 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgentSchool: An LLM-Powered Multi-Agent Simulation for Education
May 28, 2026Despite the rapid deployment of LLMs into classrooms, validating educational AI remains uniquely intractable: interventions act on developing learners whose cognitive and social trajectories are irreversibly shaped, while real-world trials are slow, ethically constrained, and institutionally locked. LLM-based educational simulators have emerged as a potential remedy, but many still collapse learning into persona-conditioned role-play and, when optimized only to reproduce existing classrooms, can structurally penalize the institutional novelty that pedagogical reform requires. In this work, we introduce AgentSchool, an LLM-driven multi-agent simulator that models learning as state transition rather than prompted behavior. AgentSchool couples cognitively growable student agents -- equipped with weighted subject knowledge graphs, thinking-workflow pools, and explicit misconceptions -- with adaptive teacher agents that plan, scaffold, and reflect along the Zone of Proximal Development, embedded in a configurable scenery generator that situates instruction within both formal and informal learning fields, and a multi-scale simulator that decouples interaction scale, temporal granularity, and simulation duration. Experiments show that structured student agents produce more differentiated mastery and misconception traces than a baseline simulator, while teacher-agent comparisons show backbone-dependent patterns consistent with ZPD-informed adaptation. Further, AgentSchool generates plausible traces of peripheral participation, clique formation, aggressor-induced cohesion, and opinion-leader emergence consistent with classroom social theories. Beyond its role as an educational research instrument, AgentSchool frames education as a socially meaningful testbed for long-horizon memory, multi-agent coordination, and future institutional reasoning under organizational pressure.
A Unified Candidate Set with Scene-Adaptive Refinement via Diffusion for End-to-End Autonomous Driving
Feb 03, 2026End-to-end autonomous driving is increasingly adopting a multimodal planning paradigm that generates multiple trajectory candidates and selects the final plan, making candidate-set design critical. A fixed trajectory vocabulary provides stable coverage in routine driving but often misses optimal solutions in complex interactions, while scene-adaptive refinement can cause over-correction in simple scenarios by unnecessarily perturbing already strong vocabulary trajectories.We propose CdDrive, which preserves the original vocabulary candidates and augments them with scene-adaptive candidates generated by vocabulary-conditioned diffusion denoising. Both candidate types are jointly scored by a shared selection module, enabling reliable performance across routine and highly interactive scenarios. We further introduce HATNA (Horizon-Aware Trajectory Noise Adapter) to improve the smoothness and geometric continuity of diffusion candidates via temporal smoothing and horizon-aware noise modulation. Experiments on NAVSIM v1 and NAVSIM v2 demonstrate leading performance, and ablations verify the contribution of each component.
CURVE: Learning Causality-Inspired Invariant Representations for Robust Scene Understanding via Uncertainty-Guided Regularization
Jan 28, 2026Scene graphs provide structured abstractions for scene understanding, yet they often overfit to spurious correlations, severely hindering out-of-distribution generalization. To address this limitation, we propose CURVE, a causality-inspired framework that integrates variational uncertainty modeling with uncertainty-guided structural regularization to suppress high-variance, environment-specific relations. Specifically, we apply prototype-conditioned debiasing to disentangle invariant interaction dynamics from environment-dependent variations, promoting a sparse and domain-stable topology. Empirically, we evaluate CURVE in zero-shot transfer and low-data sim-to-real adaptation, verifying its ability to learn domain-stable sparse topologies and provide reliable uncertainty estimates to support risk prediction under distribution shifts.
SKANet: A Cognitive Dual-Stream Framework with Adaptive Modality Fusion for Robust Compound GNSS Interference Classification
Jan 19, 2026As the electromagnetic environment becomes increasingly complex, Global Navigation Satellite Systems (GNSS) face growing threats from sophisticated jamming interference. Although Deep Learning (DL) effectively identifies basic interference, classifying compound interference remains difficult due to the superposition of diverse jamming sources. Existing single-domain approaches often suffer from performance degradation because transient burst signals and continuous global signals require conflicting feature extraction scales. We propose the Selective Kernel and Asymmetric convolution Network(SKANet), a cognitive deep learning framework built upon a dual-stream architecture that integrates Time-Frequency Images (TFIs) and Power Spectral Density (PSD). Distinct from conventional fusion methods that rely on static receptive fields, the proposed architecture incorporates a Multi-Branch Selective Kernel (SK) module combined with Asymmetric Convolution Blocks (ACBs). This mechanism enables the network to dynamically adjust its receptive fields, acting as an adaptive filter that simultaneously captures micro-scale transient features and macro-scale spectral trends within entangled compound signals. To complement this spatial-temporal adaptation, a Squeeze-and-Excitation (SE) mechanism is integrated at the fusion stage to adaptively recalibrate the contribution of heterogeneous features from each modality. Evaluations on a dataset of 405,000 samples demonstrate that SKANet achieves an overall accuracy of 96.99\%, exhibiting superior robustness for compound jamming classification, particularly under low Jamming-to-Noise Ratio (JNR) regimes.
