 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Auto-Optimization in Unknown Environments via Structure-Exploiting Dual Control for Exploration and Exploitation
May 21, 2026This paper develops a fast numerical dual control for exploration and exploitation (DCEE) method to address auto-optimization problems in unknown environments. In auto-optimization problems, the optimal operating condition is unknown a priori and may vary with the environment. As in classical dual control techniques, computational burden remains a major concern in DCEE for active learning. Existing DCEE methods provide a principled exploration-exploitation objective, but mainly realized through standard optimization packages or explicit gradient-type update laws, where the numerical structure of the DCEE has not been fully exploited. This paper shows that the reward function in DCEE has an inherent convex-over-nonlinear structure, where the exploitation and exploration terms form a unified nonlinear residual map equipped with a convex outer loss. Benefiting from this structure, a structure-exploiting numerical method is developed by linearizing only the nonlinear residual map while preserving the convex outer loss. Thus, each subproblem is transformed into a structured convex form that can be solved reliably. The resulting generalized Gauss-Newton Hessian approximation is positive semidefinite and depends only on first-order derivatives, thereby supporting fast online computation. The proposed method is evaluated on a vehicle cruising auto-optimization problem and compared with existing methods. Simulation and hardware-in-the-loop experimental results show that the proposed method improves control performance and achieves a speedup of approximately one order of magnitude, with a microsecond-level maximum computation time of only 83 μs on a typical vehicle embedded CPU.
Autonomous UAV Pipeline Near-proximity Inspection via Disturbance-Aware Predictive Visual Servoing
Apr 21, 2026Reliable pipeline inspection is critical to safe energy transportation, but is constrained by long distances, complex terrain, and risks to human inspectors. Unmanned aerial vehicles provide a flexible sensing platform, yet reliable autonomous inspection remains challenging. This paper presents an autonomous quadrotor near-proximity pipeline inspection framework for three-dimensional scenarios based on image-based visual servoing model predictive control (VMPC). A unified predictive model couples quadrotor dynamics with image feature kinematics, enabling direct image-space prediction within the control loop. To address low-rate visual updates, measurement noise, and environmental uncertainties, an extended-state Kalman filtering scheme with image feature prediction (ESKF-PRE) is developed, and the estimated lumped disturbances are incorporated into the VMPC prediction model, yielding the ESKF-PRE-VMPC framework. A terrain-adaptive velocity design is introduced to maintain the desired cruising speed while generating vertical velocity references over unknown terrain slopes without prior terrain information. The framework is validated in high-fidelity Gazebo simulations and real-world experiments. In real-world tests, the proposed method reduces RMSE by 52.63% and 75.04% in pipeline orientation and lateral deviation in the image, respectively, for straight-pipeline inspection without wind, and successfully completes both wind-disturbance and bend-pipeline tasks where baseline method fails. An open-source nano quadrotor is modified for indoor experimentation.
MIMO OFDM-Enabled ISAC for Low-Altitude Non-Cooperative UAV Surveillance: A Survey
Apr 03, 2026The widespread use of unmanned aerial vehicles (UAVs) in low-altitude airspace has raised significant safety and security concerns, motivating the development of reliable non-cooperative UAV surveillance technologies. Integrated sensing and communication (ISAC), enabled by multiple-input multiple-output (MIMO) architectures and orthogonal frequency-division multiplexing (OFDM) waveforms, has emerged as a promising paradigm for leveraging cellular infrastructure to support large-scale sensing without additional hardware deployment. This paper presents the first comprehensive survey dedicated to MIMO OFDM-enabled ISAC for low-altitude non-cooperative UAV surveillance, where the targeted UAVs do not intentionally assist the monitoring system through dedicated signaling or prior coordinate sharing. We first analyze the unique propagation characteristics of low-altitude UAV sensing, including severe clutter, rapid channel variations, and mixed near/far-field effects, and discuss corresponding waveform design principles. We then systematically review existing MIMO OFDM-enabled UAV surveillance techniques along four key dimensions: ISAC system modeling and network optimization, UAV detection and tracking algorithms under single and networked base station (BS) architectures, UAV identification techniques based on micro-Doppler and learning-based approaches, and experimental validations and practical field trials. Subsequently, we summarize open challenges such as sensing under severe clutter and multipath, data scarcity for identification, cooperative multi-BS fusion, and real-world deployment constraints. Finally, we outline promising future research directions toward 5G-Advanced (5G-A) and 6G-enabled low-altitude surveillance systems.
