 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Tomato Split Anomaly Detection using Hyperspectral Imaging and Variational Autoencoders
Jan 06, 2025



Tomato anomalies/damages pose a significant challenge in greenhouse farming. While this method of cultivation benefits from efficient resource utilization, anomalies can significantly degrade the quality of farm produce. A common anomaly associated with tomatoes is splitting, characterized by the development of cracks on the tomato skin, which degrades its quality. Detecting this type of anomaly is challenging due to dynamic variations in appearance and sizes, compounded by dataset scarcity. We address this problem in an unsupervised manner by utilizing a tailored variational autoencoder (VAE) with hyperspectral input. Preliminary analysis of the dataset enabled us to select the optimal range of wavelengths for detecting this anomaly. Our findings indicate that the 530nm - 550nm range is suitable for identifying tomato dry splits. The analysis on reconstruction loss allow us to not only detect the anomalies but also to some degree estimate the anomalous regions.
Optimising robotic operation speed with edge computing over 5G networks: Insights from selective harvesting robots
Jul 01, 2024



Selective harvesting by autonomous robots will be a critical enabling technology for future farming. Increases in inflation and shortages of skilled labour are driving factors that can help encourage user acceptability of robotic harvesting. For example, robotic strawberry harvesting requires real-time high-precision fruit localisation, 3D mapping and path planning for 3-D cluster manipulation. Whilst industry and academia have developed multiple strawberry harvesting robots, none have yet achieved human-cost parity. Achieving this goal requires increased picking speed (perception, control and movement), accuracy and the development of low-cost robotic system designs. We propose the edge-server over 5G for Selective Harvesting (E5SH) system, which is an integration of high bandwidth and low latency Fifth Generation (5G) mobile network into a crop harvesting robotic platform, which we view as an enabler for future robotic harvesting systems. We also consider processing scale and speed in conjunction with system environmental and energy costs. A system architecture is presented and evaluated with