 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimising robotic operation speed with edge computing over 5G networks: Insights from selective harvesting robots
Jul 01, 2024



Selective harvesting by autonomous robots will be a critical enabling technology for future farming. Increases in inflation and shortages of skilled labour are driving factors that can help encourage user acceptability of robotic harvesting. For example, robotic strawberry harvesting requires real-time high-precision fruit localisation, 3D mapping and path planning for 3-D cluster manipulation. Whilst industry and academia have developed multiple strawberry harvesting robots, none have yet achieved human-cost parity. Achieving this goal requires increased picking speed (perception, control and movement), accuracy and the development of low-cost robotic system designs. We propose the edge-server over 5G for Selective Harvesting (E5SH) system, which is an integration of high bandwidth and low latency Fifth Generation (5G) mobile network into a crop harvesting robotic platform, which we view as an enabler for future robotic harvesting systems. We also consider processing scale and speed in conjunction with system environmental and energy costs. A system architecture is presented and evaluated with support from quantitative results from a series of experiments that compare the performance of the system in response to different architecture choices, including image segmentation models, network infrastructure (5G vs WiFi) and messaging protocols such as Message Queuing Telemetry Transport (MQTT) and Transport Control Protocol Robot Operating System (TCPROS). Our results demonstrate that the E5SH system delivers step-change peak processing performance speedup of above 18-fold than a stand-alone embedded computing Nvidia Jetson Xavier NX (NJXN) system.
A Variable Autonomy approach for an Automated Weeding Platform
Mar 09, 2023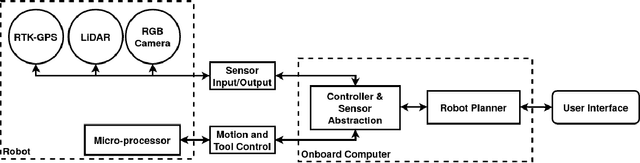
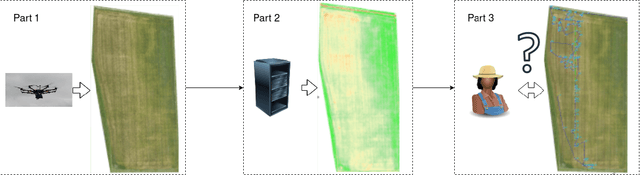
Climate change, increase in world population and the war in Ukraine have led nations such as the UK to put a larger focus on food security, while simultaneously trying to halt declines in biodiversity and reduce risks to human health posed by chemically-reliant farming practices. Achieving these goals simultaneously will require novel approaches and accelerating the deployment of Agri-Robotics from the lab and into the field. In this paper we describe the ARWAC robot platform for mechanical weeding. We explain why the mechanical weeding approach is beneficial compared to the use of pesticides for removing weeds from crop fields. Thereafter, we present the system design and processing pipeline for generating a course of action for the robot to follow, such that it removes as many weeds as possible. Finally, we end by proposing a trust-based ladder of autonomy that will be used, based on the users' confidence in the robot system.