 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Alignment, Calibration, and Activation Patterns in Large Language Model Uncertainty
May 29, 2026Uncertainty Quantification is a large and growing subfield of large language model behavioral analysis. Primarily to recognize and combat hallucination, the field has largely focused on measuring and improving calibration, the accuracy of uncertainty judgments to task efficacy. In this work, we investigate the relatively underexplored question of how similar large language model uncertainty is to human uncertainty. We investigate the presence and strength of human-similar uncertainty signals, deemed uncertainty alignment, in large language model overt behavior and internal activation patterns. We identify whether the models show evidence of simultaneous alignment and calibration on a variety of datasets covering both multiple choice and open ended factual recall. And we characterize the effect of instruct fine-tuning on each of these facets.
Zero to Autonomy in Real-Time: Online Adaptation of Dynamics in Unstructured Environments
Sep 15, 2025Autonomous robots must go from zero prior knowledge to safe control within seconds to operate in unstructured environments. Abrupt terrain changes, such as a sudden transition to ice, create dynamics shifts that can destabilize planners unless the model adapts in real-time. We present a method for online adaptation that combines function encoders with recursive least squares, treating the function encoder coefficients as latent states updated from streaming odometry. This yields constant-time coefficient estimation without gradient-based inner-loop updates, enabling adaptation from only a few seconds of data. We evaluate our approach on a Van der Pol system to highlight algorithmic behavior, in a Unity simulator for high-fidelity off-road navigation, and on a Clearpath Jackal robot, including on a challenging terrain at a local ice rink. Across these settings, our method improves model accuracy and downstream planning, reducing collisions compared to static and meta-learning baselines.
Online Adaptation of Terrain-Aware Dynamics for Planning in Unstructured Environments
Jun 04, 2025Autonomous mobile robots operating in remote, unstructured environments must adapt to new, unpredictable terrains that can change rapidly during operation. In such scenarios, a critical challenge becomes estimating the robot's dynamics on changing terrain in order to enable reliable, accurate navigation and planning. We present a novel online adaptation approach for terrain-aware dynamics modeling and planning using function encoders. Our approach efficiently adapts to new terrains at runtime using limited online data without retraining or fine-tuning. By learning a set of neural network basis functions that span the robot dynamics on diverse terrains, we enable rapid online adaptation to new, unseen terrains and environments as a simple least-squares calculation. We demonstrate our approach for terrain adaptation in a Unity-based robotics simulator and show that the downstream controller has better empirical performance due to higher accuracy of the learned model. This leads to fewer collisions with obstacles while navigating in cluttered environments as compared to a neural ODE baseline.
Joint Verification and Refinement of Language Models for Safety-Constrained Planning
Oct 18, 2024Although pre-trained language models can generate executable plans (e.g., programmatic policies) for solving robot tasks, the generated plans may violate task-relevant logical specifications due to the models' black-box nature. A significant gap remains between the language models' outputs and verifiable executions of plans. We develop a method to generate executable plans and formally verify them against task-relevant safety specifications. Given a high-level task description in natural language, the proposed method queries a language model to generate plans in the form of executable robot programs. It then converts the generated plan into an automaton-based representation, allowing formal verification of the automaton against the specifications. We prove that given a set of verified plans, the composition of these plans also satisfies the safety specifications. This proof ensures the safety of complex, multi-component plans, obviating the computation complexity of verifying the composed plan. We then propose an automated fine-tuning process that refines the language model to generate specification-compliant plans without the need for human labeling. The empirical results show a 30 percent improvement in the probability of generating plans that meet task specifications after fine-tuning.
Fine-Tuning Language Models Using Formal Methods Feedback
Oct 27, 2023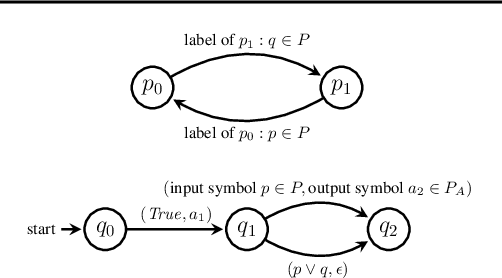
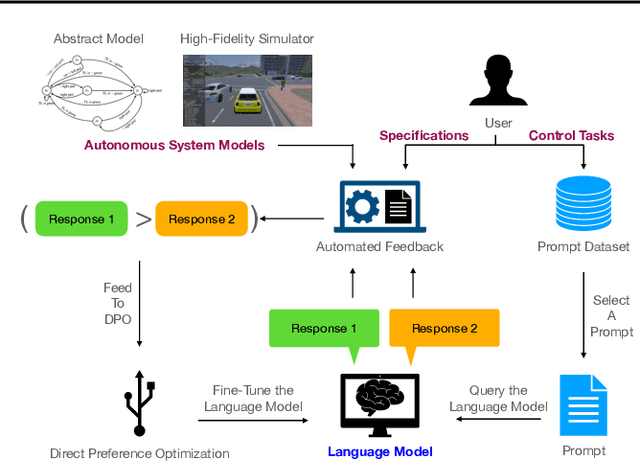

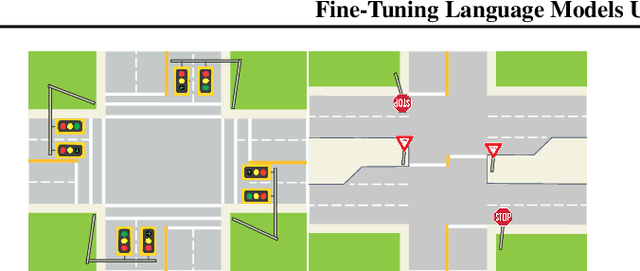
Although pre-trained language models encode generic knowledge beneficial for planning and control, they may fail to generate appropriate control policies for domain-specific tasks. Existing fine-tuning methods use human feedback to address this limitation, however, sourcing human feedback is labor intensive and costly. We present a fully automated approach to fine-tune pre-trained language models for applications in autonomous systems, bridging the gap between generic knowledge and domain-specific requirements while reducing cost. The method synthesizes automaton-based controllers from pre-trained models guided by natural language task descriptions. These controllers are verifiable against independently provided specifications within a world model, which can be abstract or obtained from a high-fidelity simulator. Controllers with high compliance with the desired specifications receive higher ranks, guiding the iterative fine-tuning process. We provide quantitative evidences, primarily in autonomous driving, to demonstrate the method's effectiveness across multiple tasks. The results indicate an improvement in percentage of specifications satisfied by the controller from 60% to 90%.