 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBEV-Patch-PF: Particle Filtering with BEV-Aerial Feature Matching for Off-Road Geo-Localization
Dec 17, 2025We propose BEV-Patch-PF, a GPS-free sequential geo-localization system that integrates a particle filter with learned bird's-eye-view (BEV) and aerial feature maps. From onboard RGB and depth images, we construct a BEV feature map. For each 3-DoF particle pose hypothesis, we crop the corresponding patch from an aerial feature map computed from a local aerial image queried around the approximate location. BEV-Patch-PF computes a per-particle log-likelihood by matching the BEV feature to the aerial patch feature. On two real-world off-road datasets, our method achieves 7.5x lower absolute trajectory error (ATE) on seen routes and 7.0x lower ATE on unseen routes than a retrieval-based baseline, while maintaining accuracy under dense canopy and shadow. The system runs in real time at 10 Hz on an NVIDIA Tesla T4, enabling practical robot deployment.
Zero to Autonomy in Real-Time: Online Adaptation of Dynamics in Unstructured Environments
Sep 15, 2025Autonomous robots must go from zero prior knowledge to safe control within seconds to operate in unstructured environments. Abrupt terrain changes, such as a sudden transition to ice, create dynamics shifts that can destabilize planners unless the model adapts in real-time. We present a method for online adaptation that combines function encoders with recursive least squares, treating the function encoder coefficients as latent states updated from streaming odometry. This yields constant-time coefficient estimation without gradient-based inner-loop updates, enabling adaptation from only a few seconds of data. We evaluate our approach on a Van der Pol system to highlight algorithmic behavior, in a Unity simulator for high-fidelity off-road navigation, and on a Clearpath Jackal robot, including on a challenging terrain at a local ice rink. Across these settings, our method improves model accuracy and downstream planning, reducing collisions compared to static and meta-learning baselines.
Spatiotemporal Contrastive Learning for Cross-View Video Localization in Unstructured Off-road Terrains
Jun 05, 2025Robust cross-view 3-DoF localization in GPS-denied, off-road environments remains challenging due to (1) perceptual ambiguities from repetitive vegetation and unstructured terrain, and (2) seasonal shifts that significantly alter scene appearance, hindering alignment with outdated satellite imagery. To address this, we introduce MoViX, a self-supervised cross-view video localization framework that learns viewpoint- and season-invariant representations while preserving directional awareness essential for accurate localization. MoViX employs a pose-dependent positive sampling strategy to enhance directional discrimination and temporally aligned hard negative mining to discourage shortcut learning from seasonal cues. A motion-informed frame sampler selects spatially diverse frames, and a lightweight temporal aggregator emphasizes geometrically aligned observations while downweighting ambiguous ones. At inference, MoViX runs within a Monte Carlo Localization framework, using a learned cross-view matching module in place of handcrafted models. Entropy-guided temperature scaling enables robust multi-hypothesis tracking and confident convergence under visual ambiguity. We evaluate MoViX on the TartanDrive 2.0 dataset, training on under 30 minutes of data and testing over 12.29 km. Despite outdated satellite imagery, MoViX localizes within 25 meters of ground truth 93% of the time, and within 50 meters 100% of the time in unseen regions, outperforming state-of-the-art baselines without environment-specific tuning. We further demonstrate generalization on a real-world off-road dataset from a geographically distinct site with a different robot platform.
