 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBEV-Patch-PF: Particle Filtering with BEV-Aerial Feature Matching for Off-Road Geo-Localization
Dec 17, 2025We propose BEV-Patch-PF, a GPS-free sequential geo-localization system that integrates a particle filter with learned bird's-eye-view (BEV) and aerial feature maps. From onboard RGB and depth images, we construct a BEV feature map. For each 3-DoF particle pose hypothesis, we crop the corresponding patch from an aerial feature map computed from a local aerial image queried around the approximate location. BEV-Patch-PF computes a per-particle log-likelihood by matching the BEV feature to the aerial patch feature. On two real-world off-road datasets, our method achieves 7.5x lower absolute trajectory error (ATE) on seen routes and 7.0x lower ATE on unseen routes than a retrieval-based baseline, while maintaining accuracy under dense canopy and shadow. The system runs in real time at 10 Hz on an NVIDIA Tesla T4, enabling practical robot deployment.
Spatiotemporal Contrastive Learning for Cross-View Video Localization in Unstructured Off-road Terrains
Jun 05, 2025Robust cross-view 3-DoF localization in GPS-denied, off-road environments remains challenging due to (1) perceptual ambiguities from repetitive vegetation and unstructured terrain, and (2) seasonal shifts that significantly alter scene appearance, hindering alignment with outdated satellite imagery. To address this, we introduce MoViX, a self-supervised cross-view video localization framework that learns viewpoint- and season-invariant representations while preserving directional awareness essential for accurate localization. MoViX employs a pose-dependent positive sampling strategy to enhance directional discrimination and temporally aligned hard negative mining to discourage shortcut learning from seasonal cues. A motion-informed frame sampler selects spatially diverse frames, and a lightweight temporal aggregator emphasizes geometrically aligned observations while downweighting ambiguous ones. At inference, MoViX runs within a Monte Carlo Localization framework, using a learned cross-view matching module in place of handcrafted models. Entropy-guided temperature scaling enables robust multi-hypothesis tracking and confident convergence under visual ambiguity. We evaluate MoViX on the TartanDrive 2.0 dataset, training on under 30 minutes of data and testing over 12.29 km. Despite outdated satellite imagery, MoViX localizes within 25 meters of ground truth 93% of the time, and within 50 meters 100% of the time in unseen regions, outperforming state-of-the-art baselines without environment-specific tuning. We further demonstrate generalization on a real-world off-road dataset from a geographically distinct site with a different robot platform.
CLOVER: Context-aware Long-term Object Viewpoint- and Environment- Invariant Representation Learning
Jul 12, 2024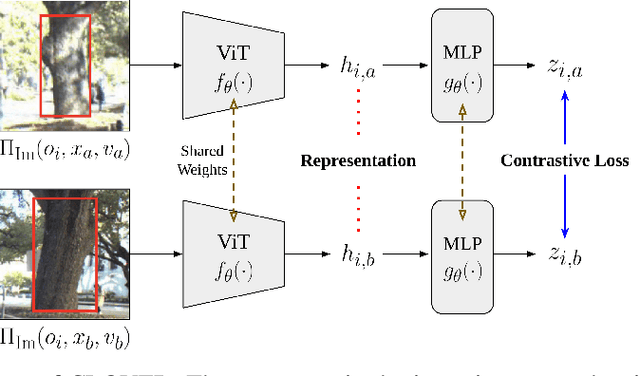
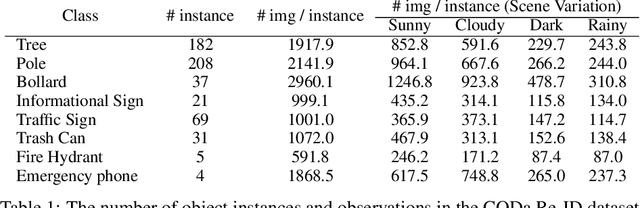
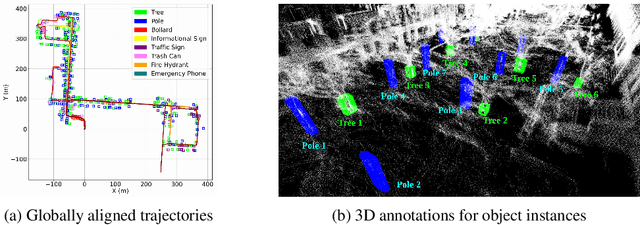
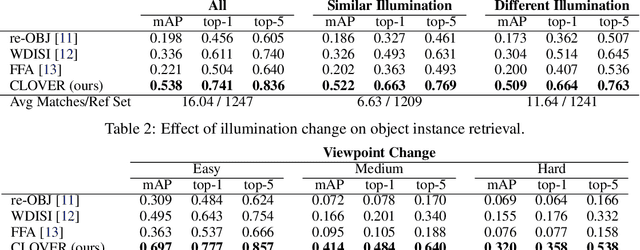
In many applications, robots can benefit from object-level understanding of their environments, including the ability to distinguish object instances and re-identify previously seen instances. Object re-identification is challenging across different viewpoints and in scenes with significant appearance variation arising from weather or lighting changes. Most works on object re-identification focus on specific classes; approaches that address general object re-identification require foreground segmentation and have limited consideration of challenges such as occlusions, outdoor scenes, and illumination changes. To address this problem, we introduce CODa Re-ID: an in-the-wild object re-identification dataset containing 1,037,814 observations of 557 objects of 8 classes under diverse lighting conditions and viewpoints. Further, we propose CLOVER, a representation learning method for object observations that can distinguish between static object instances. Our results show that CLOVER achieves superior performance in static object re-identification under varying lighting conditions and viewpoint changes, and can generalize to unseen instances and classes.
ObVi-SLAM: Long-Term Object-Visual SLAM
Sep 26, 2023



Robots responsible for tasks over long time scales must be able to localize consistently and scalably amid geometric, viewpoint, and appearance changes. Existing visual SLAM approaches rely on low-level feature descriptors that are not robust to such environmental changes and result in large map sizes that scale poorly over long-term deployments. In contrast, object detections are robust to environmental variations and lead to more compact representations, but most object-based SLAM systems target short-term indoor deployments with close objects. In this paper, we introduce ObVi-SLAM to overcome these challenges by leveraging the best of both approaches. ObVi-SLAM uses low-level visual features for high-quality short-term visual odometry; and to ensure global, long-term consistency, ObVi-SLAM builds an uncertainty-aware long-term map of persistent objects and updates it after every deployment. By evaluating ObVi-SLAM on data from 16 deployment sessions spanning different weather and lighting conditions, we empirically show that ObVi-SLAM generates accurate localization estimates consistent over long-time scales in spite of varying appearance conditions.
Probabilistic Object Maps for Long-Term Robot Localization
Oct 14, 2021


Robots deployed in settings such as warehouses and parking lots must cope with frequent and substantial changes when localizing in their environments. While many previous localization and mapping algorithms have explored methods of identifying and focusing on long-term features to handle change in such environments, we propose a different approach -- can a robot understand the distribution of movable objects and relate it to observations of such objects to reason about global localization? In this paper, we present probabilistic object maps (POMs), which represent the distributions of movable objects using pose-likelihood sample pairs derived from prior trajectories through the environment and use a Gaussian process classifier to generate the likelihood of an object at a query pose. We also introduce POM-Localization, which uses an observation model based on POMs to perform inference on a factor graph for globally consistent long-term localization. We present empirical results showing that POM-Localization is indeed effective at producing globally consistent localization estimates in challenging real-world environments, and that POM-Localization improves trajectory estimates even when the POM is formed from partially incorrect data.