support from quantitative results from a series of experiments that compare the performance of the system in response to different architecture choices, including image segmentation models, network infrastructure (5G vs WiFi) and messaging protocols such as Message Queuing Telemetry Transport (MQTT) and Transport Control Protocol Robot Operating System (TCPROS). Our results demonstrate that the E5SH system delivers step-change peak processing performance speedup of above 18-fold than a stand-alone embedded computing Nvidia Jetson Xavier NX (NJXN) system.
Tea Chrysanthemum Detection under Unstructured Environments Using the TC-YOLO Model
Nov 04, 2021
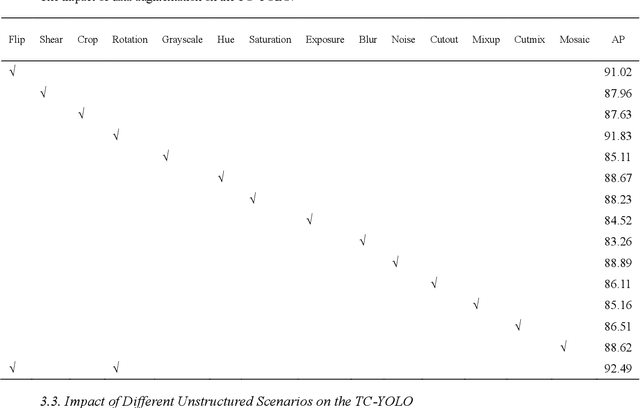
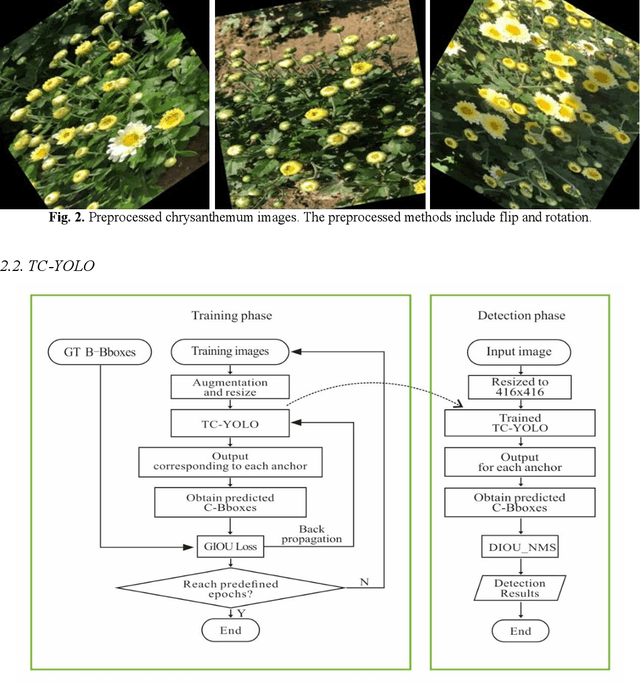
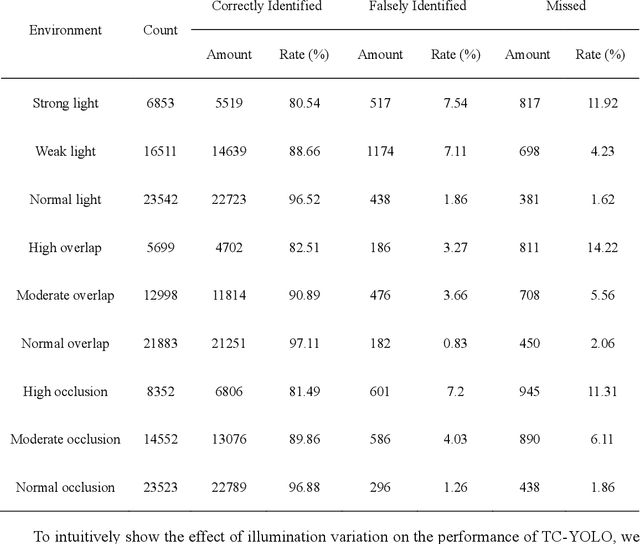
Tea chrysanthemum detection at its flowering stage is one of the key components for selective chrysanthemum harvesting robot development. However, it is a challenge to detect flowering chrysanthemums under unstructured field environments given the variations on illumination, occlusion and object scale. In this context, we propose a highly fused and lightweight deep learning architecture based on YOLO for tea chrysanthemum detection (TC-YOLO). First, in the backbone component and neck component, the method uses the Cross-Stage Partially Dense Network (CSPDenseNet) as the main network, and embeds custom feature fusion modules to guide the gradient flow. In the final head component, the method combines the recursive feature pyramid (RFP) multiscale fusion reflow structure and the Atrous Spatial Pyramid Pool (ASPP) module with cavity convolution to achieve the detection task. The resulting model was tested on 300 field images, showing that under the NVIDIA Tesla P100 GPU environment, if the inference speed is 47.23 FPS for each image (416 * 416), TC-YOLO can achieve the average precision (AP) of 92.49% on our own tea chrysanthemum dataset. In addition, this method (13.6M) can be deployed on a single mobile GPU, and it could be further developed as a perception system for a selective chrysanthemum harvesting robot in the future.
An autoencoder wavelet based deep neural network with attention mechanism for multistep prediction of plant growth
Dec 07, 2020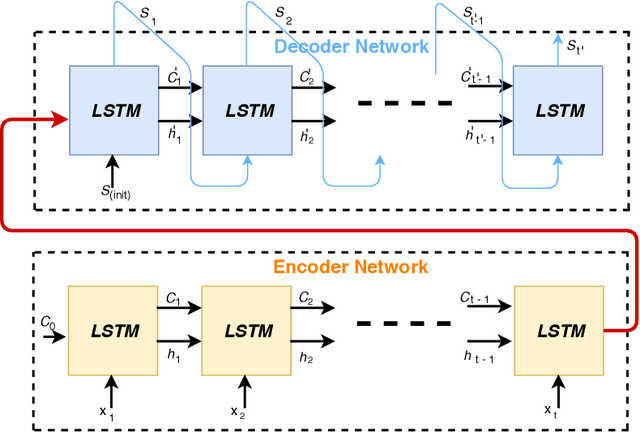
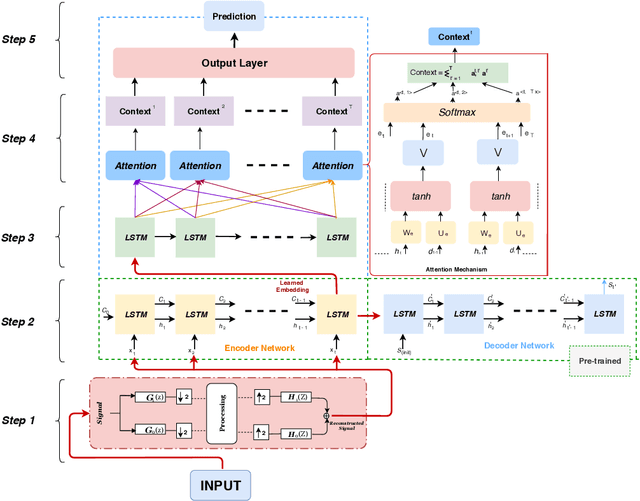
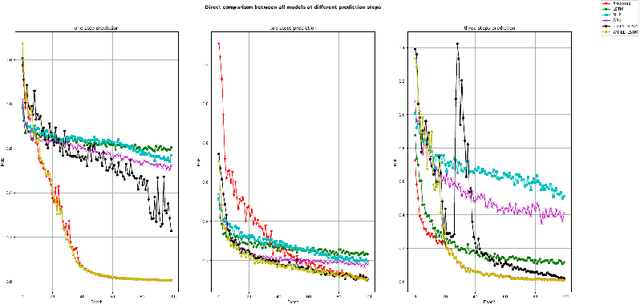