A Fast Semidefinite Convex Relaxation for Optimal Control Problems With Spatio-Temporal Constraints
Jan 06, 2026Solving optimal control problems (OCPs) of autonomous agents operating under spatial and temporal constraints fast and accurately is essential in applications ranging from eco-driving of autonomous vehicles to quadrotor navigation. However, the nonlinear programs approximating the OCPs are inherently nonconvex due to the coupling between the dynamics and the event timing, and therefore, they are challenging to solve. Most approaches address this challenge by predefining waypoint times or just using nonconvex trajectory optimization, which simplifies the problem but often yields suboptimal solutions. To significantly improve the numerical properties, we propose a formulation with a time-scaling direct multiple shooting scheme that partitions the prediction horizon into segments aligned with characteristic time constraints. Moreover, we develop a fast semidefinite-programming-based convex relaxation that exploits the sparsity pattern of the lifted formulation. Comprehensive simulation studies demonstrate the solution optimality and computational efficiency. Furthermore, real-world experiments on a quadrotor waypoint flight task with constrained open time windows validate the practical applicability of the approach in complex environments.
A hierarchical control framework for autonomous decision-making systems: Integrating HMDP and MPC
Jan 12, 2024This paper proposes a comprehensive hierarchical control framework for autonomous decision-making arising in robotics and autonomous systems. In a typical hierarchical control architecture, high-level decision making is often characterised by discrete state and decision/control sets. However, a rational decision is usually affected by not only the discrete states of the autonomous system, but also the underlying continuous dynamics even the evolution of its operational environment. This paper proposes a holistic and comprehensive design process and framework for this type of challenging problems, from new modelling and design problem formulation to control design and stability analysis. It addresses the intricate interplay between traditional continuous systems dynamics utilized at the low levels for control design and discrete Markov decision processes (MDP) for facilitating high-level decision making. We model the decision making system in complex environments as a hybrid system consisting of a controlled MDP and autonomous (i.e. uncontrolled) continuous dynamics. Consequently, the new formulation is called as hybrid Markov decision process (HMDP). The design problem is formulated with a focus on ensuring both safety and optimality while taking into account the influence of both the discrete and continuous state variables of different levels. With the help of the model predictive control (MPC) concept, a decision maker design scheme is proposed for the proposed hybrid decision making model. By carefully designing key ingredients involved in this scheme, it is shown that the recursive feasibility and stability of the proposed autonomous decision making scheme are guaranteed. The proposed framework is applied to develop an autonomous lane changing system for intelligent vehicles.
Structurally aware 3D gas distribution mapping using belief propagation: a real-time algorithm for robotic deployment
Dec 14, 2022
This paper proposes a new 3D gas distribution mapping technique based on the local message passing of Gaussian belief propagation that is capable of resolving in real time, concentration estimates in 3D space whilst accounting for the obstacle information within the scenario, the first of its kind in the literature. The gas mapping problem is formulated as a 3D factor graph of Gaussian potentials, the connections of which are conditioned on local occupancy values. The Gaussian belief propagation framework is introduced as the solver and a new hybrid message scheduler is introduced to increase the rate of convergence. The factor graph problem is then redesigned as a dynamically expanding inference task, coupling the information of consecutive gas measurements with local spatial structure obtained by the robot. The proposed algorithm is compared to the state of the art methods in 2D and 3D simulations and is found to resolve distribution maps orders of magnitude quicker than typical direct solvers. The proposed framework is then deployed for the first time onboard a ground robot in a 3D mapping and exploration task. The system is shown to be able to resolve multiple sensor inputs and output high resolution 3D gas distribution maps in a GPS denied cluttered scenario in real time. This online inference of complicated plume structures provides a new layer of contextual information over its 2D counterparts and enables autonomous systems to take advantage of real time estimates to inform potential next best sampling locations.
