 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKriging-Based Robotic Exploration for Soil Moisture Mapping Using a Cosmic-Ray Sensor
Nov 13, 2018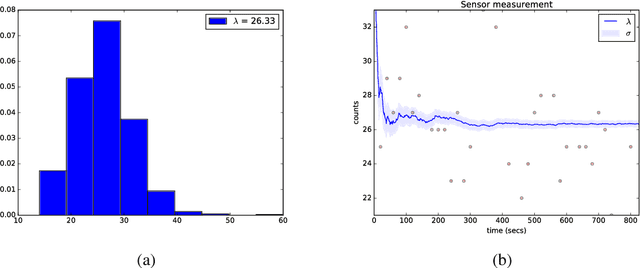
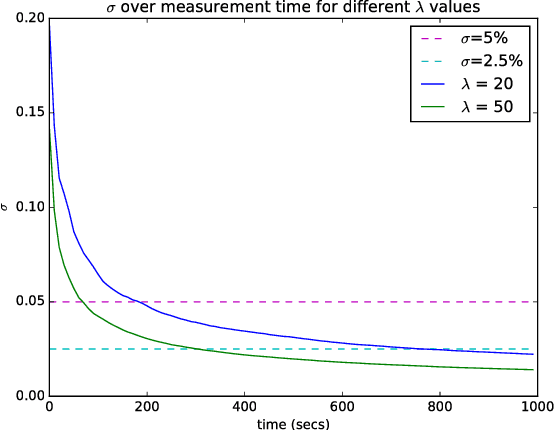
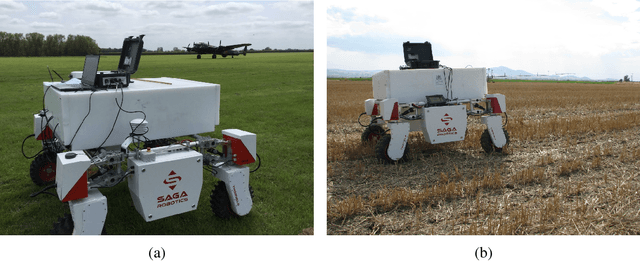

Soil moisture monitoring is a fundamental process to enhance agricultural outcomes and to protect the environment. The traditional methods for measuring moisture content in soil are laborious and expensive, and therefore there is a growing interest in developing sensors and technologies which can reduce the effort and costs. In this work, we propose to use an autonomous mobile robot equipped with a state-of-the-art non-contact soil moisture sensor that builds moisture maps on the fly and automatically selects the most optimal sampling locations. The robot is guided by an autonomous exploration strategy driven by the quality of the soil moisture model which indicates areas of the field where the information is less precise. The sensor model follows the Poisson distribution and we demonstrate how to integrate such measurements into the kriging framework. We also investigate a range of different exploration strategies and assess their usefulness through a set of evaluation experiments based on real soil moisture data collected from two different fields. We demonstrate the benefits of using the adaptive measurement interval and adaptive sampling strategies for building better quality soil moisture models. The presented method is general and can be applied to other scenarios where the measured phenomena directly affects the acquisition time and needs to be spatially mapped.
3D Soil Compaction Mapping through Kriging-based Exploration with a Mobile Robot
Mar 21, 2018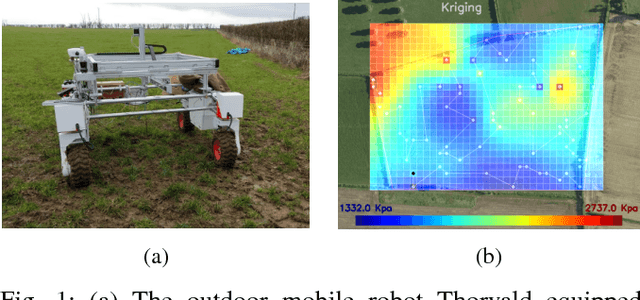
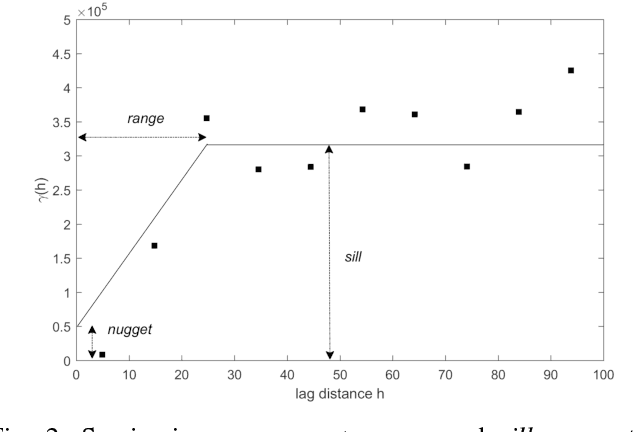
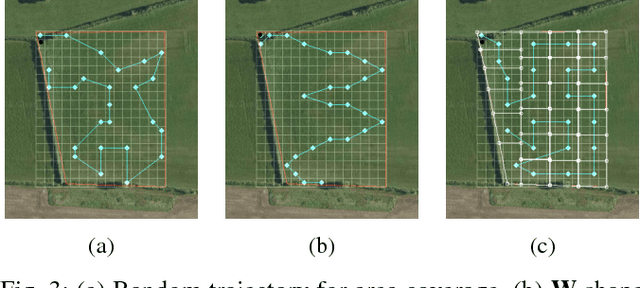
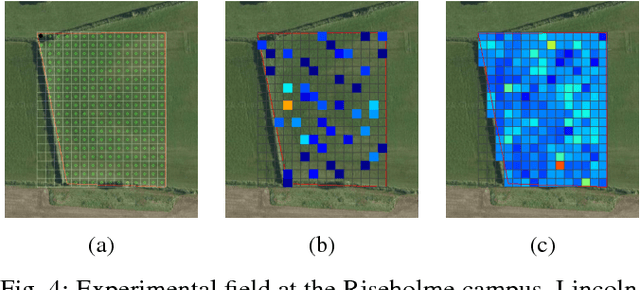
This paper presents an automated method for creating spatial maps of soil condition with an outdoor mobile robot. Effective soil mapping on farms can enhance yields, reduce inputs and help protect the environment. Traditionally, data are collected manually at an arbitrary set of locations, then soil maps are constructed offline using Kriging, a form of Gaussian process regression. This process is laborious and costly, limiting the quality and resolution of the resulting information. Instead, we propose to use an outdoor mobile robot for automatic collection of soil condition data, building soil maps online and also adapting the robot's exploration strategy on-the-fly based on the current quality of the map. We show how using Kriging variance as a reward function for robotic exploration allows for both more efficient data collection and better soil models. This work presents the theoretical foundations for our proposal and an experimental comparison of exploration strategies using soil compaction data from a field generated with a mobile robot.