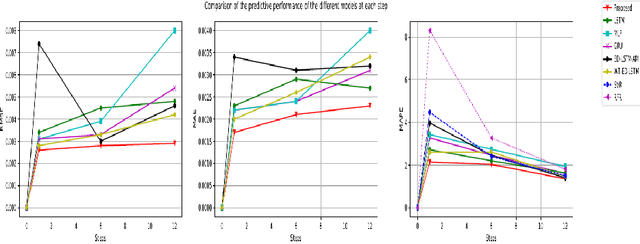
Multi-step prediction is considered of major significance for time series analysis in many real life problems. Existing methods mainly focus on one-step-ahead forecasting, since multiple step forecasting generally fails due to accumulation of prediction errors. This paper presents a novel approach for predicting plant growth in agriculture, focusing on prediction of plant Stem Diameter Variations (SDV). The proposed approach consists of three main steps. At first, wavelet decomposition is applied to the original data, as to facilitate model fitting and reduce noise in them. Then an encoder-decoder framework is developed using Long Short Term Memory (LSTM) and used for appropriate feature extraction from the data. Finally, a recurrent neural network including LSTM and an attention mechanism is proposed for modelling long-term dependencies in the time series data. Experimental results are presented which illustrate the good performance of the proposed approach and that it significantly outperforms the existing models, in terms of error criteria such as RMSE, MAE and MAPE.
Using Deep Learning to Predict Plant Growth and Yield in Greenhouse Environments
Jul 01, 2019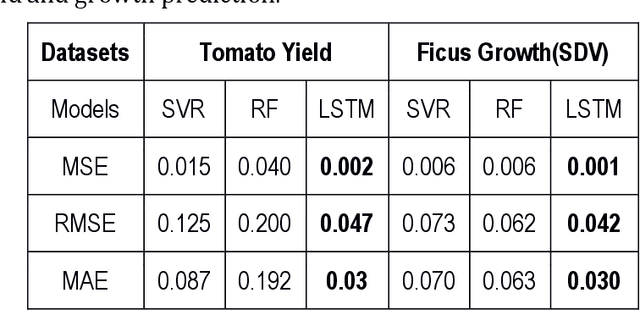
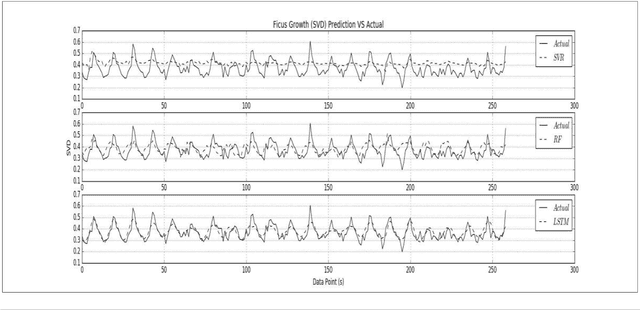
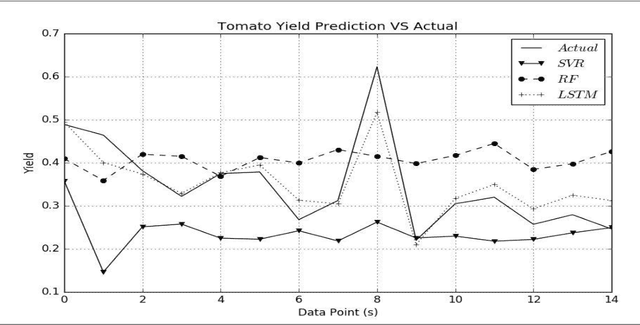
Effective plant growth and yield prediction is an essential task for greenhouse growers and for agriculture in general. Developing models which can effectively model growth and yield can help growers improve the environmental control for better production, match supply and market demand and lower costs. Recent developments in Machine Learning (ML) and, in particular, Deep Learning (DL) can provide powerful new analytical tools. The proposed study utilises ML and DL techniques to predict yield and plant growth variation across two different scenarios, tomato yield forecasting and Ficus benjamina stem growth, in controlled greenhouse environments. We deploy a new deep recurrent neural network (RNN), using the Long Short-Term Memory (LSTM) neuron model, in the prediction formulations. Both the former yield, growth and stem diameter values, as well as the microclimate conditions, are used by the RNN architecture to model the targeted growth parameters. A comparative study is presented, using ML methods, such as support vector regression and random forest regression, utilising the mean square error criterion, in order to evaluate the performance achieved by the different methods. Very promising results, based on data that have been obtained from two greenhouses, in Belgium and the UK, in the framework of the EU Interreg SMARTGREEN project (2017-2021), are presented.
