 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating Causal Effects using a Multi-task Deep Ensemble
Jan 26, 2023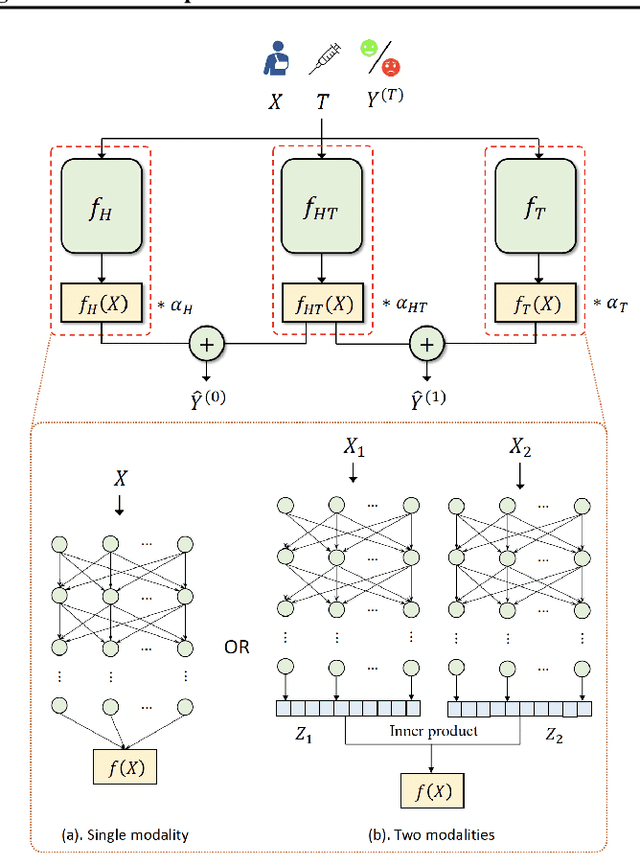



Over the past few decades, a number of methods have been proposed for causal effect estimation, yet few have been demonstrated to be effective in handling data with complex structures, such as images. To fill this gap, we propose a Causal Multi-task Deep Ensemble (CMDE) framework to learn both shared and group-specific information from the study population and prove its equivalence to a multi-task Gaussian process (GP) with coregionalization kernel a priori. Compared to multi-task GP, CMDE efficiently handles high-dimensional and multi-modal covariates and provides pointwise uncertainty estimates of causal effects. We evaluate our method across various types of datasets and tasks and find that CMDE outperforms state-of-the-art methods on a majority of these tasks.
Empirical Analysis of AI-based Energy Management in Electric Vehicles: A Case Study on Reinforcement Learning
Dec 18, 2022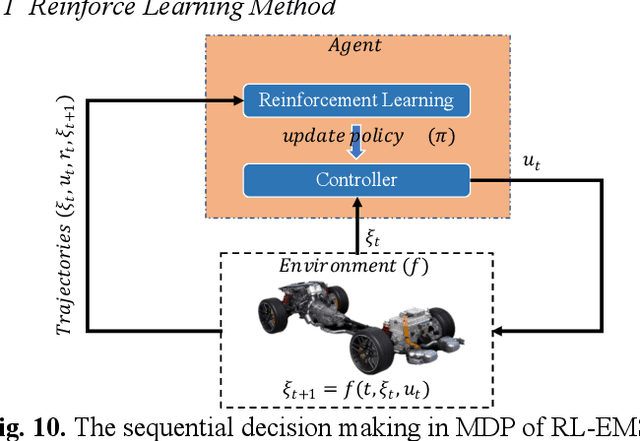
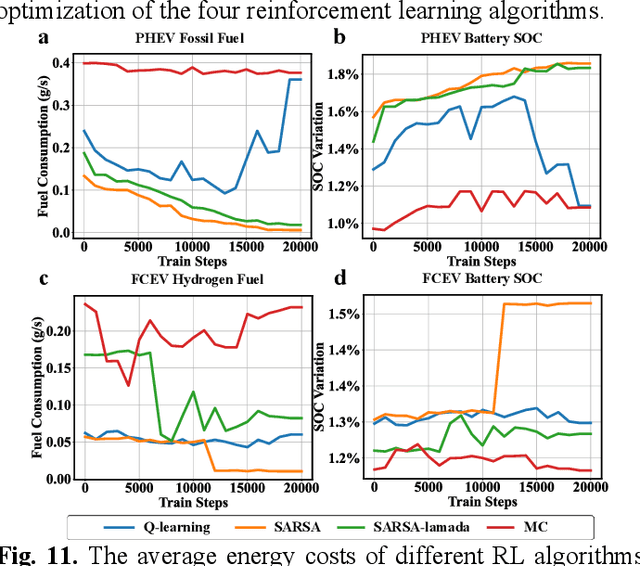
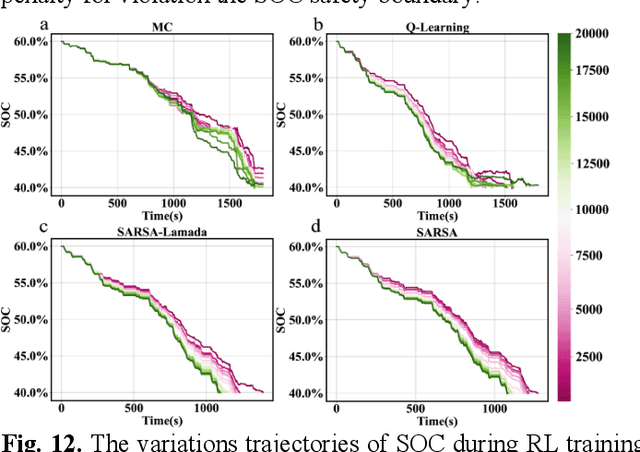
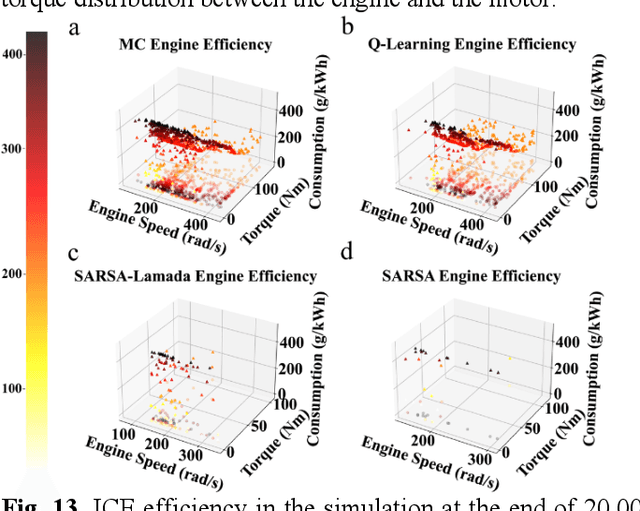
Reinforcement learning-based (RL-based) energy management strategy (EMS) is considered a promising solution for the energy management of electric vehicles with multiple power sources. It has been shown to outperform conventional methods in energy management problems regarding energy-saving and real-time performance. However, previous studies have not systematically examined the essential elements of RL-based EMS. This paper presents an empirical analysis of RL-based EMS in a Plug-in Hybrid Electric Vehicle (PHEV) and Fuel Cell Electric Vehicle (FCEV). The empirical analysis is developed in four aspects: algorithm, perception and decision granularity, hyperparameters, and reward function. The results show that the Off-policy