 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous UAV Pipeline Near-proximity Inspection via Disturbance-Aware Predictive Visual Servoing
Apr 21, 2026Reliable pipeline inspection is critical to safe energy transportation, but is constrained by long distances, complex terrain, and risks to human inspectors. Unmanned aerial vehicles provide a flexible sensing platform, yet reliable autonomous inspection remains challenging. This paper presents an autonomous quadrotor near-proximity pipeline inspection framework for three-dimensional scenarios based on image-based visual servoing model predictive control (VMPC). A unified predictive model couples quadrotor dynamics with image feature kinematics, enabling direct image-space prediction within the control loop. To address low-rate visual updates, measurement noise, and environmental uncertainties, an extended-state Kalman filtering scheme with image feature prediction (ESKF-PRE) is developed, and the estimated lumped disturbances are incorporated into the VMPC prediction model, yielding the ESKF-PRE-VMPC framework. A terrain-adaptive velocity design is introduced to maintain the desired cruising speed while generating vertical velocity references over unknown terrain slopes without prior terrain information. The framework is validated in high-fidelity Gazebo simulations and real-world experiments. In real-world tests, the proposed method reduces RMSE by 52.63% and 75.04% in pipeline orientation and lateral deviation in the image, respectively, for straight-pipeline inspection without wind, and successfully completes both wind-disturbance and bend-pipeline tasks where baseline method fails. An open-source nano quadrotor is modified for indoor experimentation.
MPC as a Copilot: A Predictive Filter Framework with Safety and Stability Guarantees
Mar 29, 2026Ensuring both safety and stability remains a fundamental challenge in learning-based control, where goal-oriented policies often neglect system constraints and closed-loop state convergence. To address this limitation, this paper introduces the Predictive Safety--Stability Filter (PS2F), a unified predictive filter framework that guarantees constraint satisfaction and asymptotic stability within a single architecture. The PS2F framework comprises two cascaded optimal control problems: a nominal model predictive control (MPC) layer that serves solely as a copilot, implicitly defining a Lyapunov function and generating safety- and stability-certified predicted trajectories, and a secondary filtering layer that adjusts external command to remain within a provably safe and stable region. This cascaded structure enables PS2F to inherit the theoretical guarantees of nominal MPC while accommodating goal-oriented external commands. Rigorous analysis establishes recursive feasibility and asymptotic stability of the closed-loop system without introducing additional conservatism beyond that associated with the nominal MPC. Furthermore, a time-varying parameterisation allows PS2F to transition smoothly between safety-prioritised and stability-oriented operation modes, providing a principled mechanism for balancing exploration and exploitation. The effectiveness of the proposed framework is demonstrated through comparative numerical experiments.
HortiMulti: A Multi-Sensor Dataset for Localisation and Mapping in Horticultural Polytunnels
Mar 23, 2026Agricultural robotics is gaining increasing relevance in both research and real-world deployment. As these systems are expected to operate autonomously in more complex tasks, the availability of representative real-world datasets becomes essential. While domains such as urban and forestry robotics benefit from large and established benchmarks, horticultural environments remain comparatively under-explored despite the economic significance of this sector. To address this gap, we present HortiMulti, a multimodal, cross-season dataset collected in commercial strawberry and raspberry polytunnels across an entire growing season, capturing substantial appearance variation, dynamic foliage, specular reflections from plastic covers, severe perceptual aliasing, and GNSS-unreliable conditions, all of which directly degrade existing localisation and perception algorithms. The sensor suite includes two 3D LiDARs, four RGB cameras, an IMU, GNSS, and wheel odometry. Ground truth trajectories are derived from a combination of Total Station surveying, AprilTag fiducial markers, and LiDAR-inertial odometry, spanning dense, sparse, and marker-free coverage to support evaluation under both controlled and realistic conditions. We release time-synchronised raw measurements, calibration files, reference trajectories, and baseline benchmarks for visual, LiDAR, and multi-sensor SLAM, with results confirming that current state-of-the-art methods remain inadequate for reliable polytunnel deployment, establishing HortiMulti as a one-stop resource for developing and testing robotic perception systems in horticulture environments.
