 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Boundary Loss for the Hierarchical Panoptic Segmentation of Plants and Leaves
Dec 31, 2024



Precision agriculture leverages data and machine learning so that farmers can monitor their crops and target interventions precisely. This enables the precision application of herbicide only to weeds, or the precision application of fertilizer only to undernourished crops, rather than to the entire field. The approach promises to maximize yields while minimizing resource use and harm to the surrounding environment. To this end, we propose a hierarchical panoptic segmentation method that simultaneously determines leaf count (as an identifier of plant growth)and locates weeds within an image. In particular, our approach aims to improve the segmentation of smaller instances like the leaves and weeds by incorporating focal loss and boundary loss. Not only does this result in competitive performance, achieving a PQ+ of 81.89 on the standard training set, but we also demonstrate we can improve leaf-counting accuracy with our method. The code is available at https://github.com/madeleinedarbyshire/HierarchicalMask2Former.
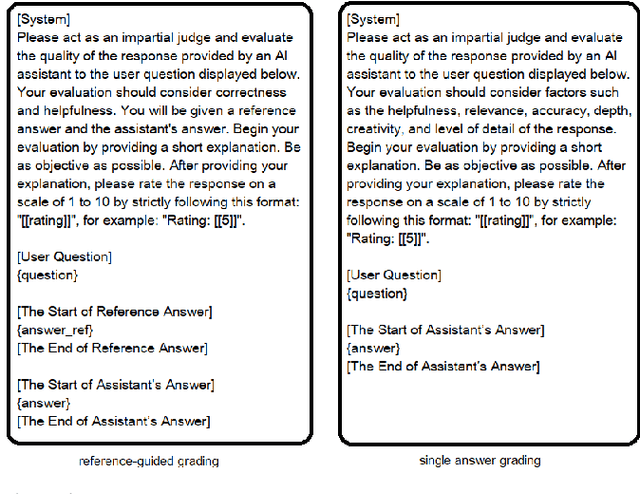
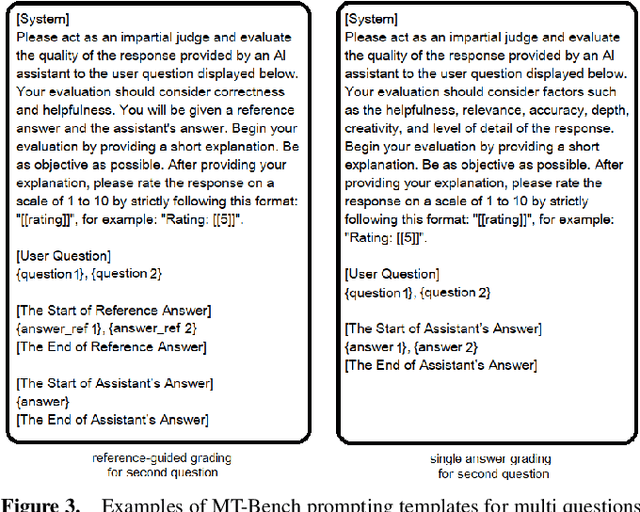
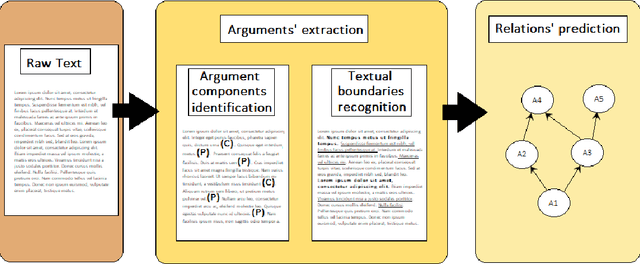
Critical-Questions-of-Thought: Steering LLM reasoning with Argumentative Querying
Dec 19, 2024Studies have underscored how, regardless of the recent breakthrough and swift advances in AI research, even state-of-the-art Large Language models (LLMs) continue to struggle when performing logical and mathematical reasoning. The results seem to suggest that LLMs still work as (highly advanced) data pattern identifiers, scoring poorly when attempting to generalise and solve reasoning problems the models have never previously seen or that are not close to samples presented in their training data. To address this compelling concern, this paper makes use of the notion of critical questions from the literature on argumentation theory, focusing in particular on Toulmin's model of argumentation. We show that employing these critical questions can improve the reasoning capabilities of LLMs. By probing the rationale behind the models' reasoning process, the LLM can assess whether some logical mistake is occurring and correct it before providing the final reply to the user prompt. The underlying idea is drawn from the gold standard of any valid argumentative procedure: the conclusion is valid if it is entailed by accepted premises. Or, to paraphrase such Aristotelian principle in a real-world approximation, characterised by incomplete information and presumptive logic, the conclusion is valid if not proved otherwise. This approach successfully steers the models' output through a reasoning pipeline, resulting in better performance against the baseline and its Chain-of-Thought (CoT) implementation. To this end, an extensive evaluation of the proposed approach on the MT-Bench Reasoning and Math tasks across a range of LLMs is provided.
