 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatiotemporal Contrastive Learning for Cross-View Video Localization in Unstructured Off-road Terrains
Jun 05, 2025Robust cross-view 3-DoF localization in GPS-denied, off-road environments remains challenging due to (1) perceptual ambiguities from repetitive vegetation and unstructured terrain, and (2) seasonal shifts that significantly alter scene appearance, hindering alignment with outdated satellite imagery. To address this, we introduce MoViX, a self-supervised cross-view video localization framework that learns viewpoint- and season-invariant representations while preserving directional awareness essential for accurate localization. MoViX employs a pose-dependent positive sampling strategy to enhance directional discrimination and temporally aligned hard negative mining to discourage shortcut learning from seasonal cues. A motion-informed frame sampler selects spatially diverse frames, and a lightweight temporal aggregator emphasizes geometrically aligned observations while downweighting ambiguous ones. At inference, MoViX runs within a Monte Carlo Localization framework, using a learned cross-view matching module in place of handcrafted models. Entropy-guided temperature scaling enables robust multi-hypothesis tracking and confident convergence under visual ambiguity. We evaluate MoViX on the TartanDrive 2.0 dataset, training on under 30 minutes of data and testing over 12.29 km. Despite outdated satellite imagery, MoViX localizes within 25 meters of ground truth 93% of the time, and within 50 meters 100% of the time in unseen regions, outperforming state-of-the-art baselines without environment-specific tuning. We further demonstrate generalization on a real-world off-road dataset from a geographically distinct site with a different robot platform.
V2X-Lead: LiDAR-based End-to-End Autonomous Driving with Vehicle-to-Everything Communication Integration
Sep 26, 2023This paper presents a LiDAR-based end-to-end autonomous driving method with Vehicle-to-Everything (V2X) communication integration, termed V2X-Lead, to address the challenges of navigating unregulated urban scenarios under mixed-autonomy traffic conditions. The proposed method aims to handle imperfect partial observations by fusing the onboard LiDAR sensor and V2X communication data. A model-free and off-policy deep reinforcement learning (DRL) algorithm is employed to train the driving agent, which incorporates a carefully designed reward function and multi-task learning technique to enhance generalization across diverse driving tasks and scenarios. Experimental results demonstrate the effectiveness of the proposed approach in improving safety and efficiency in the task of traversing unsignalized intersections in mixed-autonomy traffic, and its generalizability to previously unseen scenarios, such as roundabouts. The integration of V2X communication offers a significant data source for autonomous vehicles (AVs) to perceive their surroundings beyond onboard sensors, resulting in a more accurate and comprehensive perception of the driving environment and more safe and robust driving behavior.
A Systematic Survey of Control Techniques and Applications: From Autonomous Vehicles to Connected and Automated Vehicles
Mar 10, 2023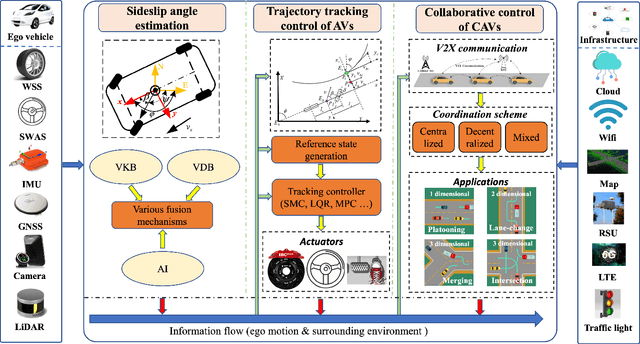
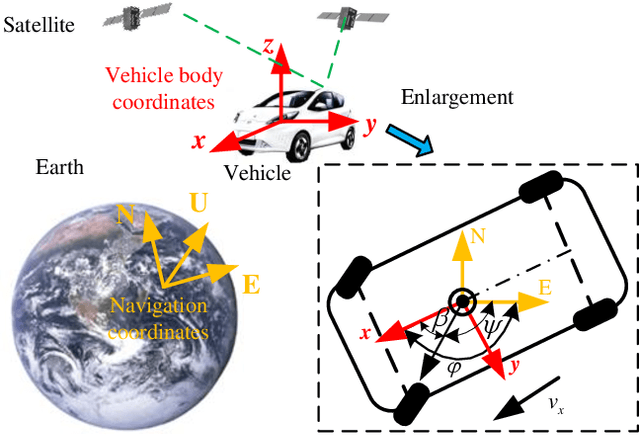
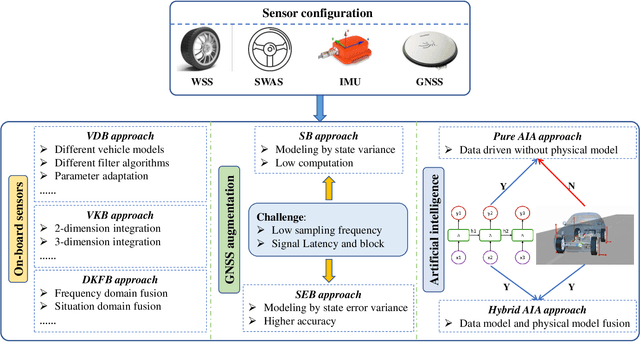
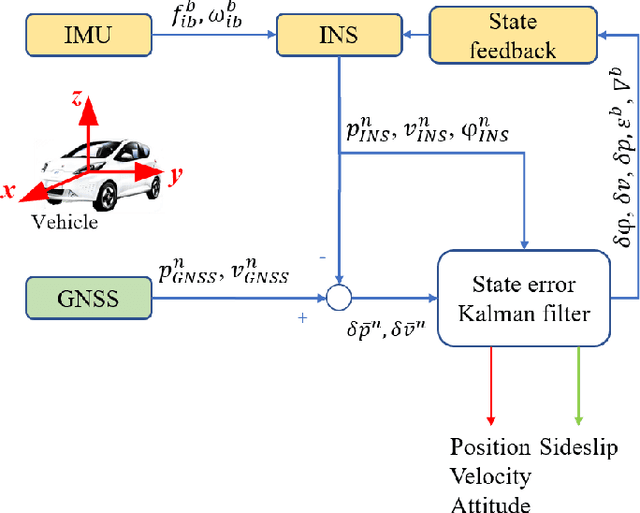
Vehicle control is one of the most critical challenges in autonomous vehicles (AVs) and connected and automated vehicles (CAVs), and it is paramount in vehicle safety, passenger comfort, transportation efficiency, and energy saving. This survey attempts to provide a comprehensive and thorough overview of the current state of vehicle control technology, focusing on the evolution from vehicle state estimation and trajectory tracking control in AVs at the microscopic level to collaborative control in CAVs at the macroscopic level. First, this review starts with vehicle key state estimation, specifically vehicle sideslip angle, which is the most pivotal state for vehicle trajectory control, to discuss representative approaches. Then, we present symbolic vehicle trajectory tracking control approaches for AVs. On top of that, we further review the collaborative control frameworks for CAVs and corresponding applications. Finally, this survey concludes with a discussion of future research directions and the challenges. This survey aims to provide a contextualized and in-depth look at state of the art in vehicle control for AVs and CAVs, identifying critical areas of focus and pointing out the potential areas for further exploration.