The STRANDS Project: Long-Term Autonomy in Everyday Environments
Oct 14, 2016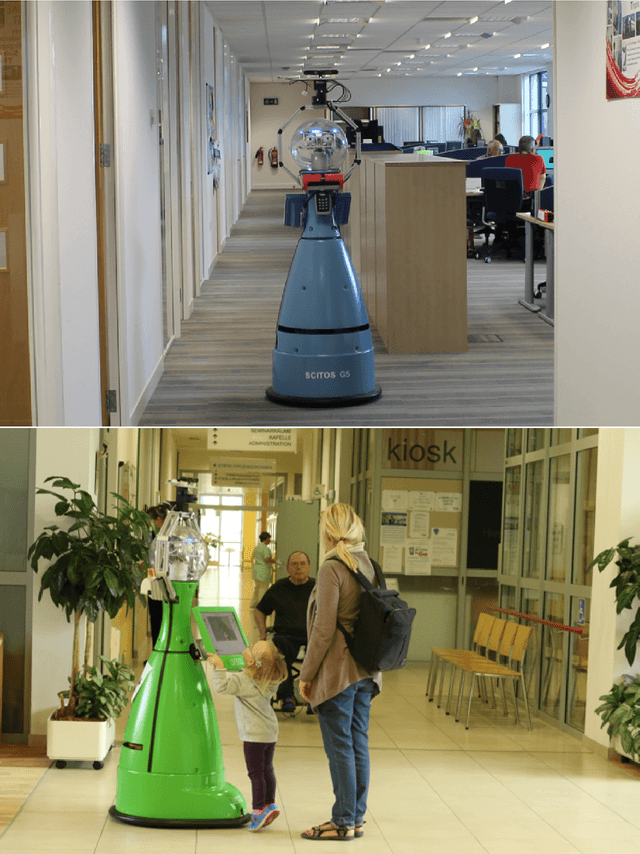
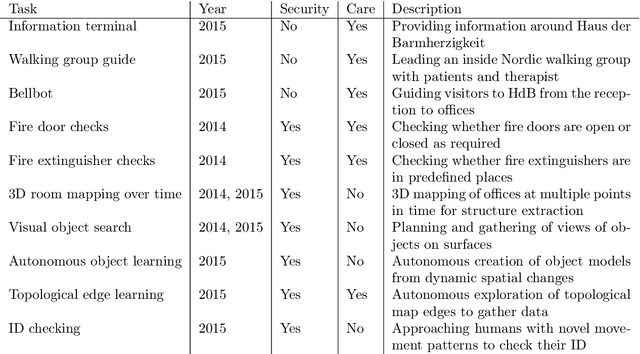
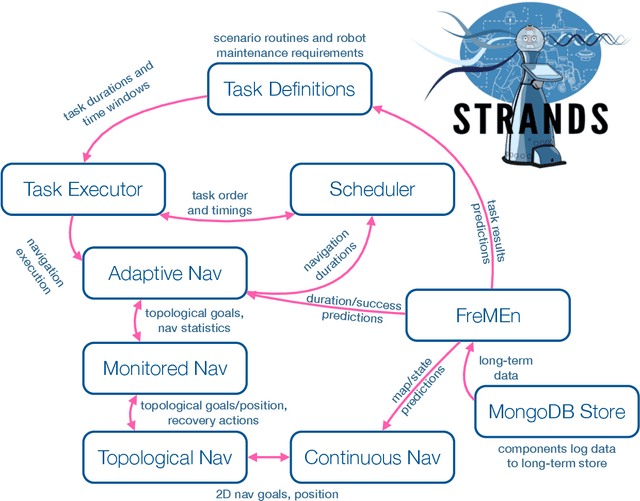
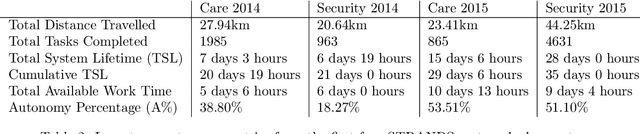
Thanks to the efforts of the robotics and autonomous systems community, robots are becoming ever more capable. There is also an increasing demand from end-users for autonomous service robots that can operate in real environments for extended periods. In the STRANDS project we are tackling this demand head-on by integrating state-of-the-art artificial intelligence and robotics research into mobile service robots, and deploying these systems for long-term installations in security and care environments. Over four deployments, our robots have been operational for a combined duration of 104 days autonomously performing end-user defined tasks, covering 116km in the process. In this article we describe the approach we have used to enable long-term autonomous operation in everyday environments, and how our robots are able to use their long run times to improve their own performance.