Enabling Tactile Feedback for Robotic Strawberry Handling using AST Skin
Jul 01, 2024



Acoustic Soft Tactile (AST) skin is a novel sensing technology which derives tactile information from the modulation of acoustic waves travelling through the skin's embedded acoustic channels. A generalisable data-driven calibration model maps the acoustic modulations to the corresponding tactile information in the form of contact forces with their contact locations and contact geometries. AST skin technology has been highlighted for its easy customisation. As a case study, this paper discusses the possibility of using AST skin on a custom-built robotic end effector finger for strawberry handling. The paper delves into the design, prototyping, and calibration method to sensorise the end effector finger with AST skin. A real-time force-controlled gripping experiment is conducted with the sensorised finger to handle strawberries by their peduncle. The finger could successfully grip the strawberry peduncle by maintaining a preset force of 2 N with a maximum Mean Absolute Error (MAE) of 0.31 N over multiple peduncle diameters and strawberry weight classes. Moreover, this study sets confidence in the usability of AST skin in generating real-time tactile feedback for robot manipulation tasks.
Can formal argumentative reasoning enhance LLMs performances?
May 16, 2024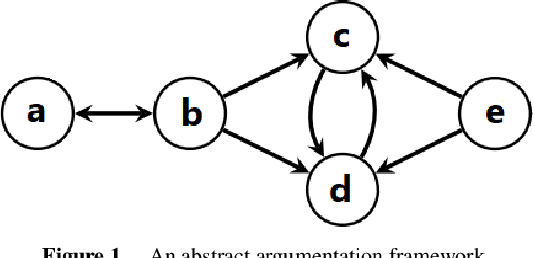

Recent years witnessed significant performance advancements in deep-learning-driven natural language models, with a strong focus on the development and release of Large Language Models (LLMs). These improvements resulted in better quality AI-generated output but rely on resource-expensive training and upgrading of models. Although different studies have proposed a range of techniques to enhance LLMs without retraining, none have considered computational argumentation as an option. This is a missed opportunity since computational argumentation is an intuitive mechanism that formally captures agents' interactions and the information conflict that may arise during such interplays, and so it seems well-suited for boosting the reasoning and conversational abilities of LLMs in a seamless manner. In this paper, we present a pipeline (MQArgEng) and preliminary study to evaluate the effect of introducing computational argumentation semantics on the performance of LLMs. Our experiment's goal was to provide a proof-of-concept and a feasibility analysis in order to foster (or deter) future research towards a fully-fledged argumentation engine plugin for LLMs. Exploratory results using the MT-Bench indicate that MQArgEng provides a moderate performance gain in most of the examined topical categories and, as such, show promise and warrant further research.
Multispectral Fine-Grained Classification of Blackgrass in Wheat and Barley Crops
May 03, 2024

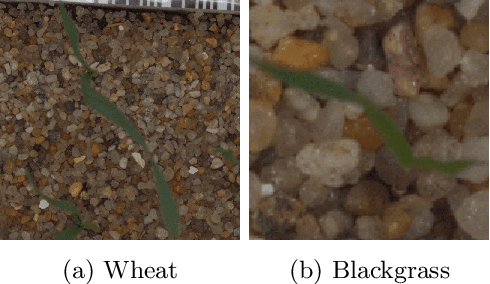

As the burden of herbicide resistance grows and the environmental repercussions of excessive herbicide use become clear, new ways of managing weed populations are needed. This is particularly true for cereal crops, like wheat and barley, that are staple food crops and occupy a globally significant portion of agricultural land. Even small improvements in weed management practices across these major food crops worldwide would yield considerable benefits for both the environment and global food security. Blackgrass is a major grass weed which causes particular problems in cereal crops in north-west Europe, a major cereal production area, because it has high levels of of herbicide resistance and is well adapted to agronomic practice in this region. With the use of machine vision and multispectral imaging, we investigate the effectiveness of state-of-the-art methods to identify blackgrass in wheat and barley crops. As part of this work, we provide a large dataset with which we evaluate several key aspects of blackgrass weed recognition. Firstly, we determine the performance of different CNN and transformer-based architectures on images from unseen fields. Secondly, we demonstrate the role that different spectral bands have on the performance of weed classification. Lastly, we evaluate the role of dataset size in classification performance for each of the models trialled. We find that even with a fairly modest quantity of training data an accuracy of almost 90% can be achieved on images from unseen fields.
