 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultispectral Fine-Grained Classification of Blackgrass in Wheat and Barley Crops
May 03, 2024

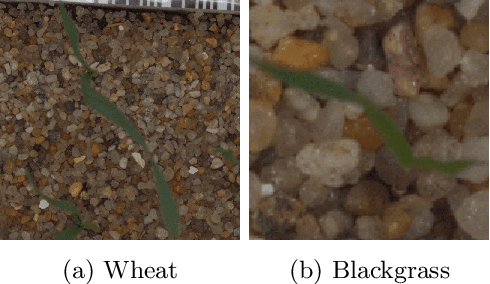

As the burden of herbicide resistance grows and the environmental repercussions of excessive herbicide use become clear, new ways of managing weed populations are needed. This is particularly true for cereal crops, like wheat and barley, that are staple food crops and occupy a globally significant portion of agricultural land. Even small improvements in weed management practices across these major food crops worldwide would yield considerable benefits for both the environment and global food security. Blackgrass is a major grass weed which causes particular problems in cereal crops in north-west Europe, a major cereal production area, because it has high levels of of herbicide resistance and is well adapted to agronomic practice in this region. With the use of machine vision and multispectral imaging, we investigate the effectiveness of state-of-the-art methods to identify blackgrass in wheat and barley crops. As part of this work, we provide a large dataset with which we evaluate several key aspects of blackgrass weed recognition. Firstly, we determine the performance of different CNN and transformer-based architectures on images from unseen fields. Secondly, we demonstrate the role that different spectral bands have on the performance of weed classification. Lastly, we evaluate the role of dataset size in classification performance for each of the models trialled. We find that even with a fairly modest quantity of training data an accuracy of almost 90% can be achieved on images from unseen fields.
A Variable Autonomy approach for an Automated Weeding Platform
Mar 09, 2023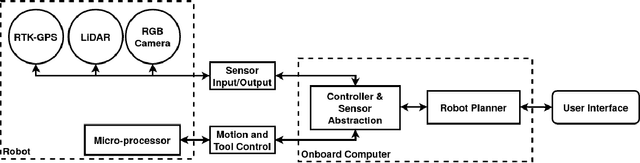
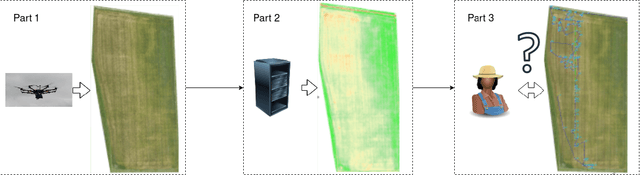
Climate change, increase in world population and the war in Ukraine have led nations such as the UK to put a larger focus on food security, while simultaneously trying to halt declines in biodiversity and reduce risks to human health posed by chemically-reliant farming practices. Achieving these goals simultaneously will require novel approaches and accelerating the deployment of Agri-Robotics from the lab and into the field. In this paper we describe the ARWAC robot platform for mechanical weeding. We explain why the mechanical weeding approach is beneficial compared to the use of pesticides for removing weeds from crop fields. Thereafter, we present the system design and processing pipeline for generating a course of action for the robot to follow, such that it removes as many weeds as possible. Finally, we end by proposing a trust-based ladder of autonomy that will be used, based on the users' confidence in the robot system.