Autonomous search of an airborne release in urban environments using informed tree planning
Sep 08, 2021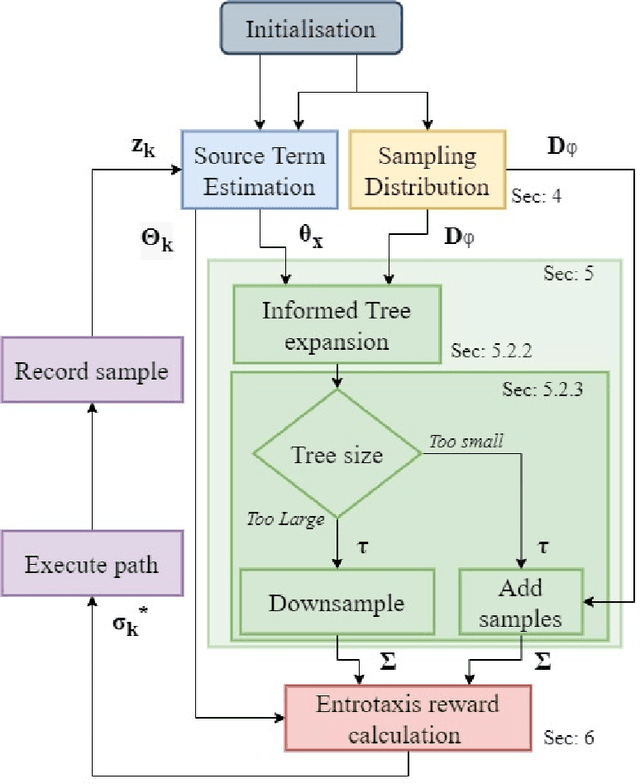
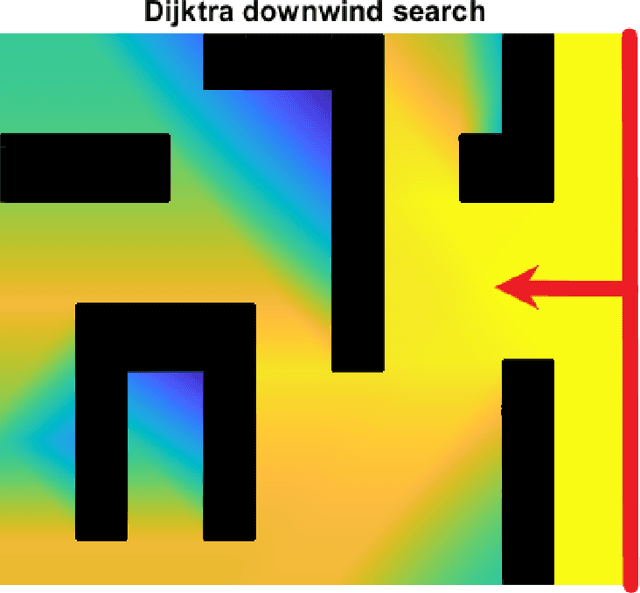
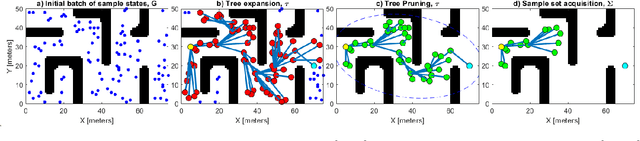
The use of autonomous vehicles for chemical source localisation is a key enabling tool for disaster response teams to safely and efficiently deal with chemical emergencies. Whilst much work has been performed on source localisation using autonomous systems, most previous works have assumed an open environment or employed simplistic obstacle avoidance, separate to the estimation procedure. In this paper, we explore the coupling of the path planning task for both source term estimation and obstacle avoidance in a holistic framework. The proposed system intelligently produces potential gas sampling locations based on the current estimation of the wind field and the local map. Then a tree search is performed to generate paths toward the estimated source location that traverse around any obstacles and still allow for exploration of potentially superior sampling locations. The proposed informed tree planning algorithm is then tested against the Entrotaxis technique in a series of high fidelity simulations. The proposed system is found to reduce source position error far more efficiently than Entrotaxis in a feature rich environment, whilst also exhibiting vastly more consistent and robust results.