AST-2: Single and bi-layered 2-D acoustic soft tactile skin
Jan 25, 2024



This paper aims to present an innovative and cost-effective design for Acoustic Soft Tactile (AST) Skin, with the primary goal of significantly enhancing the accuracy of 2-D tactile feature estimation. The existing challenge lies in achieving precise tactile feature estimation, especially concerning contact geometry characteristics, using cost-effective solutions. We hypothesise that by harnessing acoustic energy through dedicated acoustic channels in 2 layers beneath the sensing surface and analysing amplitude modulation, we can effectively decode interactions on the sensory surface, thereby improving tactile feature estimation. Our approach involves the distinct separation of hardware components responsible for emitting and receiving acoustic signals, resulting in a modular and highly customizable skin design. Practical tests demonstrate the effectiveness of this novel design, achieving remarkable precision in estimating contact normal forces (MAE < 0.8 N), 2D contact localisation (MAE < 0.7 mm), and contact surface diameter (MAE < 0.3 mm). In conclusion, the AST skin, with its innovative design and modular architecture, successfully addresses the challenge of tactile feature estimation. The presented results showcase its ability to precisely estimate various tactile features, making it a practical and cost-effective solution for robotic applications.
Computational Argumentation-based Chatbots: a Survey
Jan 07, 2024


Chatbots are conversational software applications designed to interact dialectically with users for a plethora of different purposes. Surprisingly, these colloquial agents have only recently been coupled with computational models of arguments (i.e. computational argumentation), whose aim is to formalise, in a machine-readable format, the ordinary exchange of information that characterises human communications. Chatbots may employ argumentation with different degrees and in a variety of manners. The present survey sifts through the literature to review papers concerning this kind of argumentation-based bot, drawing conclusions about the benefits and drawbacks that this approach entails in comparison with standard chatbots, while also envisaging possible future development and integration with the Transformer-based architecture and state-of-the-art Large Language models.
Hierarchical Mask2Former: Panoptic Segmentation of Crops, Weeds and Leaves
Oct 10, 2023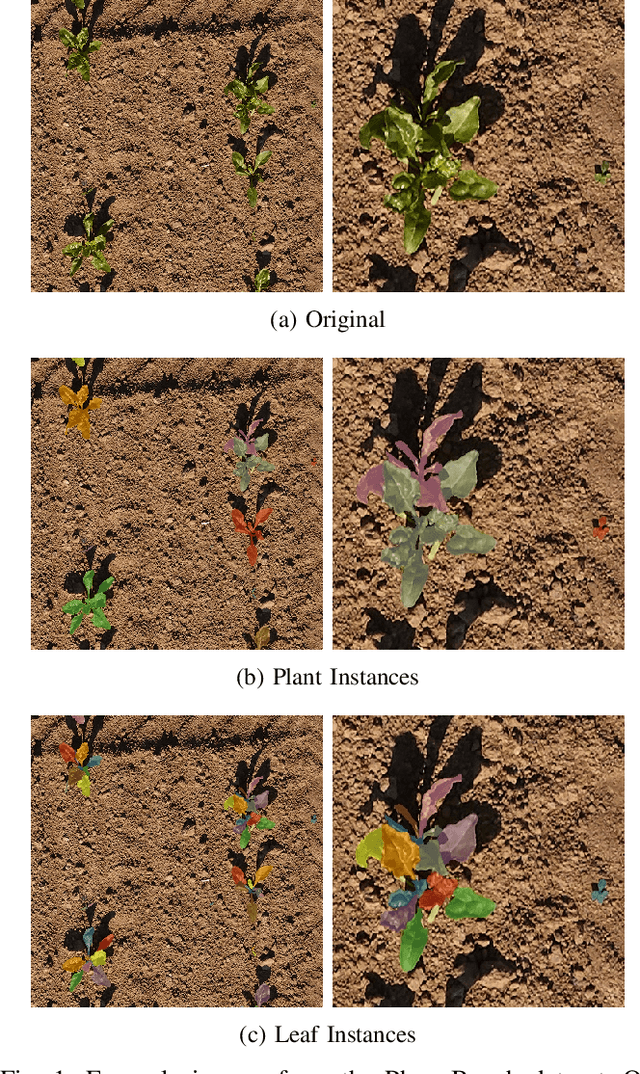