XIT: Exploration and Exploitation Informed Trees for Active Gas Distribution Mapping in Unknown Environments
Feb 14, 2026Mobile robotic gas distribution mapping (GDM) provides critical situational awareness during emergency responses to hazardous gas releases. However, most systems still rely on teleoperation, limiting scalability and response speed. Autonomous active GDM is challenging in unknown and cluttered environments, because the robot must simultaneously explore traversable space, map the environment, and infer the gas distribution belief from sparse chemical measurements. We address this by formulating active GDM as a next-best-trajectory informative path planning (IPP) problem and propose XIT (Exploration-Exploitation Informed Trees), a sampling-based planner that balances exploration and exploitation by generating concurrent trajectories toward exploration-rich goals while collecting informative gas measurements en route. XIT draws batches of samples from an Upper Confidence Bound (UCB) information field derived from the current gas posterior and expands trees using a cost that trades off travel effort against gas concentration and uncertainty. To enable plume-aware exploration, we introduce the gas frontier concept, defined as unobserved regions adjacent to high gas concentrations, and propose the Wavefront Gas Frontier Detection (WGFD) algorithm for their identification. High-fidelity simulations and real-world experiments demonstrate the benefits of XIT in terms of GDM quality and efficiency. Although developed for active GDM, XIT is readily applicable to other robotic information-gathering tasks in unknown environments that face the exploration and exploitation trade-off.
Mr.MSTE: Multi-robot Multi-Source Term Estimation with Wind-Aware Coverage Control
Dec 18, 2025



This paper presents a Multi-Robot Multi-Source Term Estimation (MRMSTE) framework that enables teams of mobile robots to collaboratively sample gas concentrations and infer the parameters of an unknown number of airborne releases. The framework is built on a hybrid Bayesian inference scheme that represents the joint multi-source probability density and incorporates physics-informed state transitions, including source birth, removal, and merging induced by atmospheric dispersion. A superposition-based measurement model is naturally accommodated, allowing sparse concentration measurements to be exploited efficiently. To guide robot deployment, we introduce a wind-aware coverage control (WCC) strategy that integrates the evolving multi-source belief with local wind information to prioritize regions of high detection likelihood. Unlike conventional coverage control or information-theoretic planners, WCC explicitly accounts for anisotropic plume transport when modelling sensor performance, leading to more effective sensor placement for multi-source estimation. Monte Carlo studies demonstrate faster convergence and improved separation of individual source beliefs compared to traditional coverage-based strategies and small-scale static sensor networks. Real-world experiments with CO2 releases using TurtleBot platforms further validate the proposed approach, demonstrating its practicality for scalable multi-robot gas-sensing applications.
