 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTea Chrysanthemum Detection under Unstructured Environments Using the TC-YOLO Model
Paper and Code
Nov 04, 2021
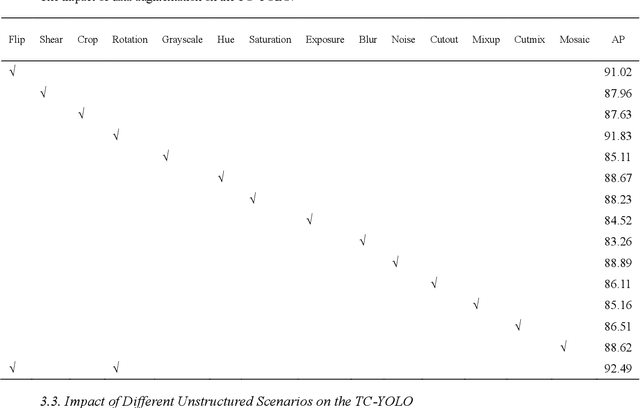
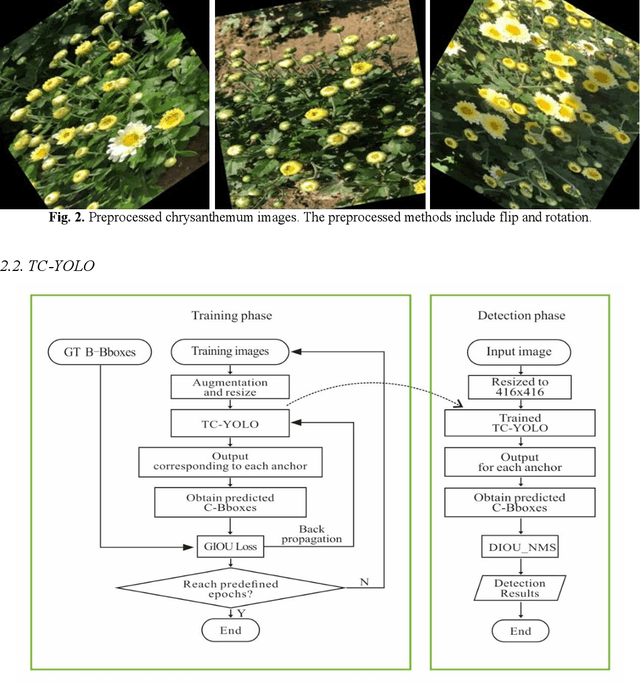
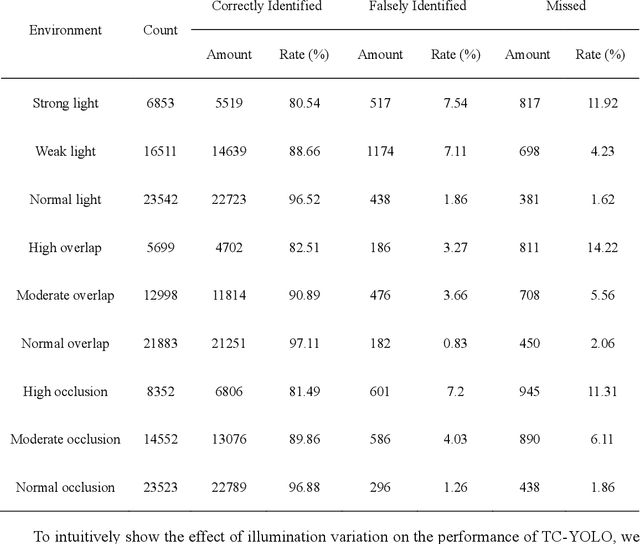
Tea chrysanthemum detection at its flowering stage is one of the key components for selective chrysanthemum harvesting robot development. However, it is a challenge to detect flowering chrysanthemums under unstructured field environments given the variations on illumination, occlusion and object scale. In this context, we propose a highly fused and lightweight deep learning architecture based on YOLO for tea chrysanthemum detection (TC-YOLO). First, in the backbone component and neck component, the method uses the Cross-Stage Partially Dense Network (CSPDenseNet) as the main network, and embeds custom feature fusion modules to guide the gradient flow. In the final head component, the method combines the recursive feature pyramid (RFP) multiscale fusion reflow structure and the Atrous Spatial Pyramid Pool (ASPP) module with cavity convolution to achieve the detection task. The resulting model was tested on 300 field images, showing that under the NVIDIA Tesla P100 GPU environment, if the inference speed is 47.23 FPS for each image (416 * 416), TC-YOLO can achieve the average precision (AP) of 92.49% on our own tea chrysanthemum dataset. In addition, this method (13.6M) can be deployed on a single mobile GPU, and it could be further developed as a perception system for a selective chrysanthemum harvesting robot in the future.