 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Autonomous Selective Harvesting: A Review of Robot Perception, Robot Design, Motion Planning and Control
Apr 19, 2023This paper provides an overview of the current state-of-the-art in selective harvesting robots (SHRs) and their potential for addressing the challenges of global food production. SHRs have the potential to increase productivity, reduce labour costs, and minimise food waste by selectively harvesting only ripe fruits and vegetables. The paper discusses the main components of SHRs, including perception, grasping, cutting, motion planning, and control. It also highlights the challenges in developing SHR technologies, particularly in the areas of robot design, motion planning and control. The paper also discusses the potential benefits of integrating AI and soft robots and data-driven methods to enhance the performance and robustness of SHR systems. Finally, the paper identifies several open research questions in the field and highlights the need for further research and development efforts to advance SHR technologies to meet the challenges of global food production. Overall, this paper provides a starting point for researchers and practitioners interested in developing SHRs and highlights the need for more research in this field.
Autonomous Strawberry Picking Robotic System (Robofruit)
Jan 10, 2023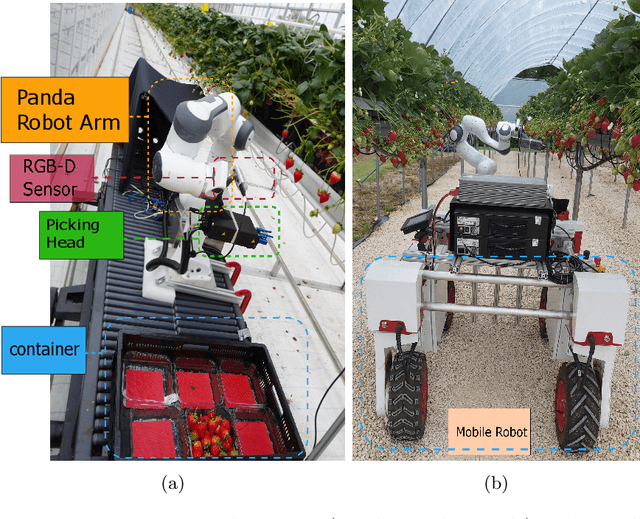
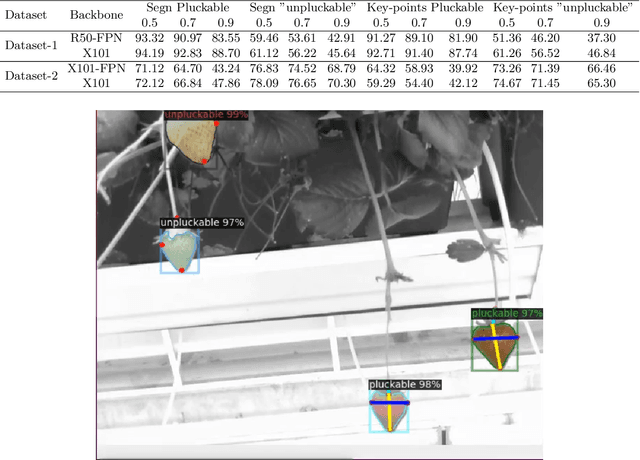
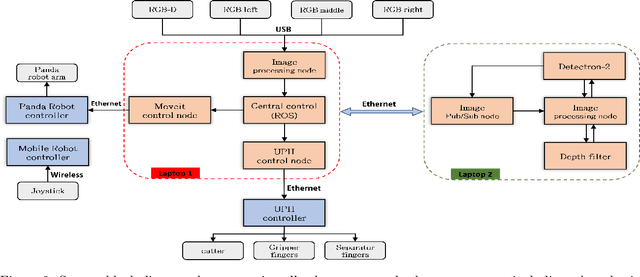
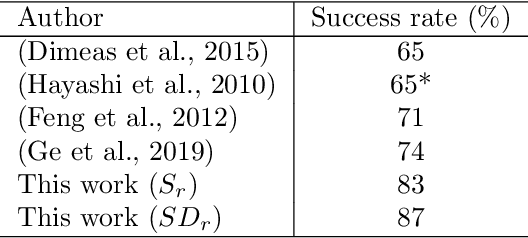
Challenges in strawberry picking made selective harvesting robotic technology demanding. However, selective harvesting of strawberries is complicated forming a few scientific research questions. Most available solutions only deal with a specific picking scenario, e.g., picking only a single variety of fruit in isolation. Nonetheless, most economically viable (e.g. high-yielding and/or disease-resistant) varieties of strawberry are grown in dense clusters. The current perception technology in such use cases is inefficient. In this work, we developed a novel system capable of harvesting strawberries with several unique features. The features allow the system to deal with very complex picking scenarios, e.g. dense clusters. Our concept of a modular system makes our system reconfigurable to adapt to different picking scenarios. We designed, manufactured, and tested a picking head with 2.5 DOF (2 independent mechanisms and 1 dependent cutting system) capable of removing possible occlusions and harvesting targeted strawberries without contacting fruit flesh to avoid damage and bruising. In addition, we developed a novel perception system to localise strawberries and detect their key points, picking points, and determine their ripeness. For this purpose, we introduced two new datasets. Finally, we tested the system in a commercial strawberry growing field and our research farm with three different strawberry varieties. The results show the effectiveness and reliability of the proposed system. The designed picking head was able to remove occlusions and harvest strawberries effectively. The perception system was able to detect and determine the ripeness of strawberries with 95% accuracy. In total, the system was able to harvest 87% of all detected strawberries with a success rate of 83% for all pluckable fruits. We also discuss a series of open research questions in the discussion section.