Beyond Prior Limits: Addressing Distribution Misalignment in Particle Filtering
Jan 30, 2025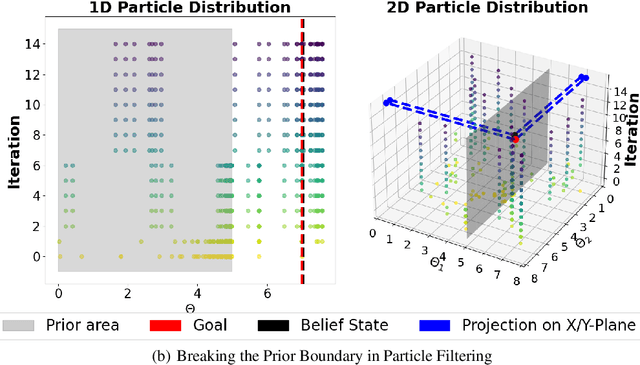
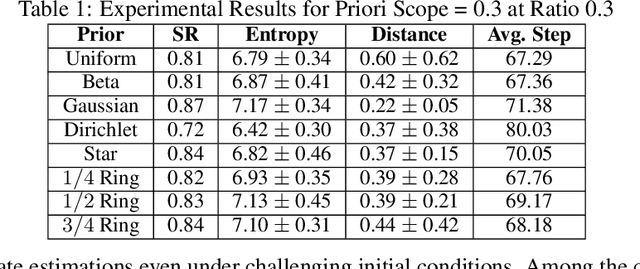
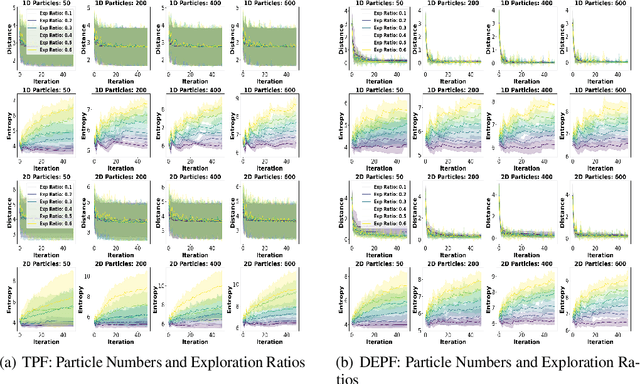
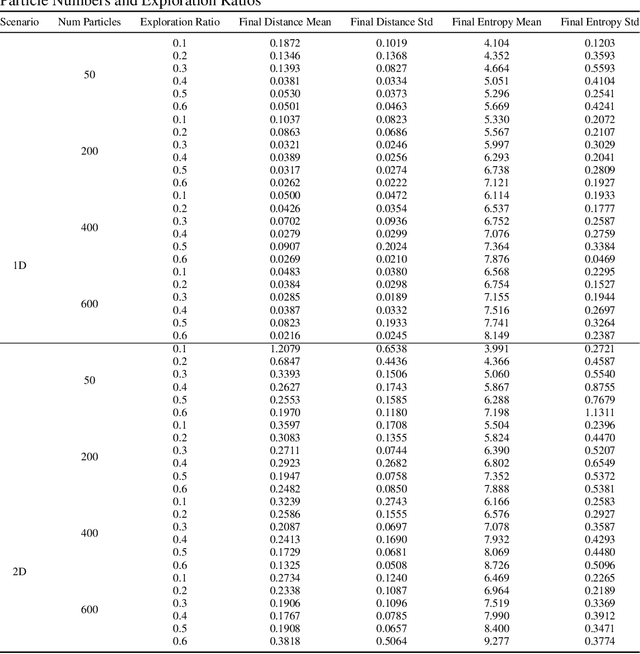
Particle filtering is a Bayesian inference method and a fundamental tool in state estimation for dynamic systems, but its effectiveness is often limited by the constraints of the initial prior distribution, a phenomenon we define as the Prior Boundary Phenomenon. This challenge arises when target states lie outside the prior's support, rendering traditional particle filtering methods inadequate for accurate estimation. Although techniques like unbounded priors and larger particle sets have been proposed, they remain computationally prohibitive and lack adaptability in dynamic scenarios. To systematically overcome these limitations, we propose the Diffusion-Enhanced Particle Filtering Framework, which introduces three key innovations: adaptive diffusion through exploratory particles, entropy-driven regularisation to prevent weight collapse, and kernel-based perturbations for dynamic support expansion. These mechanisms collectively enable particle filtering to explore beyond prior boundaries, ensuring robust state estimation for out-of-boundary targets. Theoretical analysis and extensive experiments validate framework's effectiveness, indicating significant improvements in success rates and estimation accuracy across high-dimensional and non-convex scenarios.
Redundant Observer-Based Tracking Control for Object Extraction Using a Cable Connected UAV
Oct 31, 2024



A new disturbance observer based control scheme is developed for a quadrotor under the concurrent disturbances from a lightweight elastic tether cable and a lumped vertical disturbance. This elastic tether is unusual as it creates a disturbance proportional to the multicopter's translational movement. This paper takes an observer-based approach to estimate the stiffness coefficient of the cable and uses the system model to update the estimates of the external forces, which are then compensated in the control action. Given that the tethered cable force affects both horizontal channels of the quadrotor and is also coupled with the vertical channel, the proposed disturbance observer is constructed to exploit the redundant measurements across all three channels to jointly estimate the cable stiffness and the vertical disturbance. A pseudo-inverse method is used to determine the observer gain functions, such that the estimation of the two quantities is decoupled and stable. Compared to standard disturbance observers which assume nearly constant disturbances, the proposed approach can quickly adjust its total force estimate as the tethered quadrotor changes its position or tautness of the tether. This is applied to two experiments - a tracking performance test where the multicopter moves under a constant tether strain, and an object extraction test. In the second test, the multicopter manipulates a nonlinear mechanism mimicking the extraction of a wedged object. In both cases, the proposed approach shows significant improvement over standard Disturbance Observer and Extended State Observer approaches. A video summary of the experiments can be found at https://youtu.be/9gKr13WTj-k.