algorithm effectively develops a more fuel-efficient solution within the complete driving cycle compared with other algorithms. Improving the perception and decision granularity does not produce a more desirable energy-saving solution but better balances battery power and fuel consumption. The equivalent energy optimization objective based on the instantaneous state of charge (SOC) variation is parameter sensitive and can help RL-EMSs to achieve more efficient energy-cost strategies.
Potential Auto-driving Threat: Universal Rain-removal Attack
Nov 18, 2022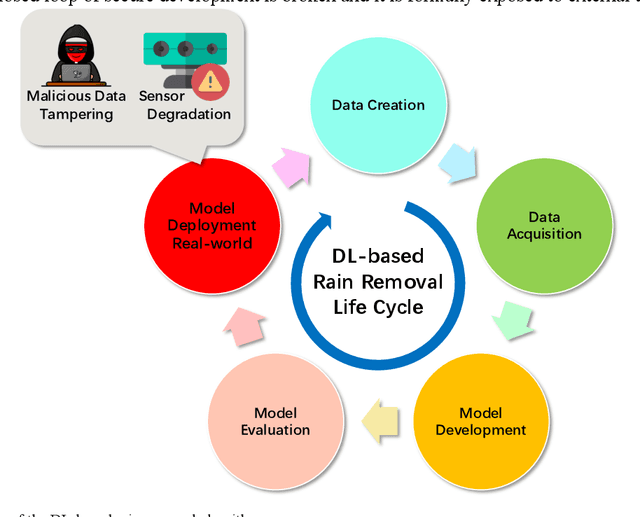
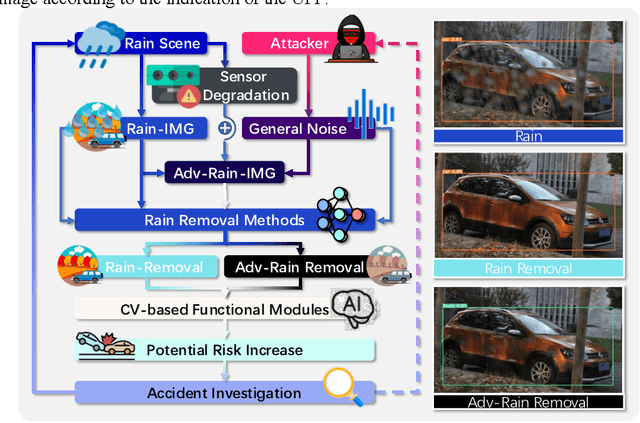
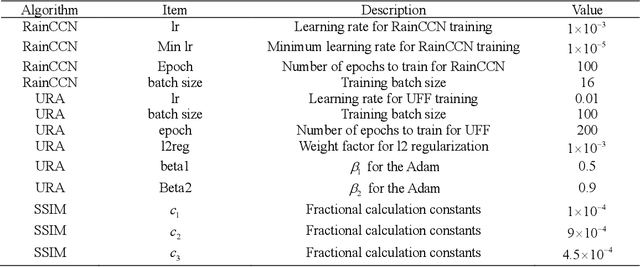
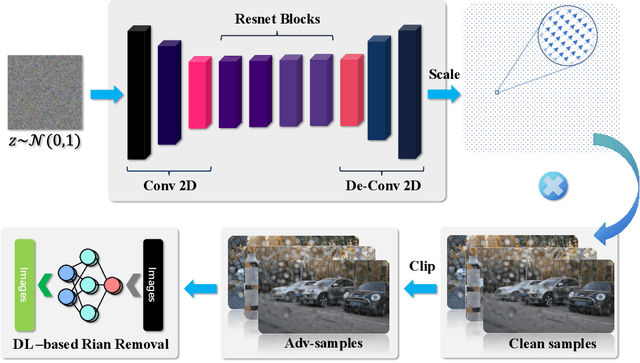
The problem of robustness in adverse weather conditions is considered a significant challenge for computer vision algorithms in the applicants of autonomous driving. Image rain removal algorithms are a general solution to this problem. They find a deep connection between raindrops/rain-streaks and images by mining the hidden features and restoring information about the rain-free environment based on the powerful representation capabilities of neural networks. However, previous research has focused on architecture innovations and has yet to consider the vulnerability issues that already exist in neural networks. This research gap hints at a potential security threat geared toward the intelligent perception of autonomous driving in the rain. In this paper, we propose a universal rain-removal attack (URA) on the vulnerability of image rain-removal algorithms by generating a non-additive spatial perturbation that significantly reduces the similarity and image quality of scene restoration. Notably, this perturbation is difficult to recognise by humans and is also the same for different target images. Thus, URA could be considered a critical tool for the vulnerability detection of image rain-removal algorithms. It