 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Acoustic Curvature Sensor: Design and Development
Sep 10, 2024This paper introduces a novel Soft Acoustic Curvature (SAC) sensor. SAC incorporates integrated audio components and features an acoustic channel within a flexible structure. A reference acoustic wave, generated by a speaker at one end of the channel, propagates and is received by a microphone at the other channel's end. Our previous study revealed that acoustic wave energy dissipation varies with acoustic channel deformation, leading us to design a novel channel capable of large deformation due to bending. We then use Machine Learning (ML) models to establish a complex mapping between channel deformations and sound modulation. Various sound frequencies and ML models were evaluated to enhance curvature detection accuracy. The sensor, constructed using soft material and 3D printing, was validated experimentally, with curvature measurement errors remaining within 3.5 m-1 for a range of 0 to 60 m-1 curvatures. These results demonstrate the effectiveness of the proposed method for estimating curvatures. With its flexible structure, the SAC sensor holds potential for applications in soft robotics, including shape measurement for continuum manipulators, soft grippers, and wearable devices.
AST-2: Single and bi-layered 2-D acoustic soft tactile skin
Jan 25, 2024



This paper aims to present an innovative and cost-effective design for Acoustic Soft Tactile (AST) Skin, with the primary goal of significantly enhancing the accuracy of 2-D tactile feature estimation. The existing challenge lies in achieving precise tactile feature estimation, especially concerning contact geometry characteristics, using cost-effective solutions. We hypothesise that by harnessing acoustic energy through dedicated acoustic channels in 2 layers beneath the sensing surface and analysing amplitude modulation, we can effectively decode interactions on the sensory surface, thereby improving tactile feature estimation. Our approach involves the distinct separation of hardware components responsible for emitting and receiving acoustic signals, resulting in a modular and highly customizable skin design. Practical tests demonstrate the effectiveness of this novel design, achieving remarkable precision in estimating contact normal forces (MAE < 0.8 N), 2D contact localisation (MAE < 0.7 mm), and contact surface diameter (MAE < 0.3 mm). In conclusion, the AST skin, with its innovative design and modular architecture, successfully addresses the challenge of tactile feature estimation. The presented results showcase its ability to precisely estimate various tactile features, making it a practical and cost-effective solution for robotic applications.
Acoustic Soft Tactile Skin (AST Skin)
Mar 30, 2023



Acoustic Soft Tactile (AST) skin is a novel soft-flexible, low-cost sensor that can measure static normal forces and their contact location. This letter presents the design, fabrication, and experimental evaluation of AST skin. The proposed AST skin has some Acoustic channels(s) (ACs) arranged in parallel below the sensing surface. A reference acoustic wave from a speaker unit propagates through these ACs. The deformation of ACs under the contact force modulates the acoustic waves, and the change in modulation recorded by a microphone is used to measure the force magnitude and the location of the action. We used a static force calibration method to validate the performance of the AST skin. Our two best AST configurations are capable of (i) making more than 93% of their force measurements within $\pm$ 1.5 N tolerances for a range of 0-30 N and (ii) predicting contact locations with more than 96% accuracy. Furthermore, we conducted a robotic pushing experiment with the AST skin and an off-the-shelf Xela uSkin sensor, which showed that the AST skin outperformed the Xela sensor in measuring the interaction forces. With further developments, the proposed AST skin has the potential to be used for various robotic tasks such as object grasping and manipulation.