Autonomous Goal Detection and Cessation in Reinforcement Learning: A Case Study on Source Term Estimation
Sep 14, 2024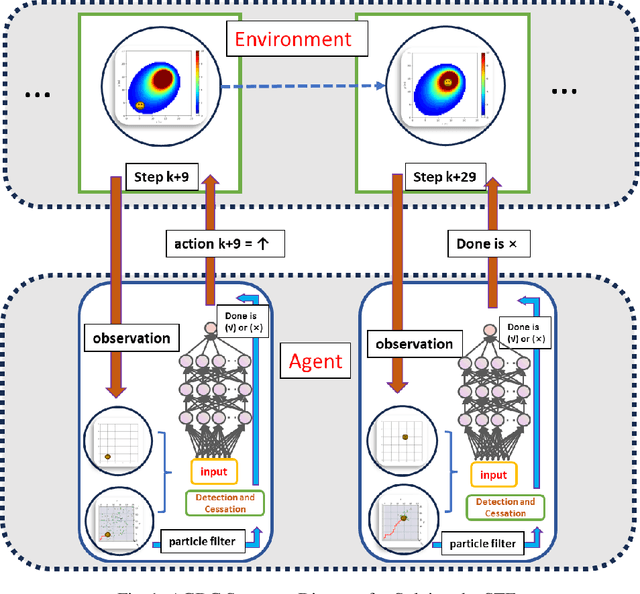
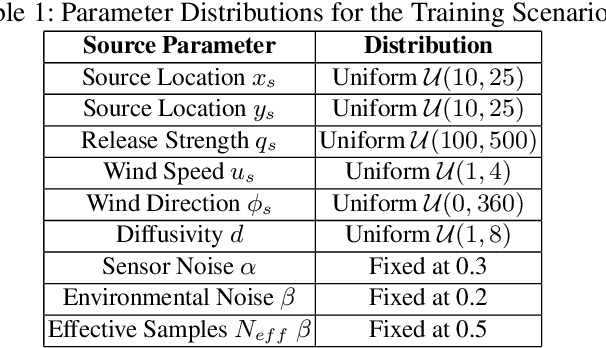
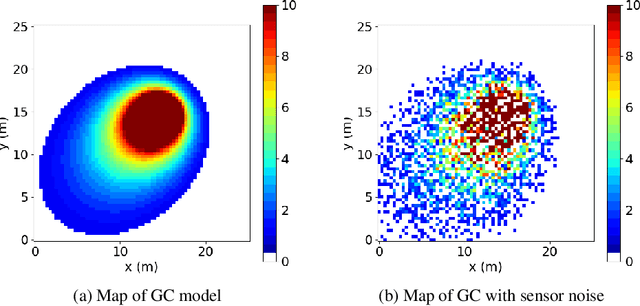
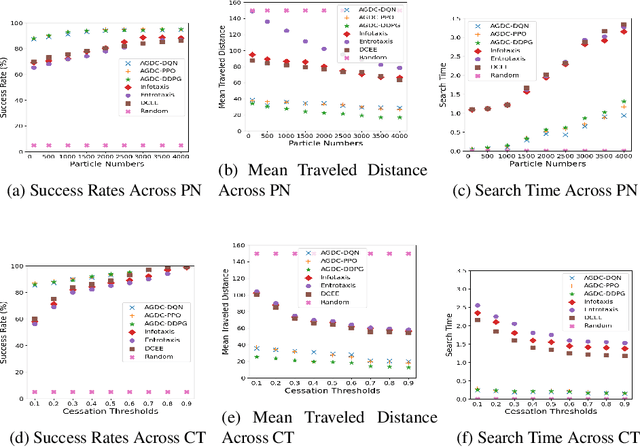
Reinforcement Learning has revolutionized decision-making processes in dynamic environments, yet it often struggles with autonomously detecting and achieving goals without clear feedback signals. For example, in a Source Term Estimation problem, the lack of precise environmental information makes it challenging to provide clear feedback signals and to define and evaluate how the source's location is determined. To address this challenge, the Autonomous Goal Detection and Cessation (AGDC) module was developed, enhancing various RL algorithms by incorporating a self-feedback mechanism for autonomous goal detection and cessation upon task completion. Our method effectively identifies and ceases undefined goals by approximating the agent's belief, significantly enhancing the capabilities of RL algorithms in environments with limited feedback. To validate effectiveness of our approach, we integrated AGDC with deep Q-Network, proximal policy optimization, and deep deterministic policy gradient algorithms, and evaluated its performance on the Source Term Estimation problem. The experimental results showed that AGDC-enhanced RL algorithms significantly outperformed traditional statistical methods such as infotaxis, entrotaxis, and dual control for exploitation and exploration, as well as a non-statistical random action selection method. These improvements were evident in terms of success rate, mean traveled distance, and search time, highlighting AGDC's effectiveness and efficiency in complex, real-world scenarios.
