 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Vision and Tactile Sensation for Video Prediction
Apr 21, 2023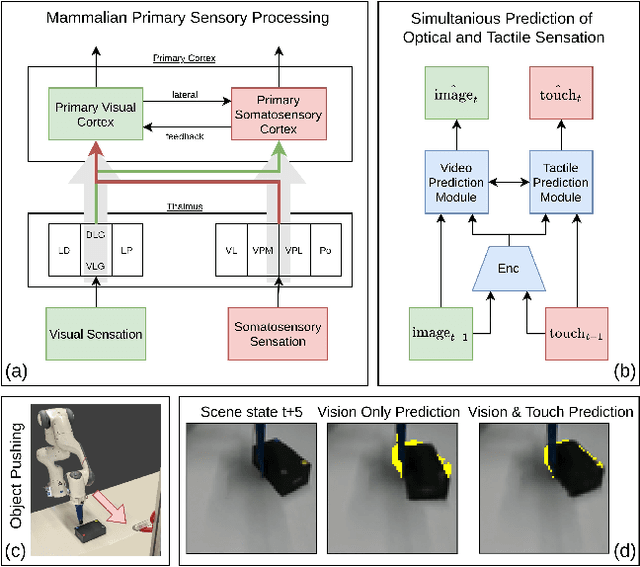
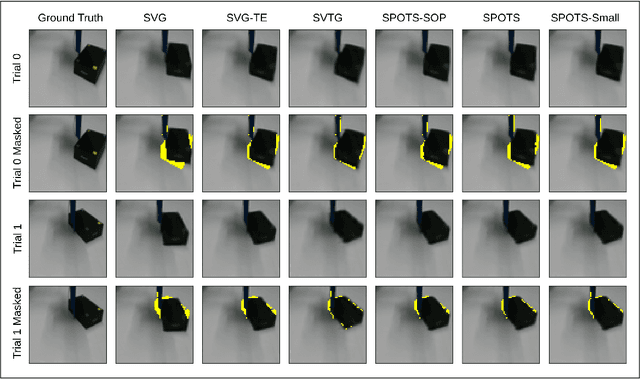
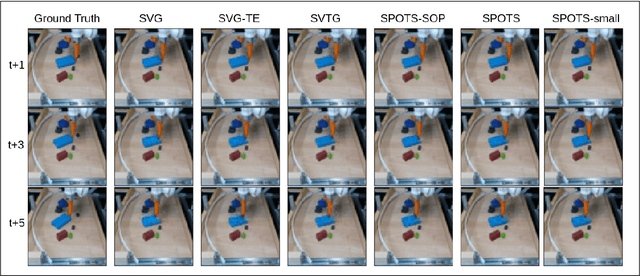
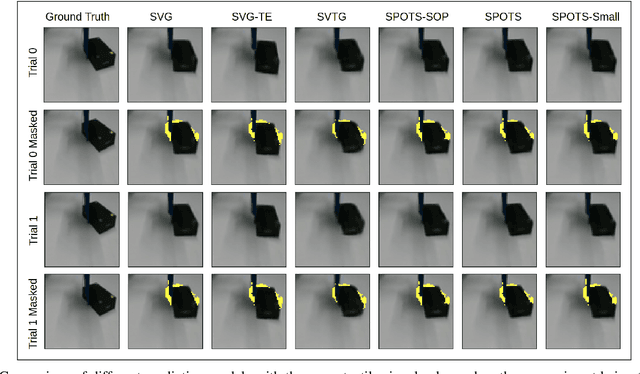
In this paper, we explore the impact of adding tactile sensation to video prediction models for physical robot interactions. Predicting the impact of robotic actions on the environment is a fundamental challenge in robotics. Current methods leverage visual and robot action data to generate video predictions over a given time period, which can then be used to adjust robot actions. However, humans rely on both visual and tactile feedback to develop and maintain a mental model of their physical surroundings. In this paper, we investigate the impact of integrating tactile feedback into video prediction models for physical robot interactions. We propose three multi-modal integration approaches and compare the performance of these tactile-enhanced video prediction models. Additionally, we introduce two new datasets of robot pushing that use a magnetic-based tactile sensor for unsupervised learning. The first dataset contains visually identical objects with different physical properties, while the second dataset mimics existing robot-pushing datasets of household object clusters. Our results demonstrate that incorporating tactile feedback into video prediction models improves scene prediction accuracy and enhances the agent's perception of physical interactions and understanding of cause-effect relationships during physical robot interactions.
Towards Autonomous Selective Harvesting: A Review of Robot Perception, Robot Design, Motion Planning and Control
Apr 19, 2023This paper provides an overview of the current state-of-the-art in selective harvesting robots (SHRs) and their potential for addressing the challenges of global food production. SHRs have the potential to increase productivity, reduce labour costs, and minimise food waste by selectively harvesting only ripe fruits and vegetables. The paper discusses the main components of SHRs, including perception, grasping, cutting, motion planning, and control. It also highlights the challenges in developing SHR technologies, particularly in the areas of robot design, motion planning and control. The paper also discusses the potential benefits of integrating AI and soft robots and data-driven methods to enhance the performance and robustness of SHR systems. Finally, the paper identifies several open research questions in the field and highlights the need for further research and development efforts to advance SHR technologies to meet the challenges of global food production. Overall, this paper provides a starting point for researchers and practitioners interested in developing SHRs and highlights the need for more research in this field.
Natural Language Robot Programming: NLP integrated with autonomous robotic grasping
Apr 06, 2023In this paper, we present a grammar-based natural language framework for robot programming, specifically for pick-and-place tasks. Our approach uses a custom dictionary of action words, designed to store together words that share meaning, allowing for easy expansion of the vocabulary by adding more action words from a lexical database. We validate our Natural Language Robot Programming (NLRP) framework through simulation and real-world experimentation, using a Franka Panda robotic arm equipped with a calibrated camera-in-hand and a microphone. Participants were asked to complete a pick-and-place task using verbal commands, which were converted into text using Google's Speech-to-Text API and processed through the NLRP framework to obtain joint space trajectories for the robot. Our results indicate that our approach has a high system usability score. The framework's dictionary can be easily extended without relying on transfer learning or large data sets. In the future, we plan to compare the presented framework with different approaches of human-assisted pick-and-place tasks via a comprehensive user study.
Learning needle insertion from sample task executions
Mar 14, 2021


Automating a robotic task, e.g., robotic suturing can be very complex and time-consuming. Learning a task model to autonomously perform the task is invaluable making the technology, robotic surgery, accessible for a wider community. The data of robotic surgery can be easily logged where the collected data can be used to learn task models. This will result in reduced time and cost of robotic surgery in which a surgeon can supervise the robot operation or give high-level commands instead of low-level control of the tools. We present a data-set of needle insertion in soft tissue with two arms where Arm 1 inserts the needle into the tissue and Arm 2 actively manipulate the soft tissue to ensure the desired and actual exit points are the same. This is important in real-surgery because suturing without active manipulation of tissue may yield failure of the suturing as the stitch may not grip enough tissue to resist the force applied for the suturing. We present a needle insertion dataset including 60 successful trials recorded by 3 pair of stereo cameras. Moreover, we present Deep-robot Learning from Demonstrations that predicts the desired state of the robot at the time step after t (which the optimal action taken at t yields) by looking at the video of the past time steps, i.e. n step time history where N is the memory time window, of the task execution. The experimental results illustrate our proposed deep model architecture is outperforming the existing methods. Although the solution is not yet ready to be deployed on a real robot, the results indicate the possibility of future development for real robot deployment.