Safely: Safe Stochastic Motion Planning Under Constrained Sensing via Duality
Mar 05, 2022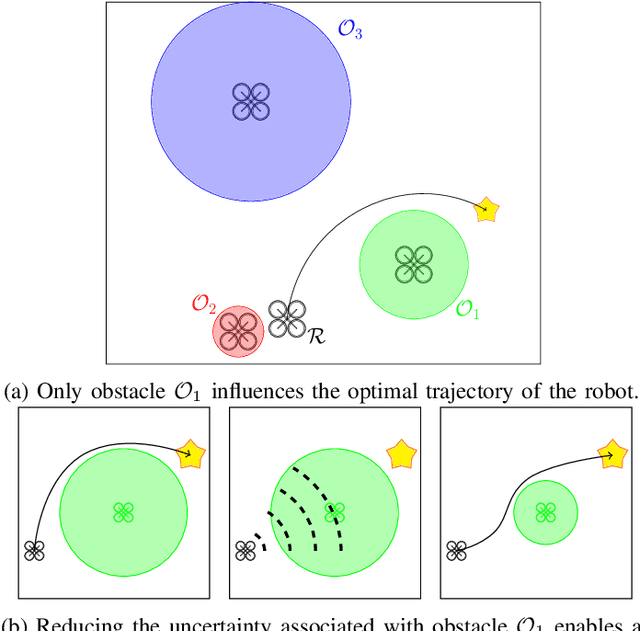
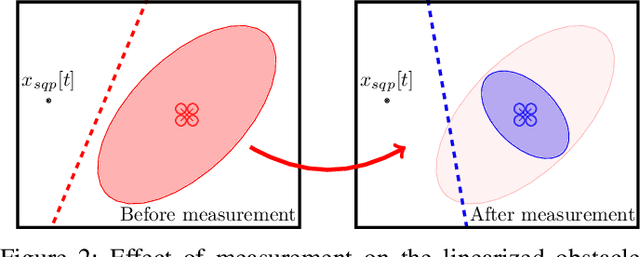
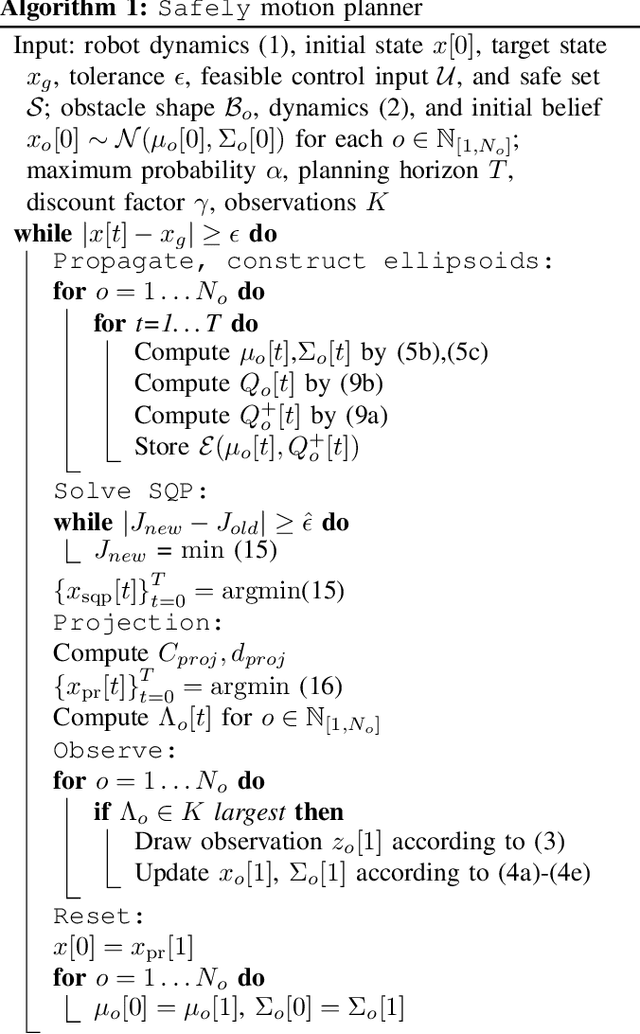
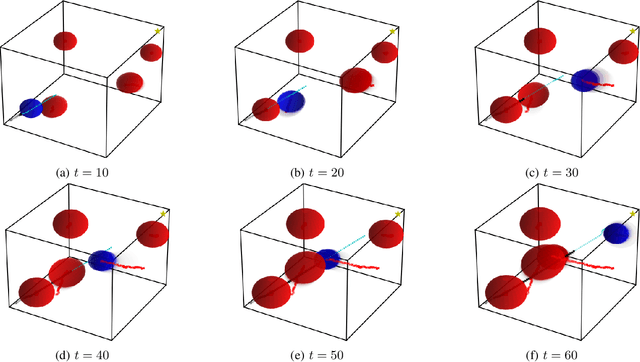
Consider a robot operating in an uncertain environment with stochastic, dynamic obstacles. Despite the clear benefits for trajectory optimization, it is often hard to keep track of each obstacle at every time step due to sensing and hardware limitations. We introduce the Safely motion planner, a receding-horizon control framework, that simultaneously synthesizes both a trajectory for the robot to follow as well as a sensor selection strategy that prescribes trajectory-relevant obstacles to measure at each time step while respecting the sensing constraints of the robot. We perform the motion planning using sequential quadratic programming, and prescribe obstacles to sense based on the duality information associated with the convex subproblems. We guarantee safety by ensuring that the probability of the robot colliding with any of the obstacles is below a prescribed threshold at every time step of the planned robot trajectory. We demonstrate the efficacy of the Safely motion planner through software and hardware experiments.