Driving in Corner Case: A Real-World Adversarial Closed-Loop Evaluation Platform for End-to-End Autonomous Driving
Dec 18, 2025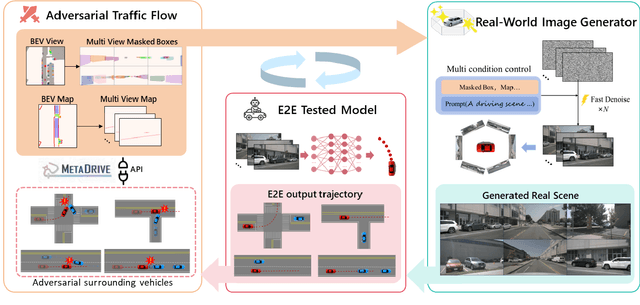
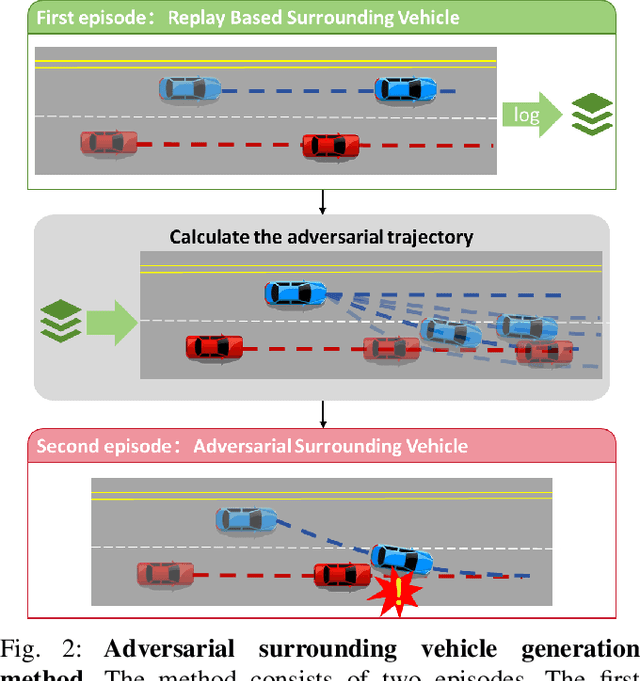
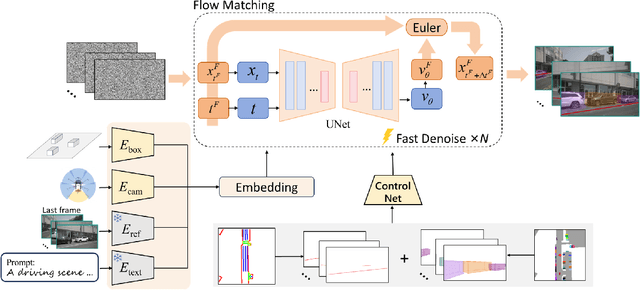
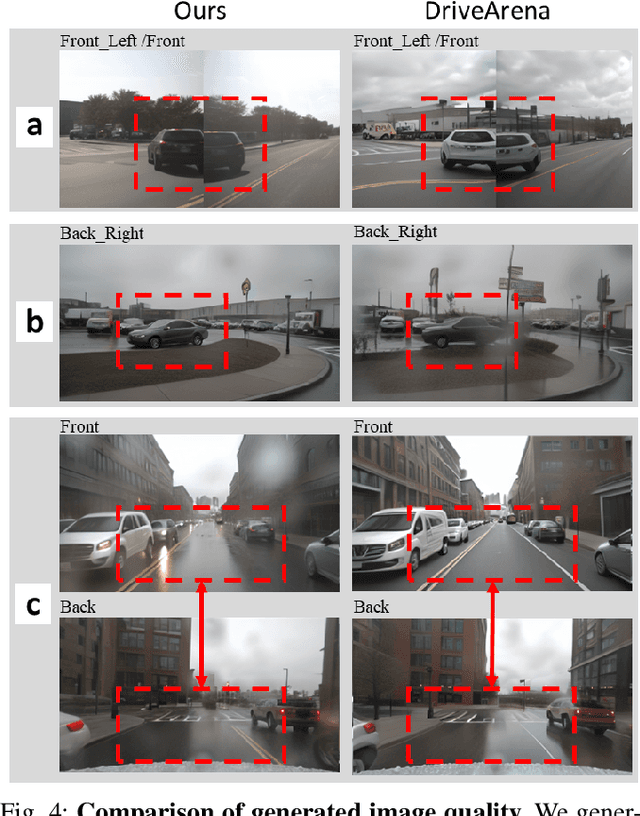
Safety-critical corner cases, difficult to collect in the real world, are crucial for evaluating end-to-end autonomous driving. Adversarial interaction is an effective method to generate such safety-critical corner cases. While existing adversarial evaluation methods are built for models operating in simplified simulation environments, adversarial evaluation for real-world end-to-end autonomous driving has been little explored. To address this challenge, we propose a closed-loop evaluation platform for end-to-end autonomous driving, which can generate adversarial interactions in real-world scenes. In our platform, the real-world image generator cooperates with an adversarial traffic policy to evaluate various end-to-end models trained on real-world data. The generator, based on flow matching, efficiently and stably generates real-world images according to the traffic environment information. The efficient adversarial surrounding vehicle policy is designed to model challenging interactions and create corner cases that current autonomous driving systems struggle to handle. Experimental results demonstrate that the platform can generate realistic driving images efficiently. Through evaluating the end-to-end models such as UniAD and VAD, we demonstrate that based on the adversarial policy, our platform evaluates the performance degradation of the tested model in corner cases. This result indicates that this platform can effectively detect the model's potential issues, which will facilitate the safety and robustness of end-to-end autonomous driving.