also could be developed as a real-world artificial intelligence attack method. Experimental results show that URA can reduce the scene repair capability by 39.5% and the image generation quality by 26.4%, targeting the state-of-the-art (SOTA) single-image rain-removal algorithms currently available.
Progress and summary of reinforcement learning on energy management of MPS-EV
Nov 08, 2022The high emission and low energy efficiency caused by internal combustion engines (ICE) have become unacceptable under environmental regulations and the energy crisis. As a promising alternative solution, multi-power source electric vehicles (MPS-EVs) introduce different clean energy systems to improve powertrain efficiency. The energy management strategy (EMS) is a critical technology for MPS-EVs to maximize efficiency, fuel economy, and range. Reinforcement learning (RL) has become an effective methodology for the development of EMS. RL has received continuous attention and research, but there is still a lack of systematic analysis of the design elements of RL-based EMS. To this end, this paper presents an in-depth analysis of the current research on RL-based EMS (RL-EMS) and summarizes the design elements of RL-based EMS. This paper first summarizes the previous applications of RL in EMS from five aspects: algorithm, perception scheme, decision scheme, reward function, and innovative training method. The contribution of advanced algorithms to the training effect is shown, the perception and control schemes in the literature are analyzed in detail, different reward function settings are classified, and innovative training methods with their roles are elaborated. Finally, by comparing the development routes of RL and RL-EMS, this paper identifies the gap between advanced RL solutions and existing RL-EMS. Finally, this paper suggests potential development directions for implementing advanced artificial intelligence (AI) solutions in EMS.