Nemesyst: A Hybrid Parallelism Deep Learning-Based Framework Applied for Internet of Things Enabled Food Retailing Refrigeration Systems
Jun 04, 2019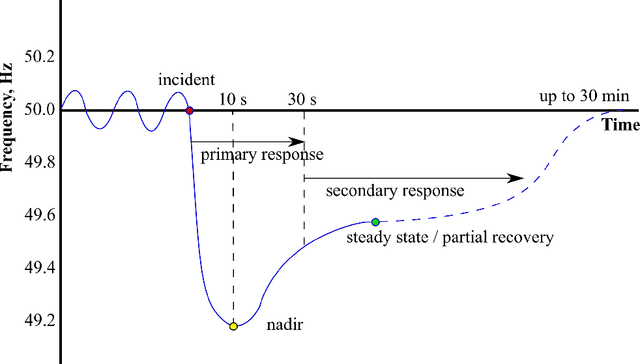
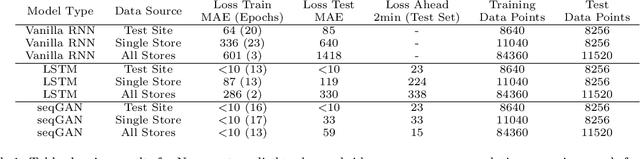
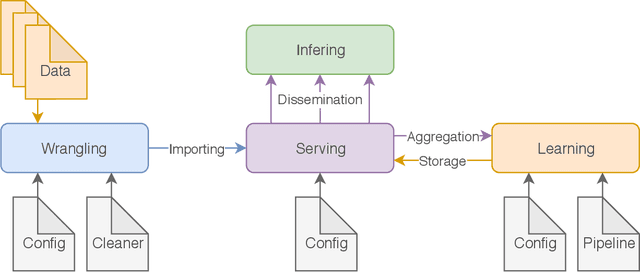
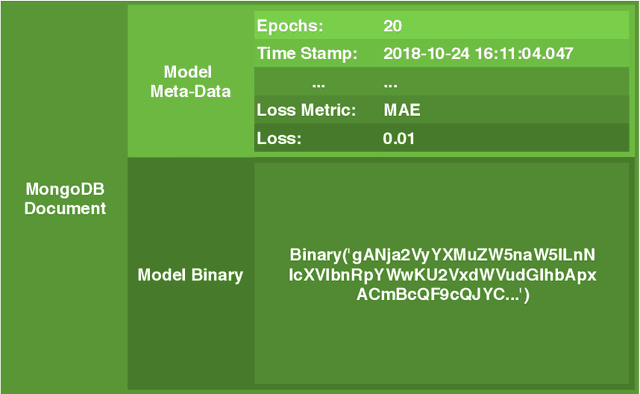
Deep Learning has attracted considerable attention across multiple application domains, including computer vision, signal processing and natural language processing. Although quite a few single node deep learning frameworks exist, such as tensorflow, pytorch and keras, we still lack a complete processing structure that can accommodate large scale data processing, version control, and deployment, all while staying agnostic of any specific single node framework. To bridge this gap, this paper proposes a new, higher level framework, i.e. Nemesyst, which uses databases along with model sequentialisation to allow processes to be fed unique and transformed data at the point of need. This facilitates near real-time application and makes models available for further training or use at any node that has access to the database simultaneously. Nemesyst is well suited as an application framework for internet of things aggregated control systems, deploying deep learning techniques to optimise individual machines in massive networks. To demonstrate this framework, we adopted a case study in a novel domain; deploying deep learning to optimise the high speed control of electrical power consumed by a massive internet of things network of retail refrigeration systems in proportion to load available on the UK National Grid (a demand side response). The case study demonstrated for the first time in such a setting how deep learning models, such as Recurrent Neural Networks (vanilla and Long-Short-Term Memory) and Generative Adversarial Networks paired with Nemesyst, achieve compelling performance, whilst still being malleable to future adjustments as both the data and requirements inevitably change over time.