Chain-of-Thought for Autonomous Driving: A Comprehensive Survey and Future Prospects
May 26, 2025The rapid evolution of large language models in natural language processing has substantially elevated their semantic understanding and logical reasoning capabilities. Such proficiencies have been leveraged in autonomous driving systems, contributing to significant improvements in system performance. Models such as OpenAI o1 and DeepSeek-R1, leverage Chain-of-Thought (CoT) reasoning, an advanced cognitive method that simulates human thinking processes, demonstrating remarkable reasoning capabilities in complex tasks. By structuring complex driving scenarios within a systematic reasoning framework, this approach has emerged as a prominent research focus in autonomous driving, substantially improving the system's ability to handle challenging cases. This paper investigates how CoT methods improve the reasoning abilities of autonomous driving models. Based on a comprehensive literature review, we present a systematic analysis of the motivations, methodologies, challenges, and future research directions of CoT in autonomous driving. Furthermore, we propose the insight of combining CoT with self-learning to facilitate self-evolution in driving systems. To ensure the relevance and timeliness of this study, we have compiled a dynamic repository of literature and open-source projects, diligently updated to incorporate forefront developments. The repository is publicly available at https://github.com/cuiyx1720/Awesome-CoT4AD.
ARTEMIS: Autoregressive End-to-End Trajectory Planning with Mixture of Experts for Autonomous Driving
Apr 28, 2025This paper presents ARTEMIS, an end-to-end autonomous driving framework that combines autoregressive trajectory planning with Mixture-of-Experts (MoE). Traditional modular methods suffer from error propagation, while existing end-to-end models typically employ static one-shot inference paradigms that inadequately capture the dynamic changes of the environment. ARTEMIS takes a different method by generating trajectory waypoints sequentially, preserves critical temporal dependencies while dynamically routing scene-specific queries to specialized expert networks. It effectively relieves trajectory quality degradation issues encountered when guidance information is ambiguous, and overcomes the inherent representational limitations of singular network architectures when processing diverse driving scenarios. Additionally, we use a lightweight batch reallocation strategy that significantly improves the training speed of the Mixture-of-Experts model. Through experiments on the NAVSIM dataset, ARTEMIS exhibits superior competitive performance, achieving 87.0 PDMS and 83.1 EPDMS with ResNet-34 backbone, demonstrates state-of-the-art performance on multiple metrics.