Dual Control for Exploitation and Exploration (DCEE) in Autonomous Search
Dec 11, 2020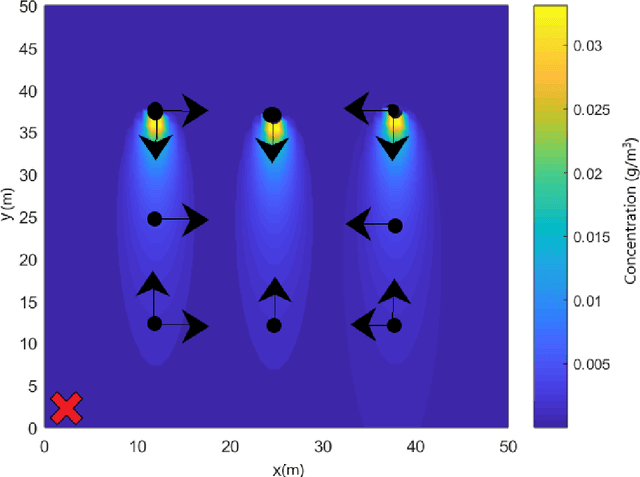
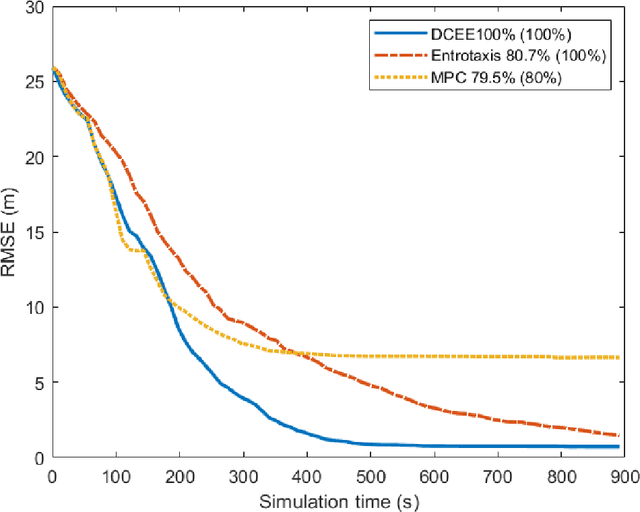
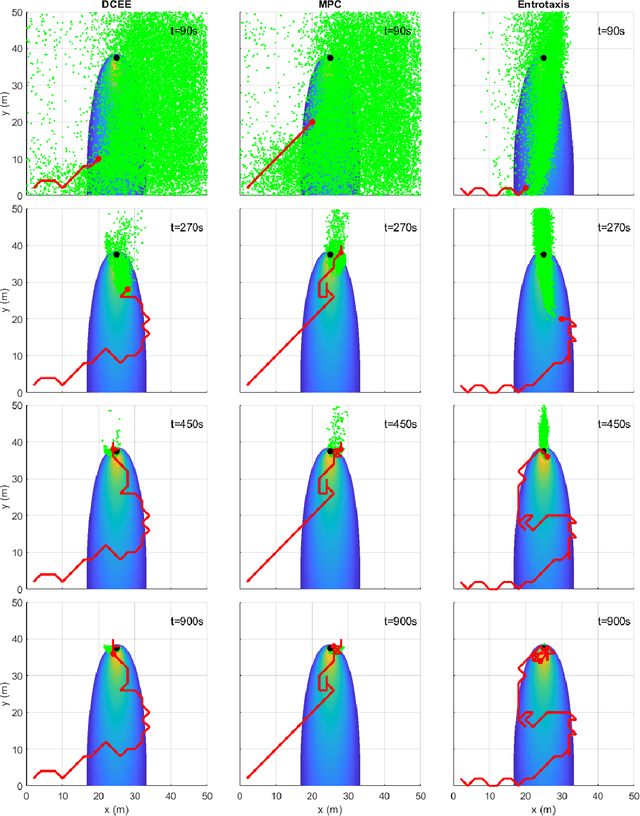
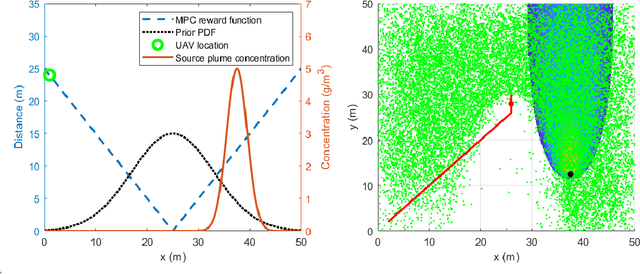
This paper proposes an optimal autonomous search framework, namely Dual Control for Exploration and Exploitation (DCEE), for a target at unknown location in an unknown environment. Source localisation is to find sources of atmospheric hazardous material release in a partially unknown environment. This paper proposes a control theoretic approach to this autonomous search problem. To cope with an unknown target location, at each step, the target location is estimated by Bayesian inference. Then a control action is taken to minimise the error between future robot position and the hypothesised future estimation of the target location. The latter is generated by hypothesised measurements at the corresponding future robot positions (due to the control action) with the current estimation of the target location as a prior. It shows that this approach can take into account both the error between the next robot position and the estimate of the target location, and the uncertainty of the estimate. This approach is further extended to the case with not only an unknown source location, but also an unknown local environment (e.g. wind speed and direction). Different from current information theoretic approaches, this new control theoretic approach achieves the optimal trade-off between exploitation and exploration in a unknown environment with an unknown target by driving the robot moving towards estimated target location while reducing its estimation uncertainty. This scheme is implemented using particle filtering on a mobile robot. Simulation and experimental studies demonstrate promising performance of the proposed approach. The relationships between the proposed approach, informative path planning, dual control, and classic model predictive control are discussed and compared.