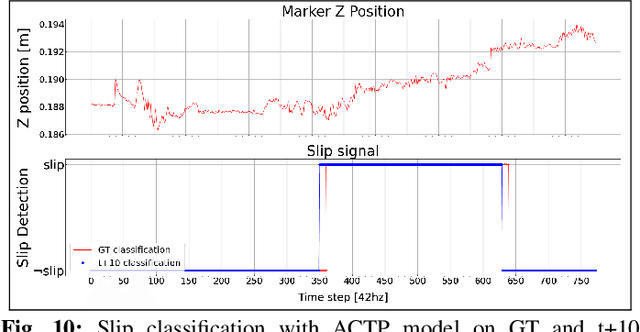
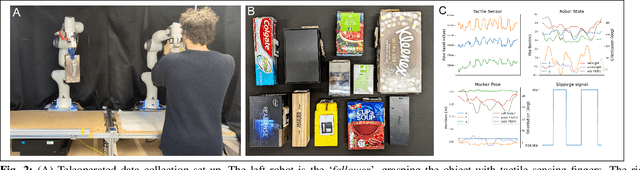
Proactive slip control by learned slip model and trajectory adaptation
Sep 13, 2022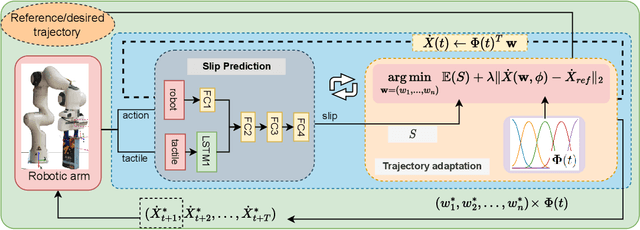
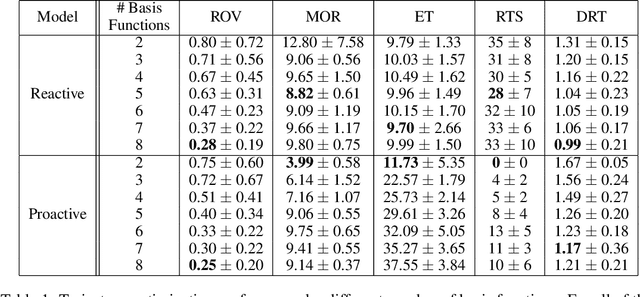
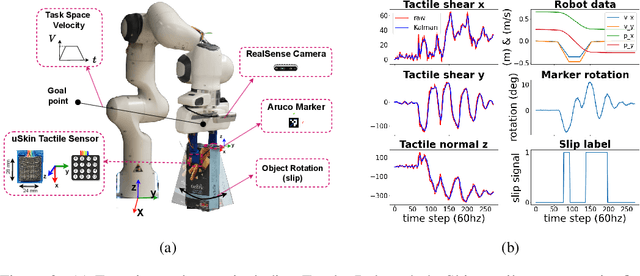
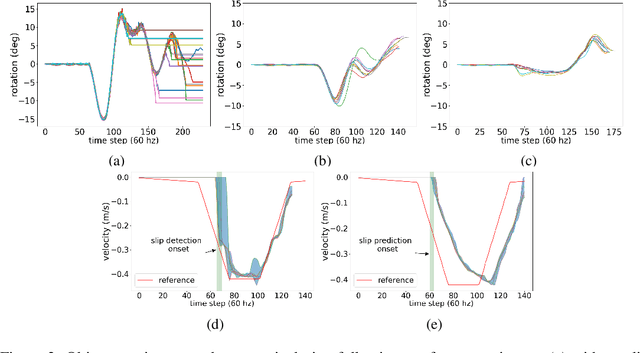
This paper presents a novel control approach to dealing with object slip during robotic manipulative movements. Slip is a major cause of failure in many robotic grasping and manipulation tasks. Existing works increase grip force to avoid/control slip. However, this may not be feasible when (i) the robot cannot increase the gripping force -- the max gripping force is already applied or (ii) increased force damages the grasped object, such as soft fruit. Moreover, the robot fixes the gripping force when it forms a stable grasp on the surface of an object, and changing the gripping force during real-time manipulation may not be an effective control policy. We propose a novel control approach to slip avoidance including a learned action-conditioned slip predictor and a constrained optimiser avoiding a predicted slip given a desired robot action. We show the effectiveness of the proposed trajectory adaptation method with receding horizon controller with a series of real-robot test cases. Our experimental results show our proposed data-driven predictive controller can control slip for objects unseen in training.