Kriging-Based Robotic Exploration for Soil Moisture Mapping Using a Cosmic-Ray Sensor
Nov 13, 2018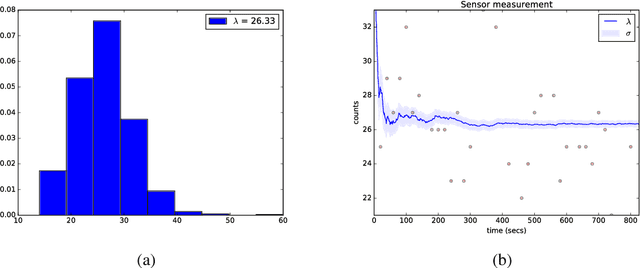
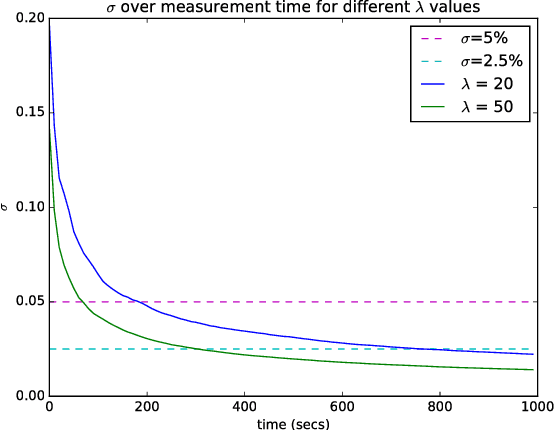

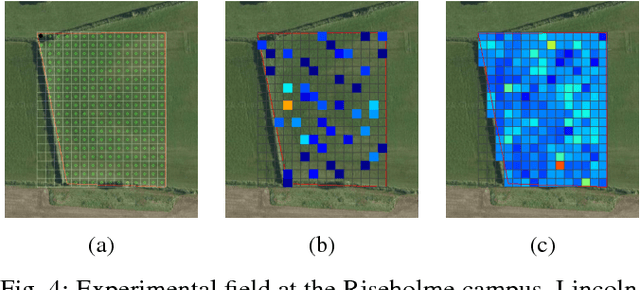
Soil moisture monitoring is a fundamental process to enhance agricultural outcomes and to protect the environment. The traditional methods for measuring moisture content in soil are laborious and expensive, and therefore there is a growing interest in developing sensors and technologies which can reduce the effort and costs. In this work, we propose to use an autonomous mobile robot equipped with a state-of-the-art non-contact soil moisture sensor that builds moisture maps on the fly and automatically selects the most optimal sampling locations. The robot is guided by an autonomous exploration strategy driven by the quality of the soil moisture model which indicates areas of the field where the information is less precise. The sensor model follows the Poisson distribution and we demonstrate how to integrate such measurements into the kriging framework. We also investigate a range of different exploration strategies and assess their usefulness through a set of evaluation experiments based on real soil moisture data collected from two different fields. We demonstrate the benefits of using the adaptive measurement interval and adaptive sampling strategies for building better quality soil moisture models. The presented method is general and can be applied to other scenarios where the measured phenomena directly affects the acquisition time and needs to be spatially mapped.