A novel learning-based robust model predictive control energy management strategy for fuel cell electric vehicles
Sep 12, 2022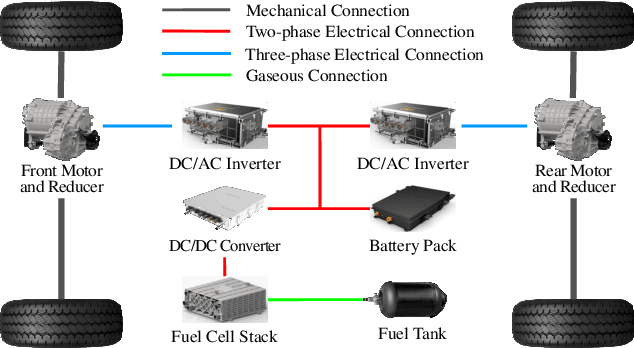
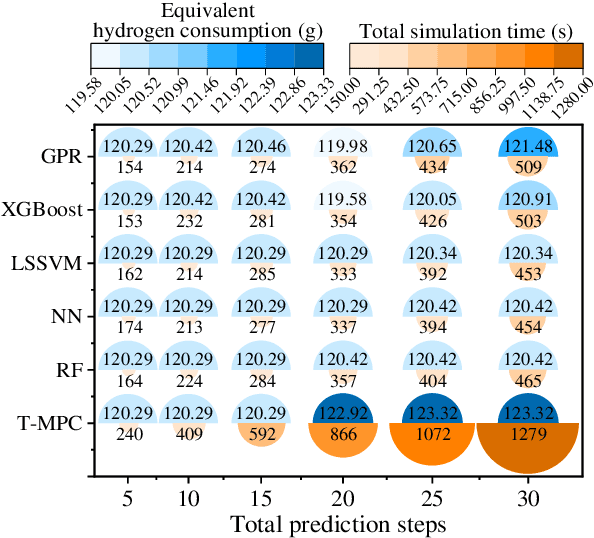
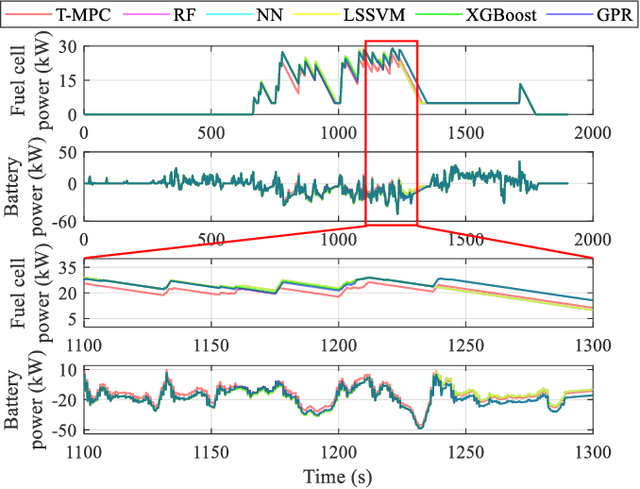
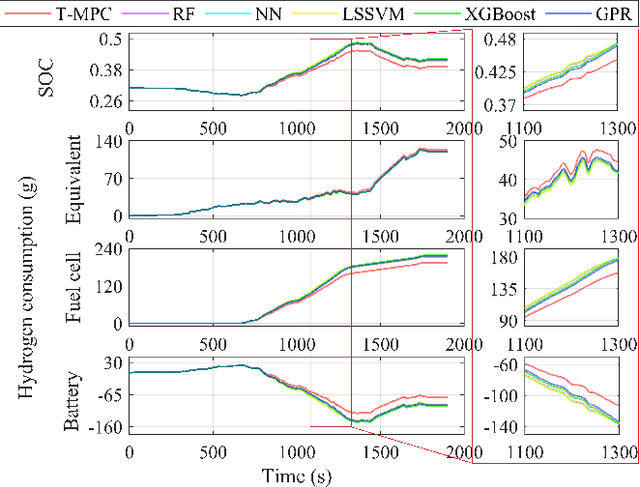
The multi-source electromechanical coupling makes the energy management of fuel cell electric vehicles (FCEVs) relatively nonlinear and complex especially in the types of 4-wheel-drive (4WD) FCEVs. Accurate state observing for complicated nonlinear system is the basis for fantastic energy managing in FCEVs. Aiming at releasing the energy-saving potential of FCEVs, a novel learning-based robust model predictive control (LRMPC) strategy is proposed for a 4WD FCEV, contributing to suitable power distribution among multiple energy sources. The well-designed strategy based on machine learning (ML) translates the knowledge of the nonlinear system to the explicit controlling scheme with superior robust performance. To start with, ML methods with high regression accuracy and superior generalization ability are trained offline to establish the precise state observer for SOC. Then, explicit data tables for SOC generated by state observer are used for grabbing accurate state changing, whose input features include the vehicle status and the states of vehicle components. To be specific, the vehicle velocity estimation for providing future speed reference is constructed by deep forest. Next, the components including explicit data tables and vehicle velocity estimation are combined with model predictive control (MPC) to release the state-of-the-art energy-saving ability for the multi-freedom system in FCEVs, whose name is LRMPC. At last, the detailed assessment is performed in simulation test to validate the advancing performance of LRMPC. The corresponding results highlight the optimal control effect in energy-saving potential and strong real-time application ability of LRMPC.