dPMP-Deep Probabilistic Motion Planning: A use case in Strawberry Picking Robot
Aug 18, 2022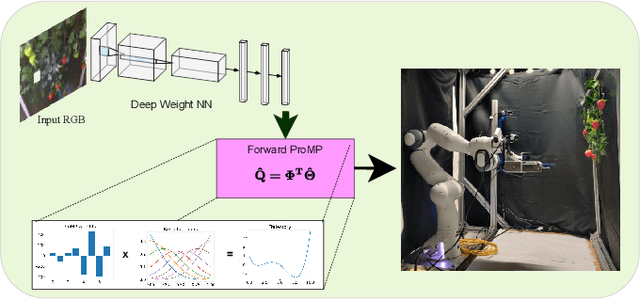
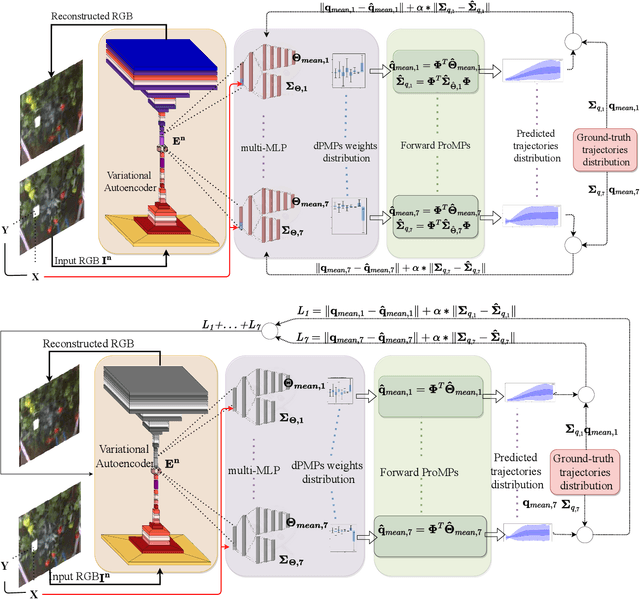
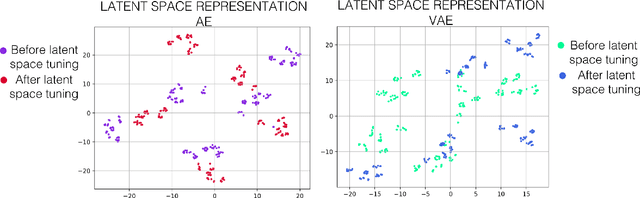
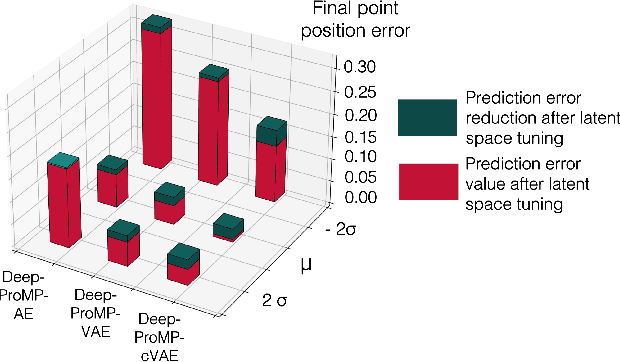
This paper presents a novel probabilistic approach to deep robot learning from demonstrations (LfD). Deep movement primitives (DMPs) are deterministic LfD model that maps visual information directly into a robot trajectory. This paper extends DMPs and presents a deep probabilistic model that maps the visual information into a distribution of effective robot trajectories. The architecture that leads to the highest level of trajectory accuracy is presented and compared with the existing methods. Moreover, this paper introduces a novel training method for learning domain-specific latent features. We show the superiority of the proposed probabilistic approach and novel latent space learning in the lab's real-robot task of strawberry harvesting. The experimental results demonstrate that latent space learning can significantly improve model prediction performances. The proposed approach allows to sample trajectories from distribution and optimises the robot trajectory to meet a secondary objective, e.g. collision avoidance.
Action Conditioned Tactile Prediction: a case study on slip prediction
May 19, 2022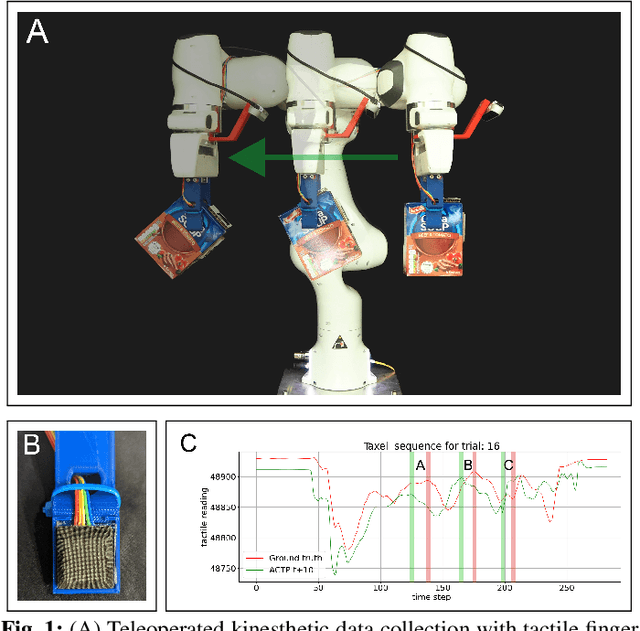

Tactile predictive models can be useful across several robotic manipulation tasks, e.g. robotic pushing, robotic grasping, slip avoidance, and in-hand manipulation. However, available tactile prediction models are mostly studied for image-based tactile sensors and there is no comparison study indicating the best performing models. In this paper, we presented two novel data-driven action-conditioned models for predicting tactile signals during real-world physical robot interaction tasks (1) action condition tactile prediction and (2) action conditioned tactile-video prediction models. We use a magnetic-based tactile sensor that is challenging to analyse and test state-of-the-art predictive models and the only existing bespoke tactile prediction model. We compare the performance of these models with those of our proposed models. We perform the comparison study using our novel tactile enabled dataset containing 51,000 tactile frames of a real-world robotic manipulation task with 11 flat-surfaced household objects. Our experimental results demonstrate the superiority of our proposed tactile prediction models in terms of qualitative, quantitative and slip prediction scores.