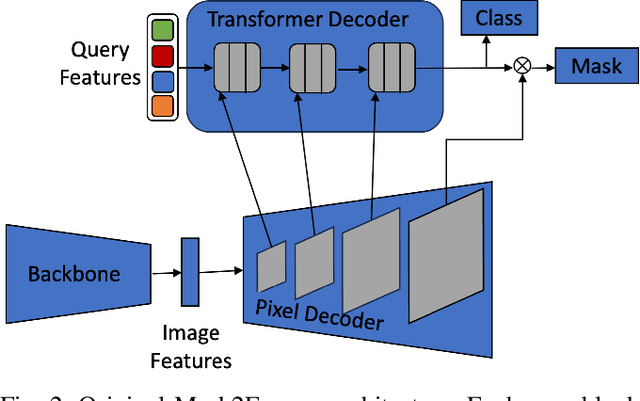
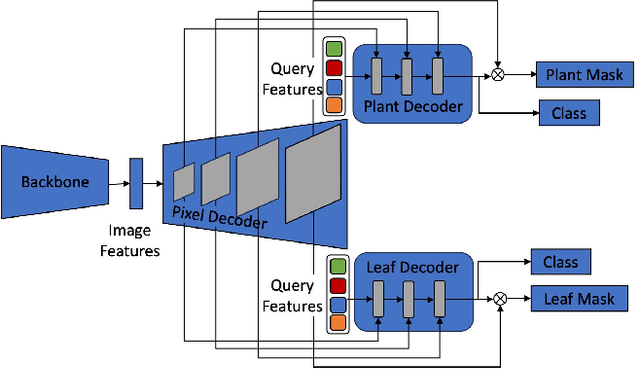
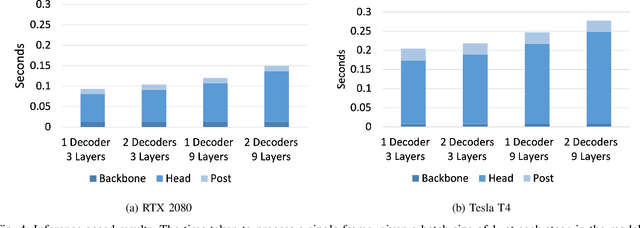
Advancements in machine vision that enable detailed inferences to be made from images have the potential to transform many sectors including agriculture. Precision agriculture, where data analysis enables interventions to be precisely targeted, has many possible applications. Precision spraying, for example, can limit the application of herbicide only to weeds, or limit the application of fertiliser only to undernourished crops, instead of spraying the entire field. The approach promises to maximise yields, whilst minimising resource use and harms to the surrounding environment. To this end, we propose a hierarchical panoptic segmentation method to simultaneously identify indicators of plant growth and locate weeds within an image. We adapt Mask2Former, a state-of-the-art architecture for panoptic segmentation, to predict crop, weed and leaf masks. We achieve a PQ{\dag} of 75.99. Additionally, we explore approaches to make the architecture more compact and therefore more suitable for time and compute constrained applications. With our more compact architecture, inference is up to 60% faster and the reduction in PQ{\dag} is less than 1%.
Towards Autonomous Selective Harvesting: A Review of Robot Perception, Robot Design, Motion Planning and Control
Apr 19, 2023This paper provides an overview of the current state-of-the-art in selective harvesting robots (SHRs) and their potential for addressing the challenges of global food production. SHRs have the potential to increase productivity, reduce labour costs, and minimise food waste by selectively harvesting only ripe fruits and vegetables. The paper discusses the main components of SHRs, including perception, grasping, cutting, motion planning, and control. It also highlights the challenges in developing SHR technologies, particularly in the areas of robot design, motion planning and control. The paper also discusses the potential benefits of integrating AI and soft robots and data-driven methods to enhance the performance and robustness of SHR systems. Finally, the paper identifies several open research questions in the field and highlights the need for further research and development efforts to advance SHR technologies to meet the challenges of global food production. Overall, this paper provides a starting point for researchers and practitioners interested in developing SHRs and highlights the need for more research in this field.