Co-MTP: A Cooperative Trajectory Prediction Framework with Multi-Temporal Fusion for Autonomous Driving
Feb 25, 2025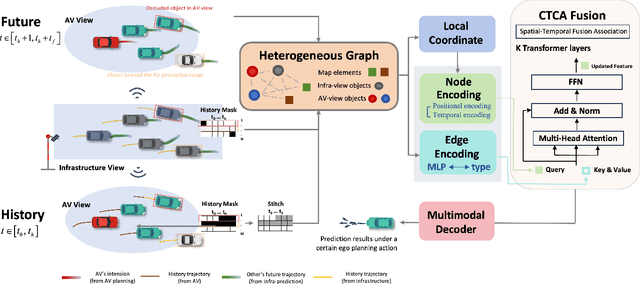
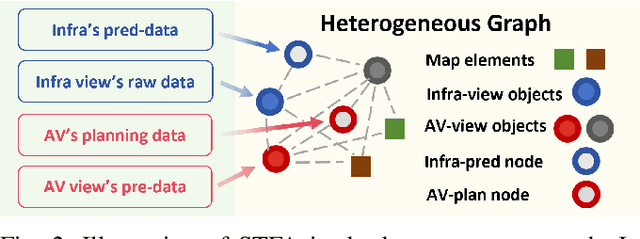
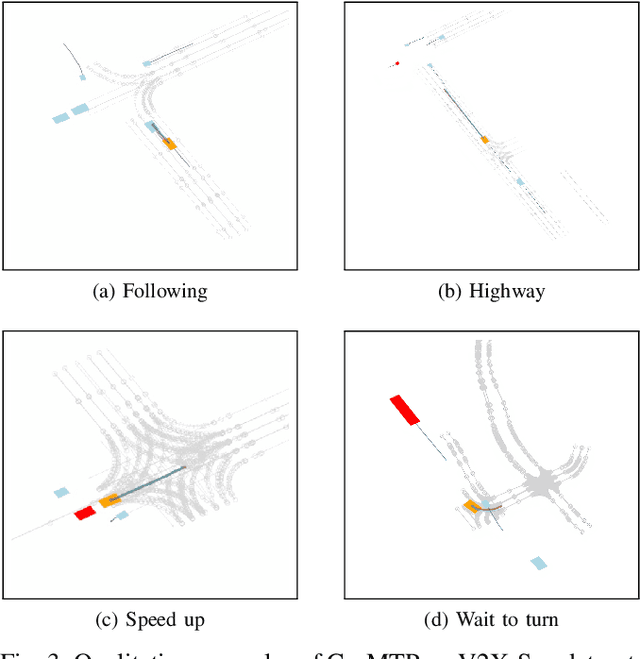

Vehicle-to-everything technologies (V2X) have become an ideal paradigm to extend the perception range and see through the occlusion. Exiting efforts focus on single-frame cooperative perception, however, how to capture the temporal cue between frames with V2X to facilitate the prediction task even the planning task is still underexplored. In this paper, we introduce the Co-MTP, a general cooperative trajectory prediction framework with multi-temporal fusion for autonomous driving, which leverages the V2X system to fully capture the interaction among agents in both history and future domains to benefit the planning. In the history domain, V2X can complement the incomplete history trajectory in single-vehicle perception, and we design a heterogeneous graph transformer to learn the fusion of the history feature from multiple agents and capture the history interaction. Moreover, the goal of prediction is to support future planning. Thus, in the future domain, V2X can provide the prediction results of surrounding objects, and we further extend the graph transformer to capture the future interaction among the ego planning and the other vehicles' intentions and obtain the final future scenario state under a certain planning action. We evaluate the Co-MTP framework on the real-world dataset V2X-Seq, and the results show that Co-MTP achieves state-of-the-art performance and that both history and future fusion can greatly benefit prediction.
Sustainable Adaptation for Autonomous Driving with the Mixture of Progressive Experts Networ
Feb 09, 2025



Learning-based autonomous driving methods require continuous acquisition of domain knowledge to adapt to diverse driving scenarios. However, due to the inherent challenges of long-tailed data distribution, current approaches still face limitations in complex and dynamic driving environments, particularly when encountering new scenarios and data. This underscores the necessity for enhanced continual learning capabilities to improve system adaptability. To address these challenges, the paper introduces a dynamic progressive optimization framework that facilitates adaptation to variations in dynamic environments, achieved by integrating reinforcement learning and supervised learning for data aggregation. Building on this framework, we propose the Mixture of Progressive Experts (MoPE) network. The proposed method selectively activates multiple expert models based on the distinct characteristics of each task and progressively refines the network architecture to facilitate adaptation to new tasks. Simulation results show that the MoPE model outperforms behavior cloning methods, achieving up to a 7.3% performance improvement in intricate urban road environments.
Quantitative Representation of Scenario Difficulty for Autonomous Driving Based on Adversarial Policy Search
Aug 26, 2024Adversarial scenario generation is crucial for autonomous driving testing because it can efficiently simulate various challenge and complex traffic conditions. However, it is difficult to control current existing methods to generate desired scenarios, such as the ones with different conflict levels. Therefore, this paper proposes a data-driven quantitative method to represent scenario difficulty. Compared with rule-based discrete scenario difficulty representation method, the proposed algorithm can achieve continuous difficulty representation. Specifically, the environment agent is introduced, and a reinforcement learning method combined with mechanism knowledge is constructed for policy search to obtain an agent with adversarial behavior. The model parameters of the environment agent at different stages in the training process are extracted to construct a policy group, and then the agents with different adversarial intensity are obtained, which are used to realize data generation in different difficulty scenarios through the simulation environment. Finally, a data-driven scenario difficulty quantitative representation model is constructed, which is used to output the environment agent policy under different difficulties. The result analysis shows that the proposed algorithm can generate reasonable and interpretable scenarios with high discrimination, and can provide quantifiable difficulty representation without any expert logic rule design. The video link is https://www.youtube.com/watch?v=GceGdqAm9Ys.