense clusters. Our concept of a modular system makes our system reconfigurable to adapt to different picking scenarios. We designed, manufactured, and tested a picking head with 2.5 DOF (2 independent mechanisms and 1 dependent cutting system) capable of removing possible occlusions and harvesting targeted strawberries without contacting fruit flesh to avoid damage and bruising. In addition, we developed a novel perception system to localise strawberries and detect their key points, picking points, and determine their ripeness. For this purpose, we introduced two new datasets. Finally, we tested the system in a commercial strawberry growing field and our research farm with three different strawberry varieties. The results show the effectiveness and reliability of the proposed system. The designed picking head was able to remove occlusions and harvest strawberries effectively. The perception system was able to detect and determine the ripeness of strawberries with 95% accuracy. In total, the system was able to harvest 87% of all detected strawberries with a success rate of 83% for all pluckable fruits. We also discuss a series of open research questions in the discussion section.
Deep Movement Primitives: toward Breast Cancer Examination Robot
Feb 14, 2022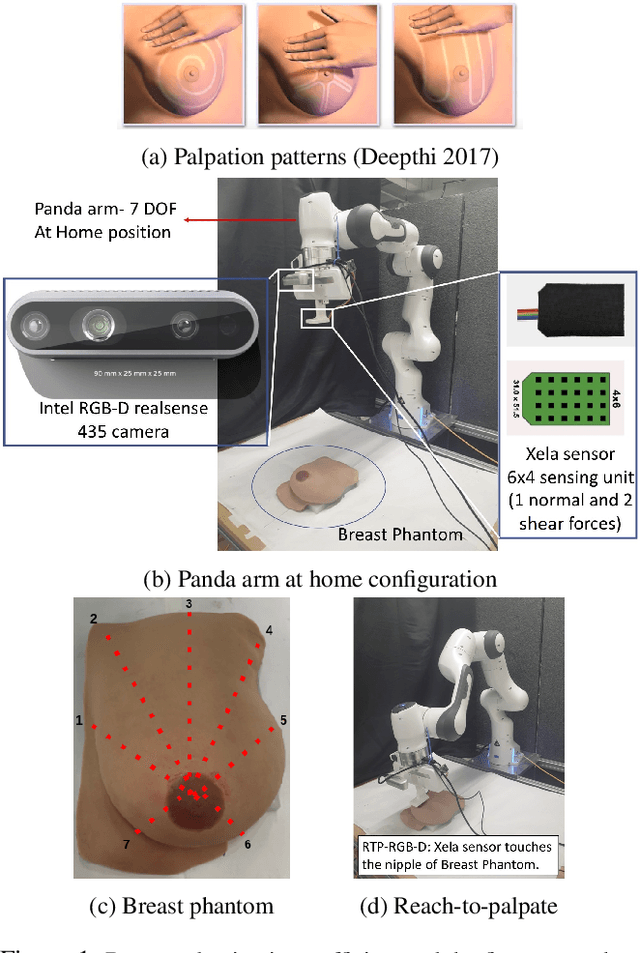
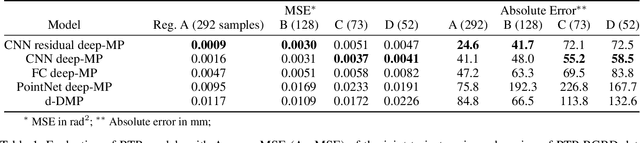
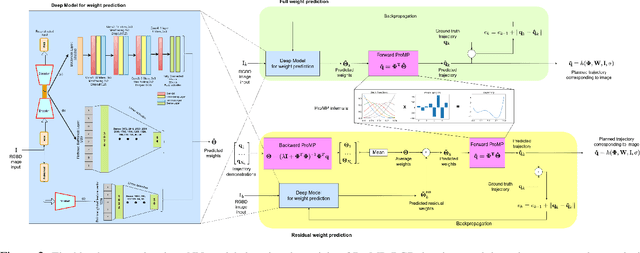
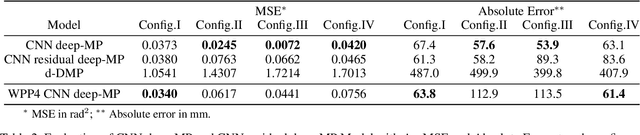
Breast cancer is the most common type of cancer worldwide. A robotic system performing autonomous breast palpation can make a significant impact on the related health sector worldwide. However, robot programming for breast palpating with different geometries is very complex and unsolved. Robot learning from demonstrations (LfD) reduces the programming time and cost. However, the available LfD are lacking the modelling of the manipulation path/trajectory as an explicit function of the visual sensory information. This paper presents a novel approach to manipulation path/trajectory planning called deep Movement Primitives that successfully generates the movements of a manipulator to reach a breast phantom and perform the palpation. We show the effectiveness of our approach by a series of real-robot experiments of reaching and palpating a breast phantom. The experimental results indicate our approach outperforms the state-of-the-art method.