Hierarchical Graph Pooling is an Effective Citywide Traffic Condition Prediction Model
Sep 08, 2022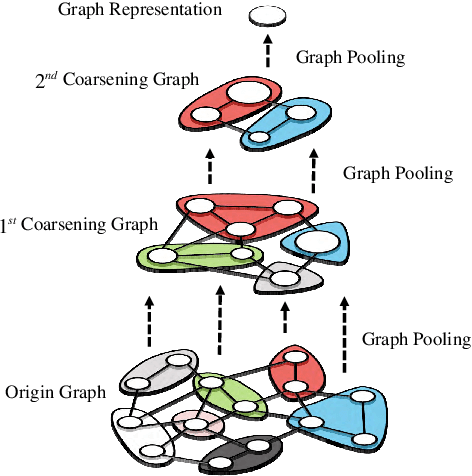
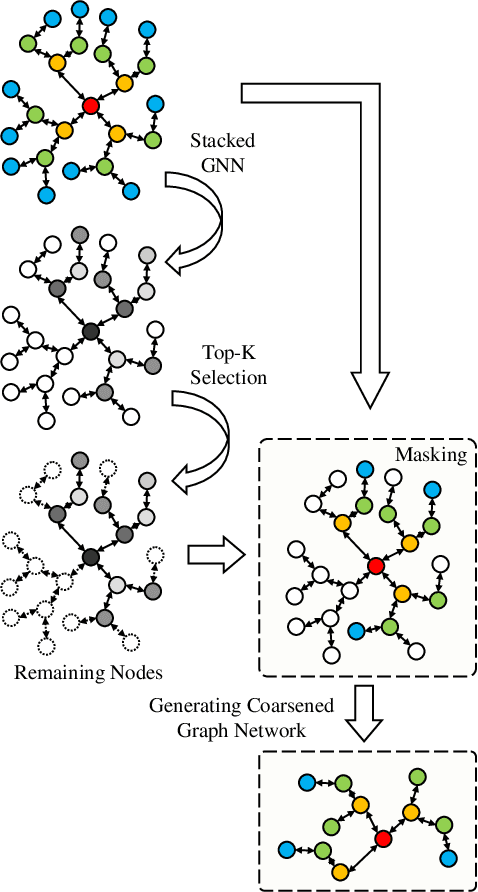
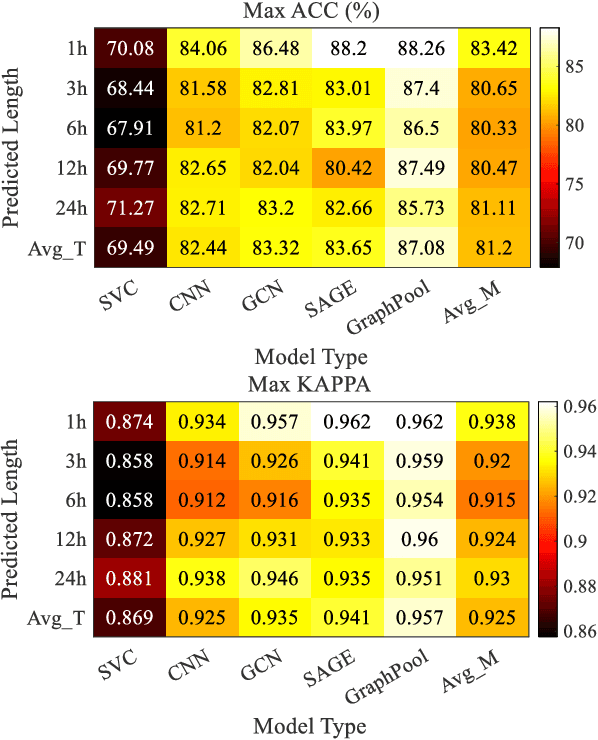
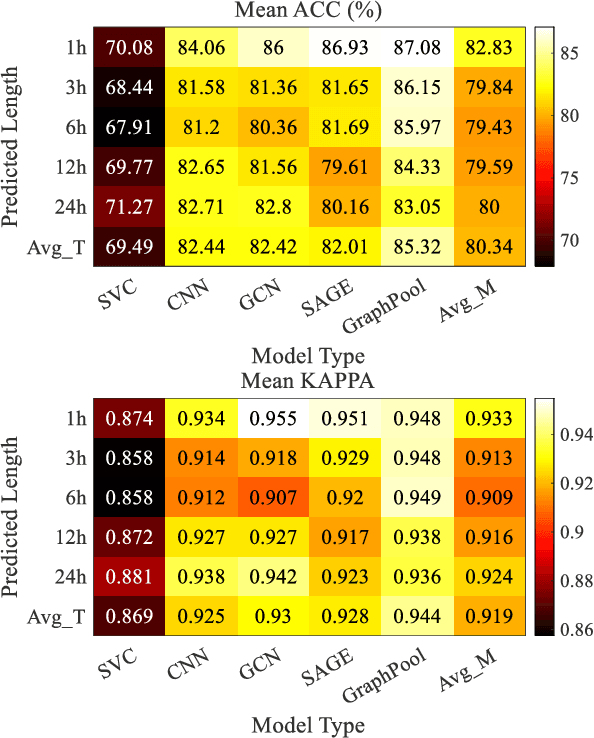
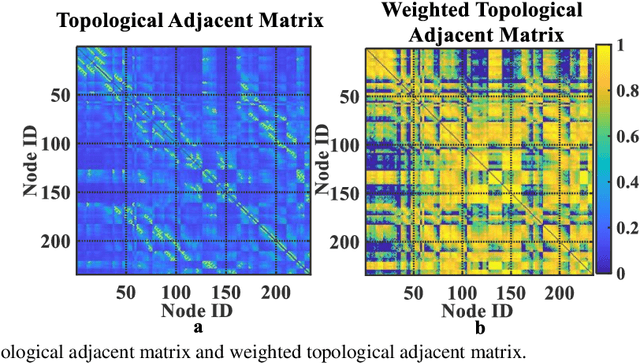
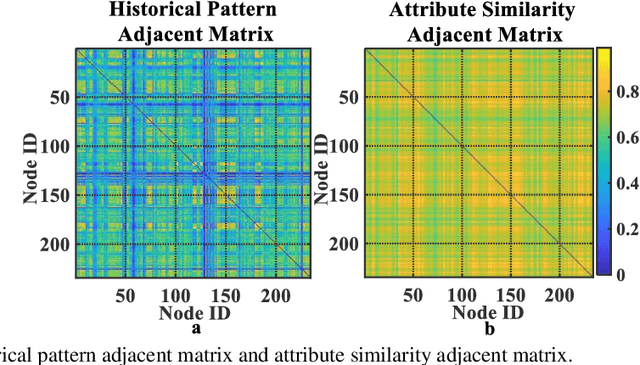
Accurate traffic conditions prediction provides a solid foundation for vehicle-environment coordination and traffic control tasks. Because of the complexity of road network data in spatial distribution and the diversity of deep learning methods, it becomes challenging to effectively define traffic data and adequately capture the complex spatial nonlinear features in the data. This paper applies two hierarchical graph pooling approaches to the traffic prediction task to reduce graph information redundancy. First, this paper verifies the effectiveness of hierarchical graph pooling methods in traffic prediction tasks. The hierarchical graph pooling methods are contrasted with the other baselines on predictive performance. Second, two mainstream hierarchical graph pooling methods, node clustering pooling and node drop pooling, are applied to analyze advantages and weaknesses in traffic prediction. Finally, for the mentioned graph neural networks, this paper compares the predictive effects of different graph network inputs on traffic prediction accuracy. The efficient ways of defining graph networks are analyzed and summarized.
