 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning needle insertion from sample task executions
Paper and Code

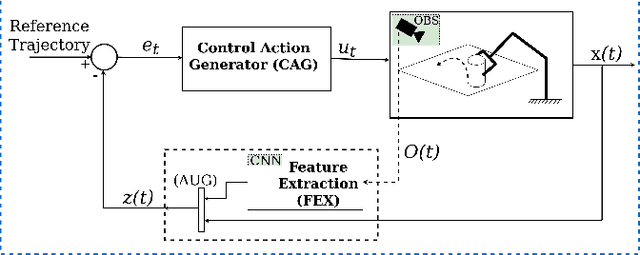


Automating a robotic task, e.g., robotic suturing can be very complex and time-consuming. Learning a task model to autonomously perform the task is invaluable making the technology, robotic surgery, accessible for a wider community. The data of robotic surgery can be easily logged where the collected data can be used to learn task models. This will result in reduced time and cost of robotic surgery in which a surgeon can supervise the robot operation or give high-level commands instead of low-level control of the tools. We present a data-set of needle insertion in soft tissue with two arms where Arm 1 inserts the needle into the tissue and Arm 2 actively manipulate the soft tissue to ensure the desired and actual exit points are the same. This is important in real-surgery because suturing without active manipulation of tissue may yield failure of the suturing as the stitch may not grip enough tissue to resist the force applied for the suturing. We present a needle insertion dataset including 60 successful trials recorded by 3 pair of stereo cameras. Moreover, we present Deep-robot Learning from Demonstrations that predicts the desired state of the robot at the time step after t (which the optimal action taken at t yields) by looking at the video of the past time steps, i.e. n step time history where N is the memory time window, of the task execution. The experimental results illustrate our proposed deep model architecture is outperforming the existing methods. Although the solution is not yet ready to be deployed on a real robot, the results indicate the possibility of future development for real robot deployment.