Bayesian estimation and reconstruction of marine surface contaminant dispersion
Sep 04, 2023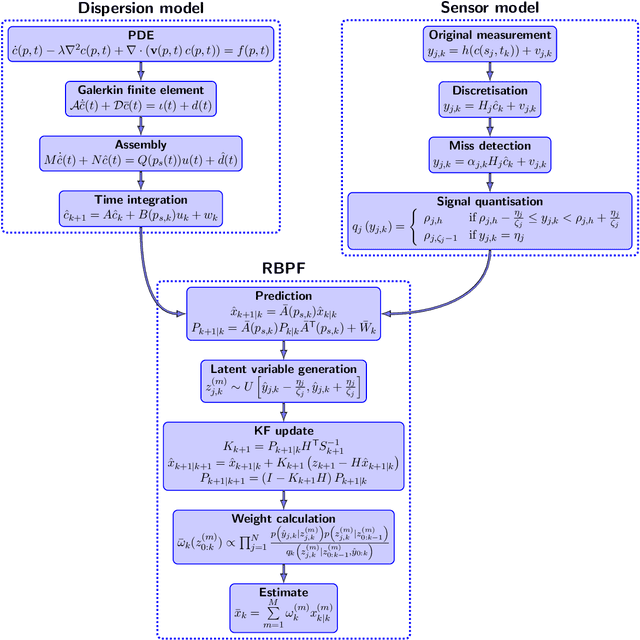
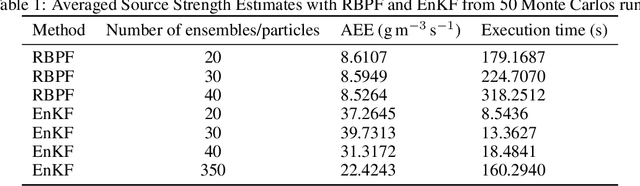
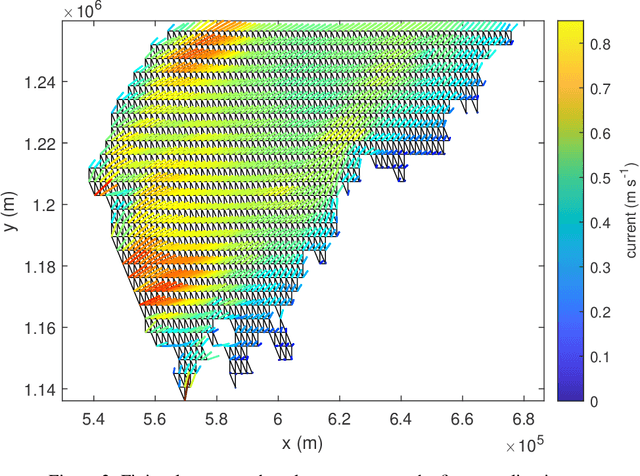
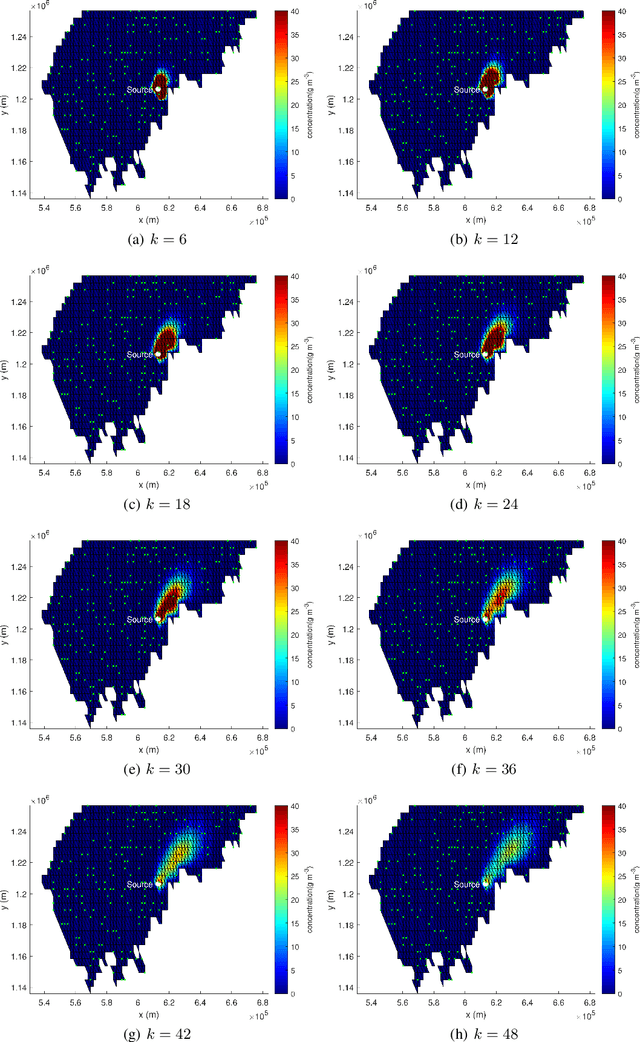
Discharge of hazardous substances into the marine environment poses a substantial risk to both public health and the ecosystem. In such incidents, it is imperative to accurately estimate the release strength of the source and reconstruct the spatio-temporal dispersion of the substances based on the collected measurements. In this study, we propose an integrated estimation framework to tackle this challenge, which can be used in conjunction with a sensor network or a mobile sensor for environment monitoring. We employ the fundamental convection-diffusion partial differential equation (PDE) to represent the general dispersion of a physical quantity in a non-uniform flow field. The PDE model is spatially discretised into a linear state-space model using the dynamic transient finite-element method (FEM) so that the characterisation of time-varying dispersion can be cast into the problem of inferring the model states from sensor measurements. We also consider imperfect sensing phenomena, including miss-detection and signal quantisation, which are frequently encountered when using a sensor network. This complicated sensor process introduces nonlinearity into the Bayesian estimation process. A Rao-Blackwellised particle filter (RBPF) is designed to provide an effective solution by exploiting the linear structure of the state-space model, whereas the nonlinearity of the measurement model can be handled by Monte