Transfer Learning and Vision Transformer based State-of-Health prediction of Lithium-Ion Batteries
Sep 07, 2022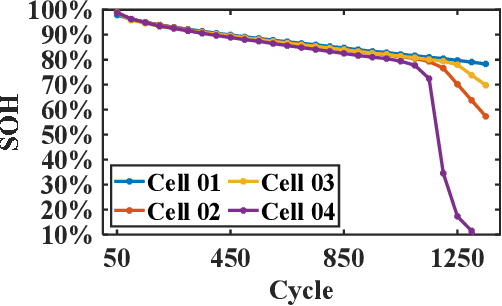
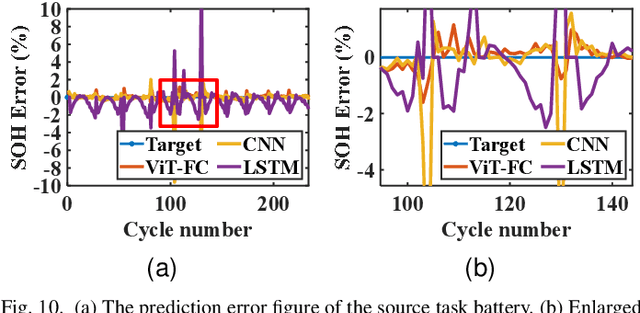
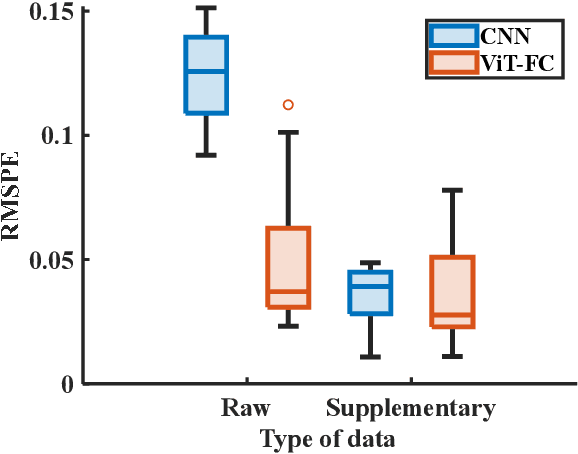
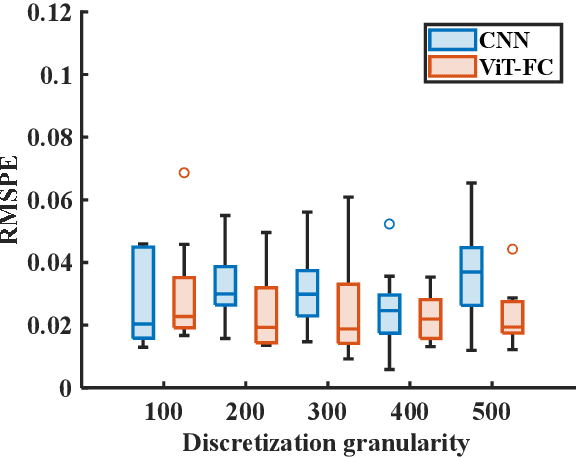
In recent years, significant progress has been made in transportation electrification. And lithium-ion batteries (LIB), as the main energy storage devices, have received widespread attention. Accurately predicting the state of health (SOH) can not only ease the anxiety of users about the battery life but also provide important information for the management of the battery. This paper presents a prediction method for SOH based on Vision Transformer (ViT) model. First, discrete charging data of a predefined voltage range is used as an input data matrix. Then, the cycle features of the battery are captured by the ViT which can obtain the global features, and the SOH is obtained by combining the cycle features with the full connection (FC) layer. At the same time, transfer learning (TL) is introduced, and the prediction model based on source task battery training is further fine-tuned according to the early cycle data of the target task battery to provide an accurate prediction. Experiments show that our method can obtain better feature expression compared with existing deep learning methods so that better prediction effect and transfer effect can be achieved.