Planning Actions by Interactive Movement Primitives: pushing occluding pieces to pick a ripe fruit
Apr 27, 2020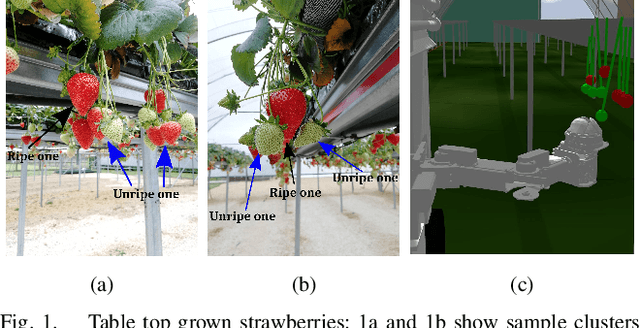
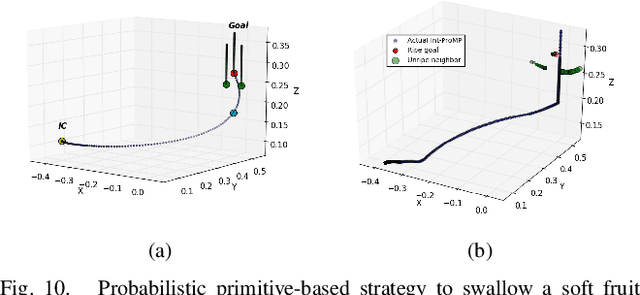
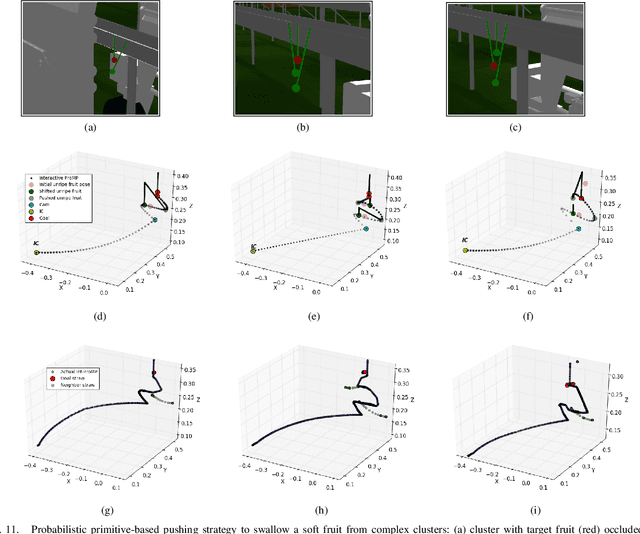

While many efforts are currently devoted by research bodies to investigate in robot harvesting, challenges related to picking fruits from clusters are still considered an open issue which can limit the operation success. On the other hand, existing planning frameworks for robotic manipulation in cluttered and uncertain environment are getting more and more attention for their ability to deal with physics-based strategies to free the robot path to a goal object. However, those approaches are either computationally expensive and/or designed for 2-D occlusion scenes. Consequently, they are not readily applicable to the complex 3-D geometry of fruits in clusters. In this work, we present a path planning algorithm for pushing occluding fruits to reach-and-pick a ripe one. Hence, we propose an Interactive Probabilistic Movement Primitives (I-ProMP) which is computationally efficient and is readily used for 3-D problems. We demonstrate the efficiency of our approach with pushing unripe strawberries in a simulated polytunnel. Our experimental results confirm I- ProMP successfully pushes table top grown strawberries and reaches a ripe one.