 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Perception in Agri-food Manipulation: A Review
Aug 22, 2022
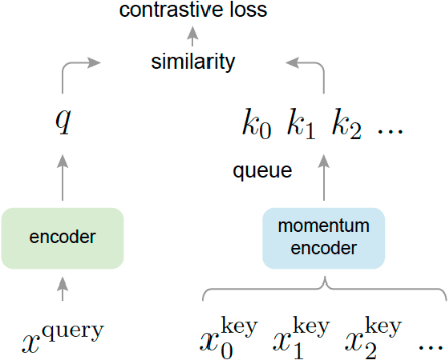


To better optimise the global food supply chain, robotic solutions are needed to automate tasks currently completed by humans. Namely, phenotyping, quality analysis and harvesting are all open problems in the field of agricultural robotics. Robotic perception is a key challenge for autonomous solutions to such problems as scene understanding and object detection are vital prerequisites to any grasping tasks that a robot may undertake. This work conducts a brief review of modern robot perception models and discusses their efficacy within the agri-food domain.
Peduncle Gripping and Cutting Force for Strawberry Harvesting Robotic End-effector Design
Jul 25, 2022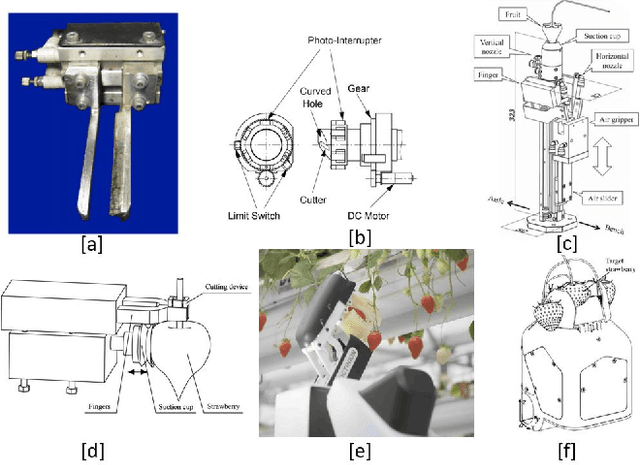
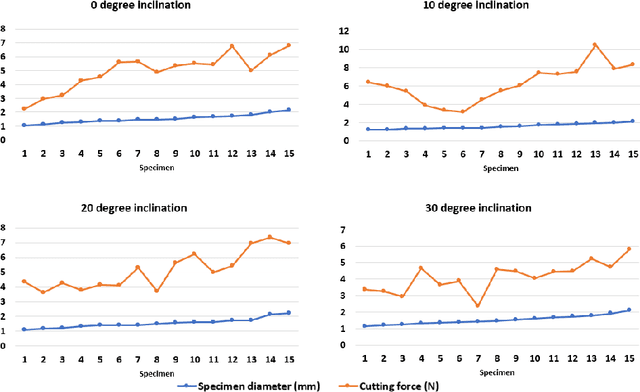
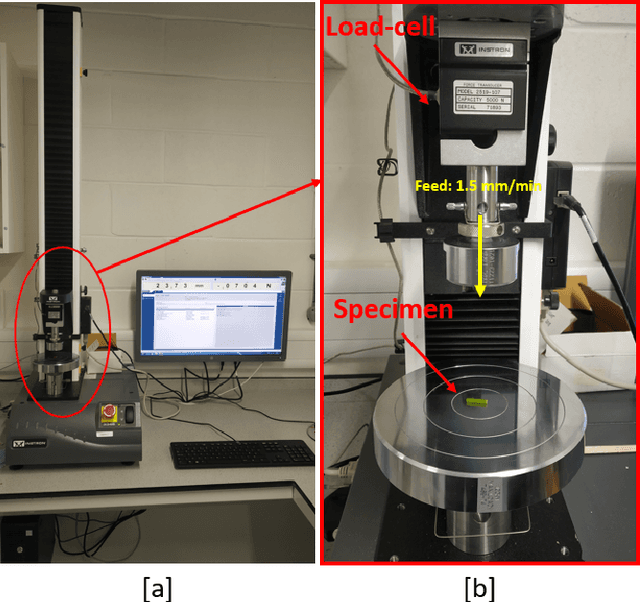
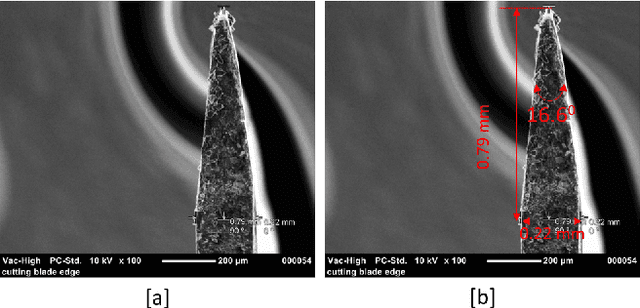
Robotic harvesting of strawberries has gained much interest in the recent past. Although there are many innovations, they haven't yet reached a level that is comparable to an expert human picker. The end effector unit plays a major role in defining the efficiency of such a robotic harvesting system. Even though there are reports on various end effectors for strawberry harvesting, but there they lack a picture of certain parameters that the researchers can rely upon to develop new end effectors. These parameters include the limit of gripping force that can be applied on the peduncle for effective gripping, the force required to cut the strawberry peduncle, etc. These estimations would be helpful in the design cycle of the end effectors that target to grip and cut the strawberry peduncle during the harvesting action. This paper studies the estimation and analysis of these parameters experimentally. It has been estimated that the peduncle gripping force can be limited to 10 N. This enables an end effector to grip a strawberry of mass up to 50 grams with a manipulation acceleration of 50 m/s$^2$ without squeezing the peduncle. The study on peduncle cutting force reveals that a force of 15 N is sufficient to cut a strawberry peduncle using a blade with a wedge angle of 16.6 degrees at a 30-degree orientation.