 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Acoustic Curvature Sensor: Design and Development
Sep 10, 2024This paper introduces a novel Soft Acoustic Curvature (SAC) sensor. SAC incorporates integrated audio components and features an acoustic channel within a flexible structure. A reference acoustic wave, generated by a speaker at one end of the channel, propagates and is received by a microphone at the other channel's end. Our previous study revealed that acoustic wave energy dissipation varies with acoustic channel deformation, leading us to design a novel channel capable of large deformation due to bending. We then use Machine Learning (ML) models to establish a complex mapping between channel deformations and sound modulation. Various sound frequencies and ML models were evaluated to enhance curvature detection accuracy. The sensor, constructed using soft material and 3D printing, was validated experimentally, with curvature measurement errors remaining within 3.5 m-1 for a range of 0 to 60 m-1 curvatures. These results demonstrate the effectiveness of the proposed method for estimating curvatures. With its flexible structure, the SAC sensor holds potential for applications in soft robotics, including shape measurement for continuum manipulators, soft grippers, and wearable devices.
Towards Autonomous Selective Harvesting: A Review of Robot Perception, Robot Design, Motion Planning and Control
Apr 19, 2023This paper provides an overview of the current state-of-the-art in selective harvesting robots (SHRs) and their potential for addressing the challenges of global food production. SHRs have the potential to increase productivity, reduce labour costs, and minimise food waste by selectively harvesting only ripe fruits and vegetables. The paper discusses the main components of SHRs, including perception, grasping, cutting, motion planning, and control. It also highlights the challenges in developing SHR technologies, particularly in the areas of robot design, motion planning and control. The paper also discusses the potential benefits of integrating AI and soft robots and data-driven methods to enhance the performance and robustness of SHR systems. Finally, the paper identifies several open research questions in the field and highlights the need for further research and development efforts to advance SHR technologies to meet the challenges of global food production. Overall, this paper provides a starting point for researchers and practitioners interested in developing SHRs and highlights the need for more research in this field.
Acoustic Soft Tactile Skin (AST Skin)
Mar 30, 2023



Acoustic Soft Tactile (AST) skin is a novel soft-flexible, low-cost sensor that can measure static normal forces and their contact location. This letter presents the design, fabrication, and experimental evaluation of AST skin. The proposed AST skin has some Acoustic channels(s) (ACs) arranged in parallel below the sensing surface. A reference acoustic wave from a speaker unit propagates through these ACs. The deformation of ACs under the contact force modulates the acoustic waves, and the change in modulation recorded by a microphone is used to measure the force magnitude and the location of the action. We used a static force calibration method to validate the performance of the AST skin. Our two best AST configurations are capable of (i) making more than 93% of their force measurements within $\pm$ 1.5 N tolerances for a range of 0-30 N and (ii) predicting contact locations with more than 96% accuracy. Furthermore, we conducted a robotic pushing experiment with the AST skin and an off-the-shelf Xela uSkin sensor, which showed that the AST skin outperformed the Xela sensor in measuring the interaction forces. With further developments, the proposed AST skin has the potential to be used for various robotic tasks such as object grasping and manipulation.