dPMP-Deep Probabilistic Motion Planning: A use case in Strawberry Picking Robot
Aug 18, 2022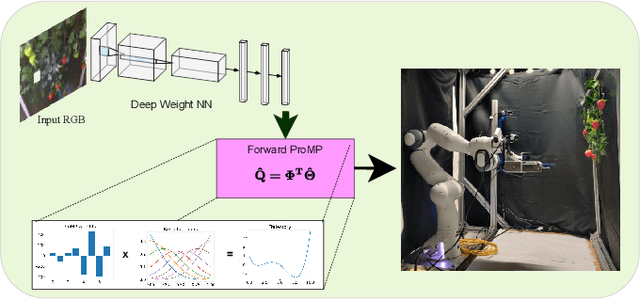
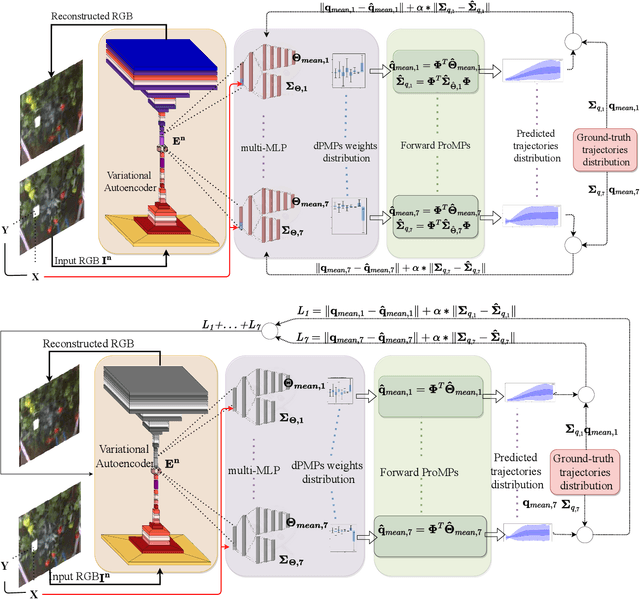
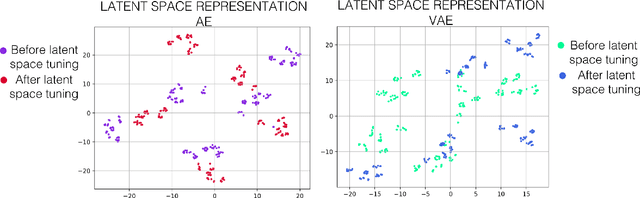
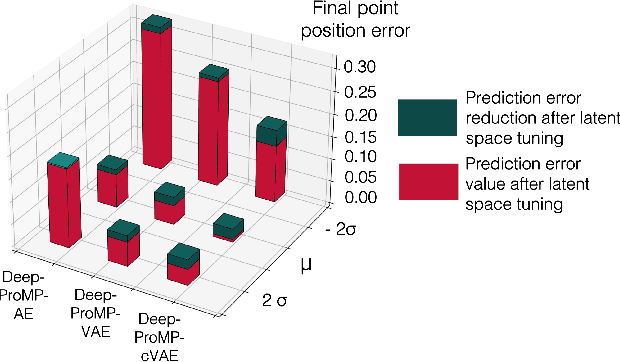
This paper presents a novel probabilistic approach to deep robot learning from demonstrations (LfD). Deep movement primitives (DMPs) are deterministic LfD model that maps visual information directly into a robot trajectory. This paper extends DMPs and presents a deep probabilistic model that maps the visual information into a distribution of effective robot trajectories. The architecture that leads to the highest level of trajectory accuracy is presented and compared with the existing methods. Moreover, this paper introduces a novel training method for learning domain-specific latent features. We show the superiority of the proposed probabilistic approach and novel latent space learning in the lab's real-robot task of strawberry harvesting. The experimental results demonstrate that latent space learning can significantly improve model prediction performances. The proposed approach allows to sample trajectories from distribution and optimises the robot trajectory to meet a secondary objective, e.g. collision avoidance.