Agricultural Robotics: The Future of Robotic Agriculture
Aug 02, 2018Agri-Food is the largest manufacturing sector in the UK. It supports a food chain that generates over {\pounds}108bn p.a., with 3.9m employees in a truly international industry and exports {\pounds}20bn of UK manufactured goods. However, the global food chain is under pressure from population growth, climate change, political pressures affecting migration, population drift from rural to urban regions and the demographics of an aging global population. These challenges are recognised in the UK Industrial Strategy white paper and backed by significant investment via a Wave 2 Industrial Challenge Fund Investment ("Transforming Food Production: from Farm to Fork"). Robotics and Autonomous Systems (RAS) and associated digital technologies are now seen as enablers of this critical food chain transformation. To meet these challenges, this white paper reviews the state of the art in the application of RAS in Agri-Food production and explores research and innovation needs to ensure these technologies reach their full potential and deliver the necessary impacts in the Agri-Food sector.
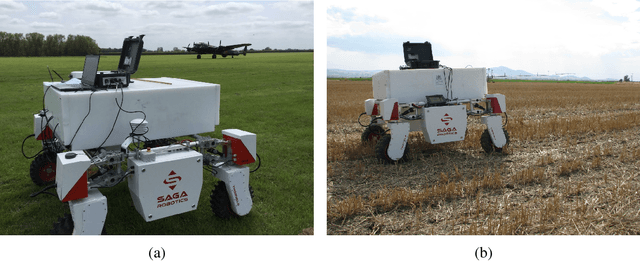
3D Soil Compaction Mapping through Kriging-based Exploration with a Mobile Robot
Mar 21, 2018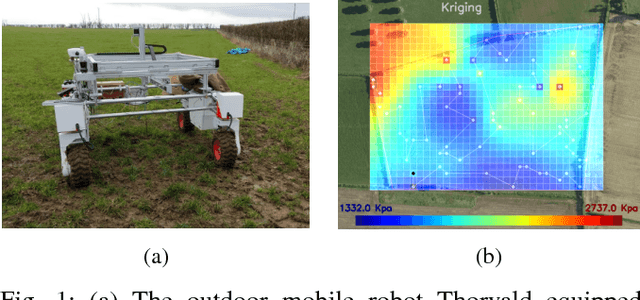
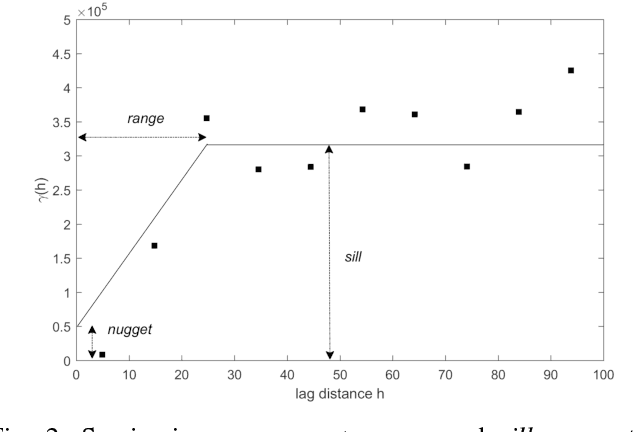
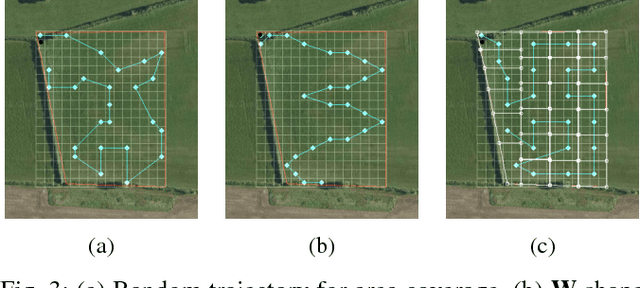
This paper presents an automated method for creating spatial maps of soil condition with an outdoor mobile robot. Effective soil mapping on farms can enhance yields, reduce inputs and help protect the environment. Traditionally, data are collected manually at an arbitrary set of locations, then soil maps are constructed offline using Kriging, a form of Gaussian process regression. This process is laborious and costly, limiting the quality and resolution of the resulting information. Instead, we propose to use an outdoor mobile robot for automatic collection of soil condition data, building soil maps online and also adapting the robot's exploration strategy on-the-fly based on the current quality of the map. We show how using Kriging variance as a reward function for robotic exploration allows for both more efficient data collection and better soil models. This work presents the theoretical foundations for our proposal and an experimental comparison of exploration strategies using soil compaction data from a field generated with a mobile robot.