 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimising robotic operation speed with edge computing over 5G networks: Insights from selective harvesting robots
Jul 01, 2024



Selective harvesting by autonomous robots will be a critical enabling technology for future farming. Increases in inflation and shortages of skilled labour are driving factors that can help encourage user acceptability of robotic harvesting. For example, robotic strawberry harvesting requires real-time high-precision fruit localisation, 3D mapping and path planning for 3-D cluster manipulation. Whilst industry and academia have developed multiple strawberry harvesting robots, none have yet achieved human-cost parity. Achieving this goal requires increased picking speed (perception, control and movement), accuracy and the development of low-cost robotic system designs. We propose the edge-server over 5G for Selective Harvesting (E5SH) system, which is an integration of high bandwidth and low latency Fifth Generation (5G) mobile network into a crop harvesting robotic platform, which we view as an enabler for future robotic harvesting systems. We also consider processing scale and speed in conjunction with system environmental and energy costs. A system architecture is presented and evaluated with support from quantitative results from a series of experiments that compare the performance of the system in response to different architecture choices, including image segmentation models, network infrastructure (5G vs WiFi) and messaging protocols such as Message Queuing Telemetry Transport (MQTT) and Transport Control Protocol Robot Operating System (TCPROS). Our results demonstrate that the E5SH system delivers step-change peak processing performance speedup of above 18-fold than a stand-alone embedded computing Nvidia Jetson Xavier NX (NJXN) system.
A Proposal for Semantic Map Representation and Evaluation
Jun 12, 2016

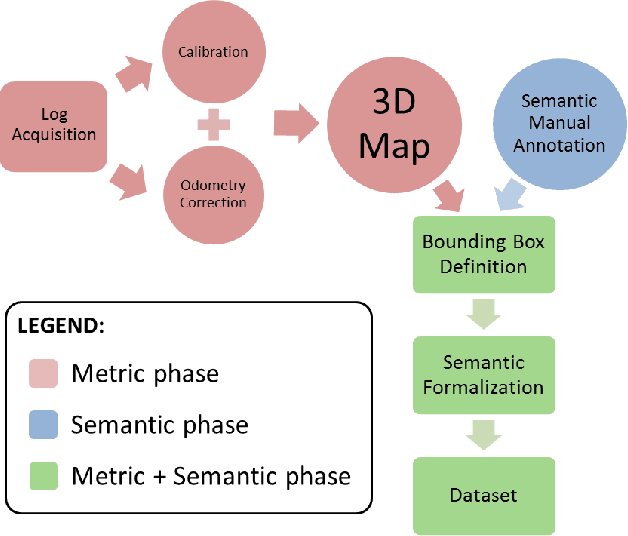
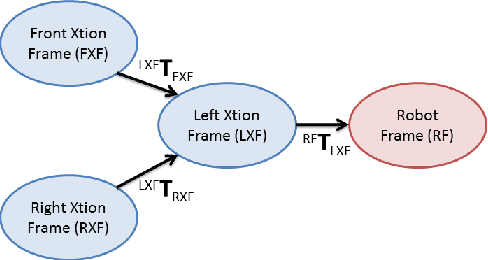
Semantic mapping is the incremental process of "mapping" relevant information of the world (i.e., spatial information, temporal events, agents and actions) to a formal description supported by a reasoning engine. Current research focuses on learning the semantic of environments based on their spatial location, geometry and appearance. Many methods to tackle this problem have been proposed, but the lack of a uniform representation, as well as standard benchmarking suites, prevents their direct comparison. In this paper, we propose a standardization in the representation of semantic maps, by defining an easily extensible formalism to be used on top of metric maps of the environments. Based on this, we describe the procedure to build a dataset (based on real sensor data) for benchmarking semantic mapping techniques, also hypothesizing some possible evaluation metrics. Nevertheless, by providing a tool for the construction of a semantic map ground truth, we aim at the contribution of the scientific community in acquiring data for populating the dataset.