Carlo approximation with particles. The proposed framework is validated using a simulated oil spill incident in the Baltic sea with real ocean flow data. The results show the efficacy of the developed spatio-temporal dispersion model and estimation schemes in the presence of imperfect measurements. Moreover, the parameter selection process is discussed, along with some comparison studies to illustrate the advantages of the proposed algorithm over existing methods.
Motion Planning for Aerial Pick-and-Place based on Geometric Feasibility Constraints
Jun 08, 2023This paper studies the motion planning problem of the pick-and-place of an aerial manipulator that consists of a quadcopter flying base and a Delta arm. We propose a novel partially decoupled motion planning framework to solve this problem. Compared to the state-of-the-art approaches, the proposed one has two novel features. First, it does not suffer from increased computation in high-dimensional configuration spaces. That is because it calculates the trajectories of the quadcopter base and the end-effector separately in the Cartesian space based on proposed geometric feasibility constraints. The geometric feasibility constraints can ensure the resulting trajectories satisfy the aerial manipulator's geometry. Second, collision avoidance for the Delta arm is achieved through an iterative approach based on a pinhole mapping method, so that the feasible trajectory can be found in an efficient manner. The proposed approach is verified by three experiments on a real aerial manipulation platform. The experimental results show the effectiveness of the proposed method for the aerial pick-and-place task.