 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePreGME: Prescribed Performance Control of Aerial Manipulators based on Variable-Gain ESO
Dec 28, 2025An aerial manipulator, comprising a multirotor base and a robotic arm, is subject to significant dynamic coupling between these two components. Therefore, achieving precise and robust motion control is a challenging yet important objective. Here, we propose a novel prescribed performance motion control framework based on variable-gain extended state observers (ESOs), referred to as PreGME. The method includes variable-gain ESOs for real-time estimation of dynamic coupling and a prescribed performance flight control that incorporates error trajectory constraints. Compared with existing methods, the proposed approach exhibits the following two characteristics. First, the adopted variable-gain ESOs can accurately estimate rapidly varying dynamic coupling. This enables the proposed method to handle manipulation tasks that require aggressive motion of the robotic arm. Second, by prescribing the performance, a preset error trajectory is generated to guide the system evolution along this trajectory. This strategy allows the proposed method to ensure the tracking error remains within the prescribed performance envelope, thereby achieving high-precision control. Experiments on a real platform, including aerial staff twirling, aerial mixology, and aerial cart-pulling experiments, are conducted to validate the effectiveness of the proposed method. Experimental results demonstrate that even under the dynamic coupling caused by rapid robotic arm motion (end-effector velocity: 1.02 m/s, acceleration: 5.10 m/s$^2$), the proposed method achieves high tracking performance.
Memory-Efficient 2D/3D Shape Assembly of Robot Swarms
Sep 30, 2025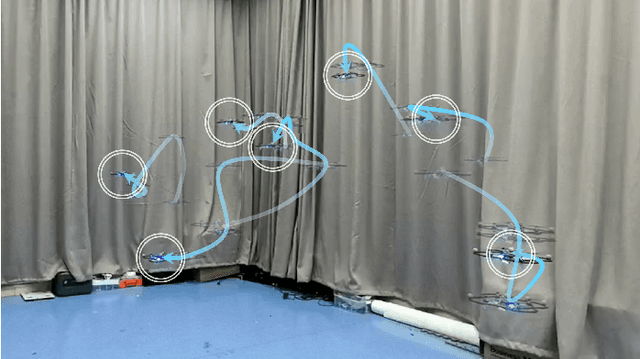
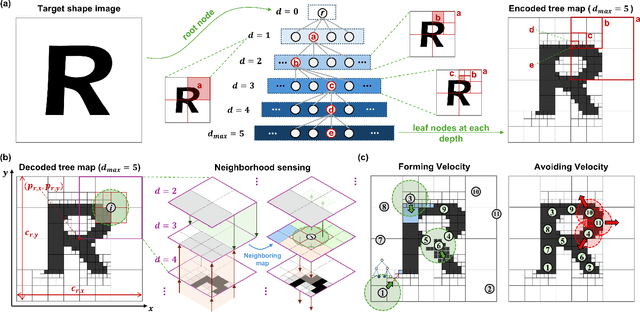
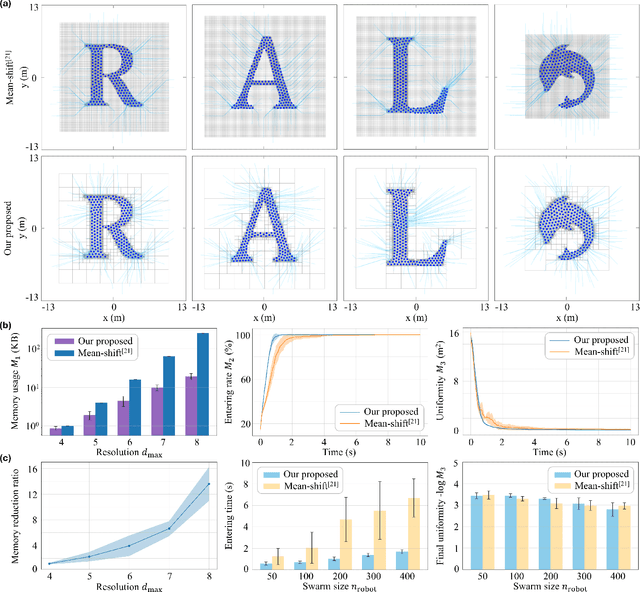
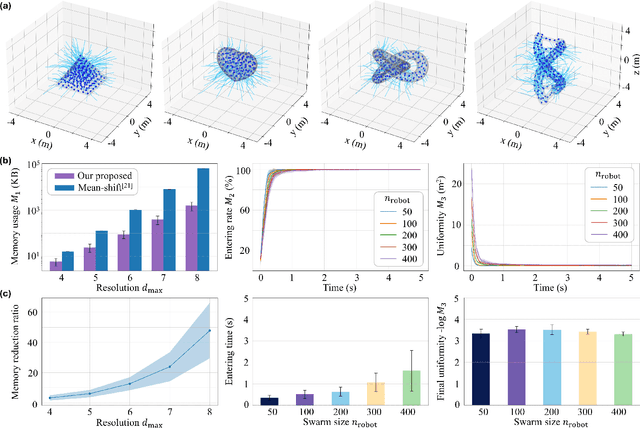
Mean-shift-based approaches have recently emerged as the most effective methods for robot swarm shape assembly tasks. These methods rely on image-based representations of target shapes to compute local density gradients and perform mean-shift exploration, which constitute their core mechanism. However, such image representations incur substantial memory overhead, which can become prohibitive for high-resolution or 3D shapes. To overcome this limitation, we propose a memory-efficient tree map representation that hierarchically encodes user-specified shapes and is applicable to both 2D and 3D scenarios. Building on this representation, we design a behavior-based distributed controller that enables assignment-free shape assembly. Comparative 2D and 3D simulations against a state-of-the-art mean-shift algorithm demonstrate one to two orders of magnitude lower memory usage and two to three times faster shape entry while maintaining comparable uniformity. Finally, we validate the framework through physical experiments with 6 to 7 UAVs, confirming its real-world practicality.
Predictive Kinematic Coordinate Control for Aerial Manipulators based on Modified Kinematics Learning