Spatial-Temporal Feature Extraction and Evaluation Network for Citywide Traffic Condition Prediction
Jul 22, 2022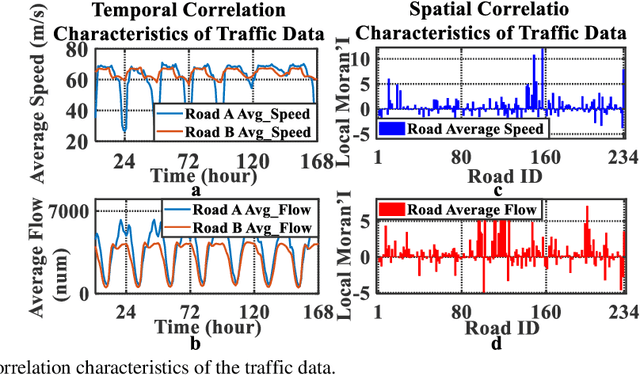
Traffic prediction plays an important role in the realization of traffic control and scheduling tasks in intelligent transportation systems. With the diversification of data sources, reasonably using rich traffic data to model the complex spatial-temporal dependence and nonlinear characteristics in traffic flow are the key challenge for intelligent transportation system. In addition, clearly evaluating the importance of spatial-temporal features extracted from different data becomes a challenge. A Double Layer - Spatial Temporal Feature Extraction and Evaluation (DL-STFEE) model is proposed. The lower layer of DL-STFEE is spatial-temporal feature extraction layer. The spatial and temporal features in traffic data are extracted by multi-graph graph convolution and attention mechanism, and different combinations of spatial and temporal features are generated. The upper layer of DL-STFEE is the spatial-temporal feature evaluation layer. Through the attention score matrix generated by the high-dimensional self-attention mechanism, the spatial-temporal features combinations are fused and evaluated, so as to get the impact of different combinations on prediction effect. Three sets of experiments are performed on actual traffic datasets to show that DL-STFEE can effectively capture the spatial-temporal features and evaluate the importance of different spatial-temporal feature combinations.