Peduncle Gripping and Cutting Force for Strawberry Harvesting Robotic End-effector Design
Jul 25, 2022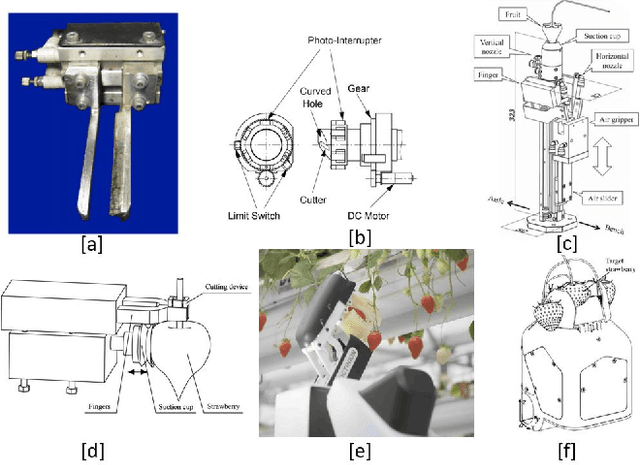
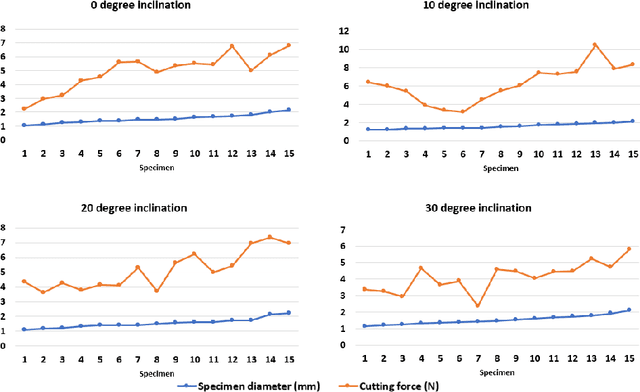
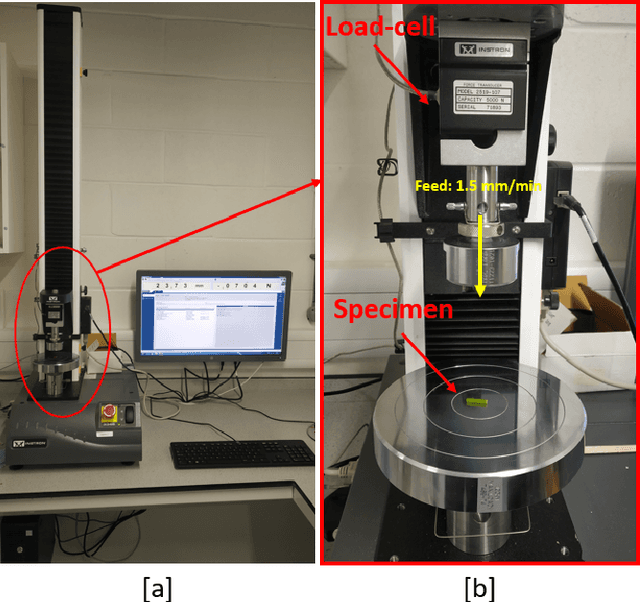
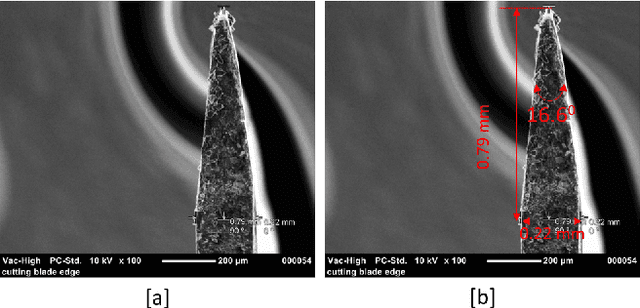
Robotic harvesting of strawberries has gained much interest in the recent past. Although there are many innovations, they haven't yet reached a level that is comparable to an expert human picker. The end effector unit plays a major role in defining the efficiency of such a robotic harvesting system. Even though there are reports on various end effectors for strawberry harvesting, but there they lack a picture of certain parameters that the researchers can rely upon to develop new end effectors. These parameters include the limit of gripping force that can be applied on the peduncle for effective gripping, the force required to cut the strawberry peduncle, etc. These estimations would be helpful in the design cycle of the end effectors that target to grip and cut the strawberry peduncle during the harvesting action. This paper studies the estimation and analysis of these parameters experimentally. It has been estimated that the peduncle gripping force can be limited to 10 N. This enables an end effector to grip a strawberry of mass up to 50 grams with a manipulation acceleration of 50 m/s$^2$ without squeezing the peduncle. The study on peduncle cutting force reveals that a force of 15 N is sufficient to cut a strawberry peduncle using a blade with a wedge angle of 16.6 degrees at a 30-degree orientation.