Mar 04, 2025High-precision manipulation has always been a developmental goal for aerial manipulators. This paper investigates the kinematic coordinate control issue in aerial manipulators. We propose a predictive kinematic coordinate control method, which includes a learning-based modified kinematic model and a model predictive control (MPC) scheme based on weight allocation. Compared to existing methods, our proposed approach offers several attractive features. First, the kinematic model incorporates closed-loop dynamics characteristics and online residual learning. Compared to methods that do not consider closed-loop dynamics and residuals, our proposed method has improved accuracy by 59.6$\%$. Second, a MPC scheme that considers weight allocation has been proposed, which can coordinate the motion strategies of quadcopters and manipulators. Compared to methods that do not consider weight allocation, the proposed method can meet the requirements of more tasks. The proposed approach is verified through complex trajectory tracking and moving target tracking experiments. The results validate the effectiveness of the proposed method.
Avian-Inspired High-Precision Tracking Control for Aerial Manipulators
Nov 17, 2024Aerial manipulators, composed of multirotors and robotic arms, have a structure and function highly reminiscent of avian species. This paper studies the tracking control problem for aerial manipulators. This paper studies the tracking control problem for aerial manipulators. We propose an avian-inspired aerial manipulation system, which includes an avian-inspired robotic arm design, a Recursive Newton-Euler (RNE) method-based nonlinear flight controller, and a coordinated controller with two modes. Compared to existing methods, our proposed approach offers several attractive features. First, the morphological characteristics of avian species are used to determine the size proportion of the multirotor and the robotic arm in the aerial manipulator. Second, the dynamic coupling of the aerial manipulator is addressed by the RNE-based flight controller and a dual-mode coordinated controller. Specifically, under our proposed algorithm, the aerial manipulator can stabilize the end-effector's pose, similar to avian head stabilization. The proposed approach is verified through three numerical experiments. The results show that even when the quadcopter is disturbed by different forces, the position error of the end-effector achieves millimeter-level accuracy, and the attitude error remains within 1 degree. The limitation of this work is not considering aggressive manipulation like that seen in birds. Addressing this through future studies that explore real-world experiments will be a key direction for research.
Motion Planning for Aerial Pick-and-Place based on Geometric Feasibility Constraints
Jun 08, 2023This paper studies the motion planning problem of the pick-and-place of an aerial manipulator that consists of a quadcopter flying base and a Delta arm. We propose a novel partially decoupled motion planning framework to solve this problem. Compared to the state-of-the-art approaches, the proposed one has two novel features. First, it does not suffer from increased computation in high-dimensional configuration spaces. That is because it calculates the trajectories of the quadcopter base and the end-effector separately in the Cartesian space based on proposed geometric feasibility constraints. The geometric feasibility constraints can ensure the resulting trajectories satisfy the aerial manipulator's geometry. Second, collision avoidance for the Delta arm is achieved through an iterative approach based on a pinhole mapping method, so that the feasible trajectory can be found in an efficient manner. The proposed approach is verified by three experiments on a real aerial manipulation platform. The experimental results show the effectiveness of the proposed method for the aerial pick-and-place task.