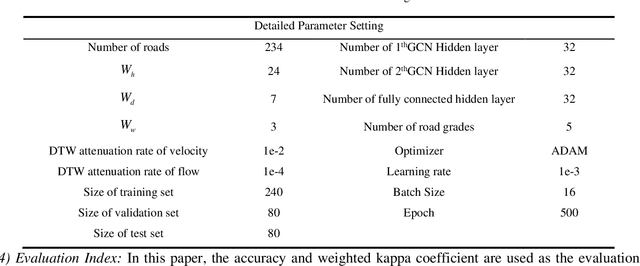
A Transferable Intersection Reconstruction Network for Traffic Speed Prediction
Jul 22, 2022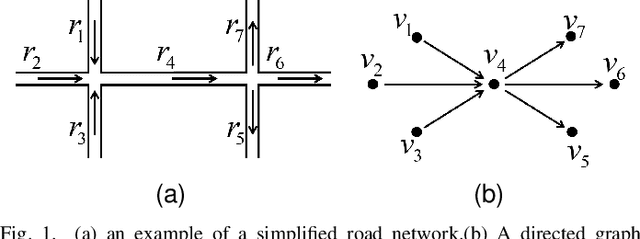
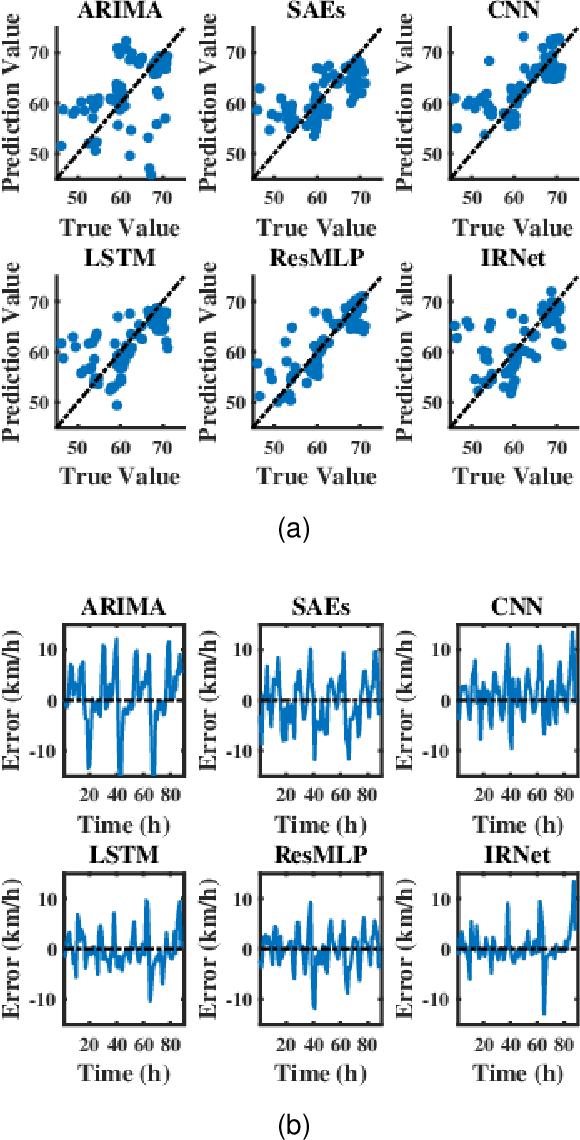
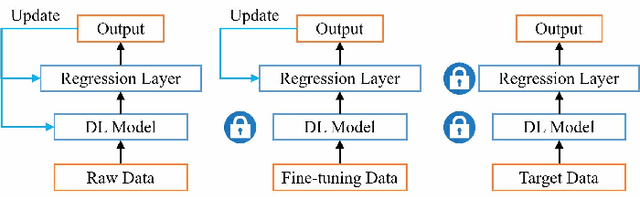
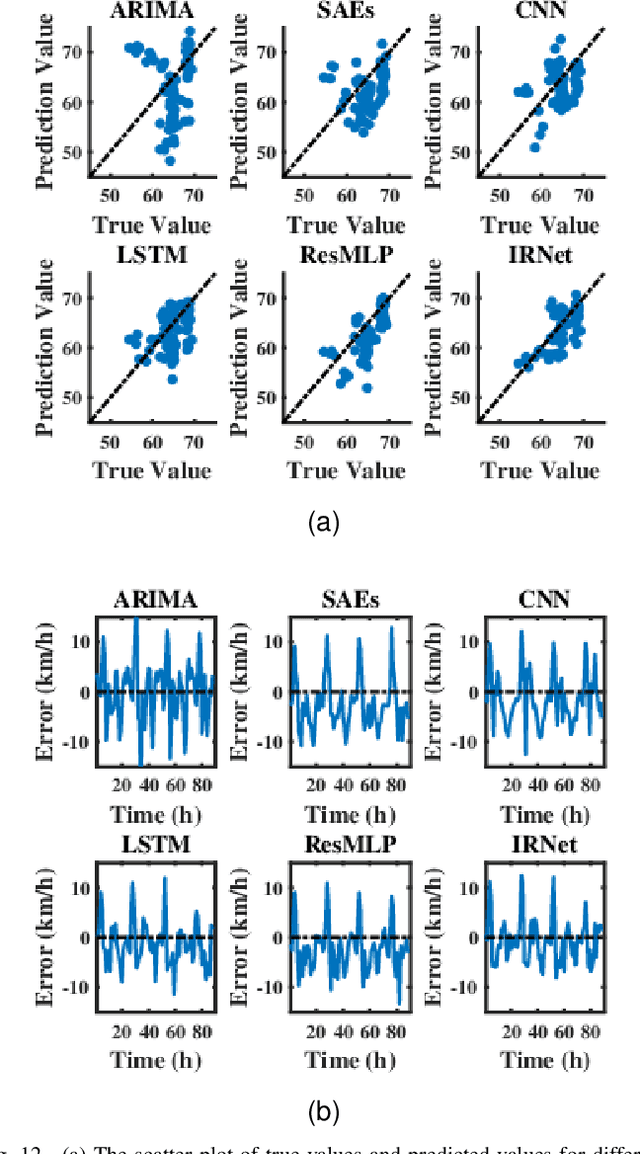
Traffic speed prediction is the key to many valuable applications, and it is also a challenging task because of its various influencing factors. Recent work attempts to obtain more information through various hybrid models, thereby improving the prediction accuracy. However, the spatial information acquisition schemes of these methods have two-level differentiation problems. Either the modeling is simple but contains little spatial information, or the modeling is complete but lacks flexibility. In order to introduce more spatial information on the basis of ensuring flexibility, this paper proposes IRNet (Transferable Intersection Reconstruction Network). First, this paper reconstructs the intersection into a virtual intersection with the same structure, which simplifies the topology of the road network. Then, the spatial information is subdivided into intersection information and sequence information of traffic flow direction, and spatiotemporal features are obtained through various models. Third, a self-attention mechanism is used to fuse spatiotemporal features for prediction. In the comparison experiment with the baseline, not only the prediction effect, but also the transfer performance has obvious advantages.