Peduncle Gripping and Cutting Force for Strawberry Harvesting Robotic End-effector Design
Jul 25, 2022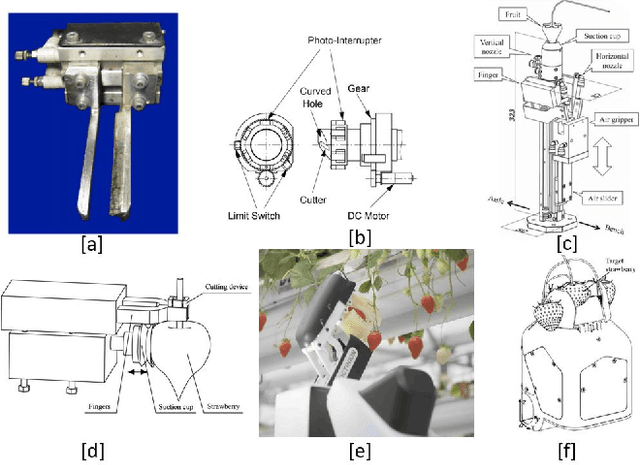
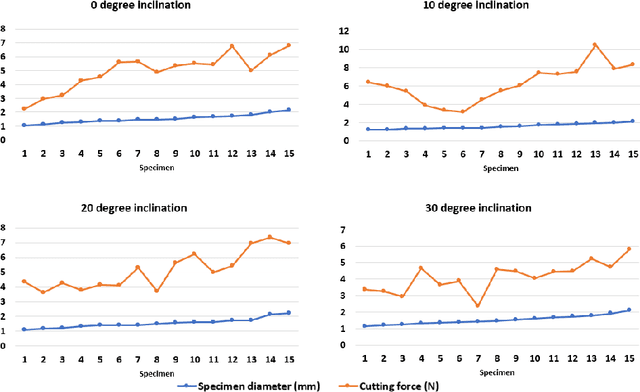
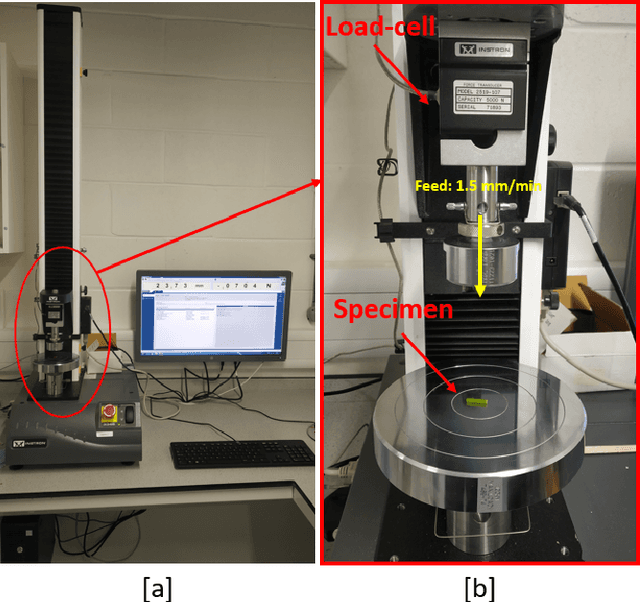
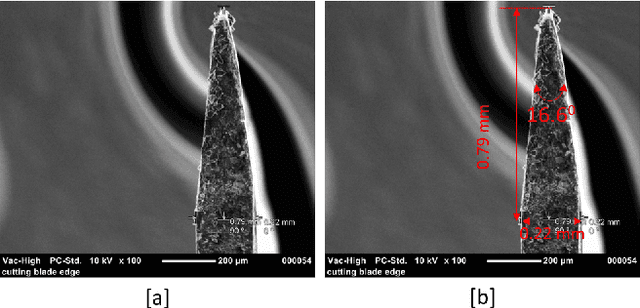
Robotic harvesting of strawberries has gained much interest in the recent past. Although there are many innovations, they haven't yet reached a level that is comparable to an expert human picker. The end effector unit plays a major role in defining the efficiency of such a robotic harvesting system. Even though there are reports on various end effectors for strawberry harvesting, but there they lack a picture of certain parameters that the researchers can rely upon to develop new end effectors. These parameters include the limit of gripping force that can be applied on the peduncle for effective gripping, the force required to cut the strawberry peduncle, etc. These estimations would be helpful in the design cycle of the end effectors that target to grip and cut the strawberry peduncle during the harvesting action. This paper studies the estimation and analysis of these parameters experimentally. It has been estimated that the peduncle gripping force can be limited to 10 N. This enables an end effector to grip a strawberry of mass up to 50 grams with a manipulation acceleration of 50 m/s$^2$ without squeezing the peduncle. The study on peduncle cutting force reveals that a force of 15 N is sufficient to cut a strawberry peduncle using a blade with a wedge angle of 16.6 degrees at a 30-degree orientation.