Evolving Inborn Knowledge For Fast Adaptation in Dynamic POMDP Problems
Apr 28, 2020
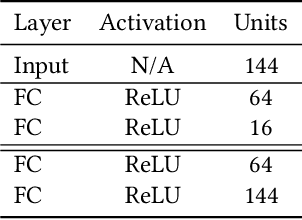
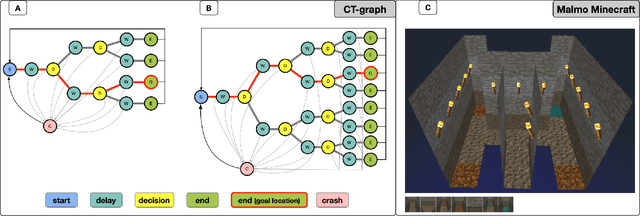
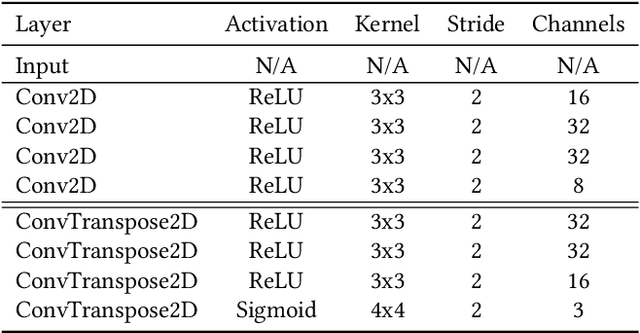
Rapid online adaptation to changing tasks is an important problem in machine learning and, recently, a focus of meta-reinforcement learning. However, reinforcement learning (RL) algorithms struggle in POMDP environments because the state of the system, essential in a RL framework, is not always visible. Additionally, hand-designed meta-RL architectures may not include suitable computational structures for specific learning problems. The evolution of online learning mechanisms, on the contrary, has the ability to incorporate learning strategies into an agent that can (i) evolve memory when required and (ii) optimize adaptation speed to specific online learning problems. In this paper, we exploit the highly adaptive nature of neuromodulated neural networks to evolve a controller that uses the latent space of an autoencoder in a POMDP. The analysis of the evolved networks reveals the ability of the proposed algorithm to acquire inborn knowledge in a variety of aspects such as the detection of cues that reveal implicit rewards, and the ability to evolve location neurons that help with navigation. The integration of inborn knowledge and online plasticity enabled fast adaptation and better performance in comparison to some non-evolutionary meta-reinforcement learning algorithms. The algorithm proved also to succeed in the 3D gaming environment Malmo Minecraft.
Agricultural Robotics: The Future of Robotic Agriculture
Aug 02, 2018Agri-Food is the largest manufacturing sector in the UK. It supports a food chain that generates over {\pounds}108bn p.a., with 3.9m employees in a truly international industry and exports {\pounds}20bn of UK manufactured goods. However, the global food chain is under pressure from population growth, climate change, political pressures affecting migration, population drift from rural to urban regions and the demographics of an aging global population. These challenges are recognised in the UK Industrial Strategy white paper and backed by significant investment via a Wave 2 Industrial Challenge Fund Investment ("Transforming Food Production: from Farm to Fork"). Robotics and Autonomous Systems (RAS) and associated digital technologies are now seen as enablers of this critical food chain transformation. To meet these challenges, this white paper reviews the state of the art in the application of RAS in Agri-Food production and explores research and innovation needs to ensure these technologies reach their full potential and deliver the necessary impacts in the Agri-Food sector.