 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRandomized Greedy Methods for Weak Submodular Sensor Selection with Robustness Considerations
Apr 04, 2024



We study a pair of budget- and performance-constrained weak submodular maximization problems. For computational efficiency, we explore the use of stochastic greedy algorithms which limit the search space via random sampling instead of the standard greedy procedure which explores the entire feasible search space. We propose a pair of stochastic greedy algorithms, namely, Modified Randomized Greedy (MRG) and Dual Randomized Greedy (DRG) to approximately solve the budget- and performance-constrained problems, respectively. For both algorithms, we derive approximation guarantees that hold with high probability. We then examine the use of DRG in robust optimization problems wherein the objective is to maximize the worst-case of a number of weak submodular objectives and propose the Randomized Weak Submodular Saturation Algorithm (Random-WSSA). We further derive a high-probability guarantee for when Random-WSSA successfully constructs a robust solution. Finally, we showcase the effectiveness of these algorithms in a variety of relevant uses within the context of Earth-observing LEO constellations which estimate atmospheric weather conditions and provide Earth coverage.
Safely: Safe Stochastic Motion Planning Under Constrained Sensing via Duality
Mar 05, 2022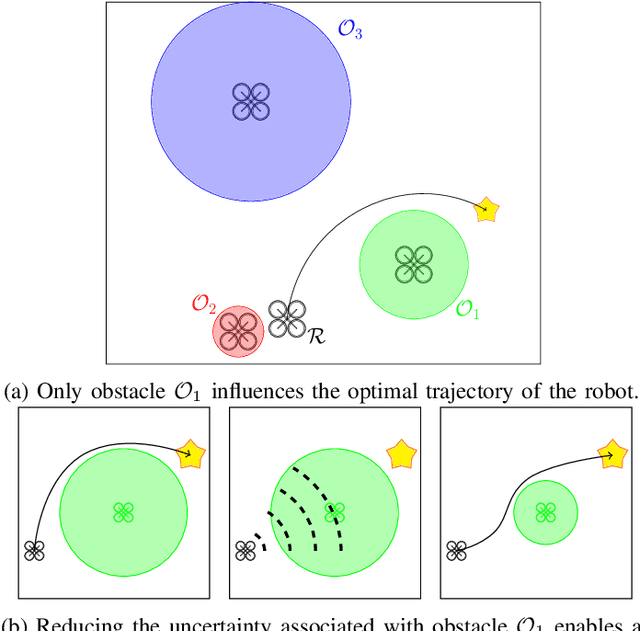
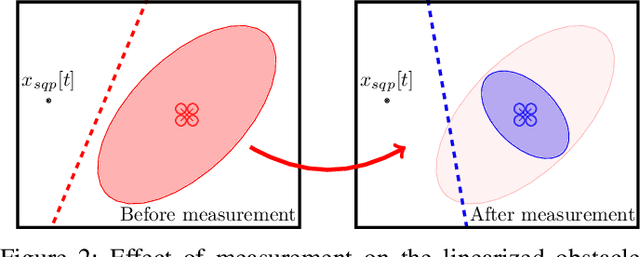
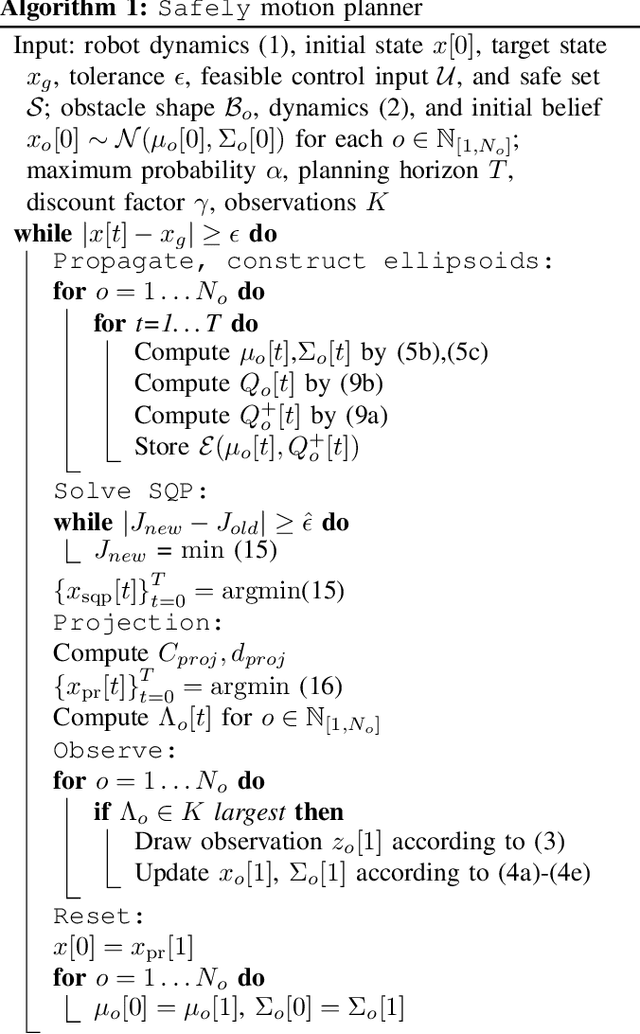
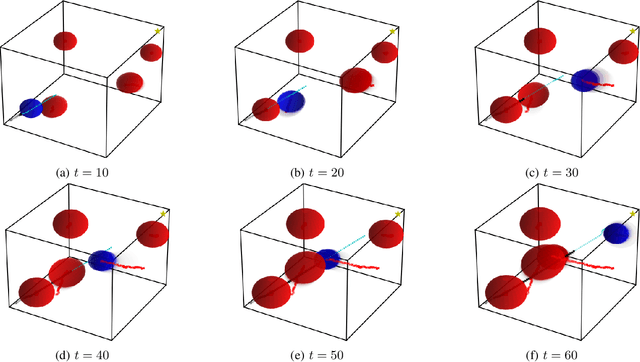
Consider a robot operating in an uncertain environment with stochastic, dynamic obstacles. Despite the clear benefits for trajectory optimization, it is often hard to keep track of each obstacle at every time step due to sensing and hardware limitations. We introduce the Safely motion planner, a receding-horizon control framework, that simultaneously synthesizes both a trajectory for the robot to follow as well as a sensor selection strategy that prescribes trajectory-relevant obstacles to measure at each time step while respecting the sensing constraints of the robot. We perform the motion planning using sequential quadratic programming, and prescribe obstacles to sense based on the duality information associated with the convex subproblems. We guarantee safety by ensuring that the probability of the robot colliding with any of the obstacles is below a prescribed threshold at every time step of the planned robot trajectory. We demonstrate the efficacy of the Safely motion planner through software and hardware experiments.
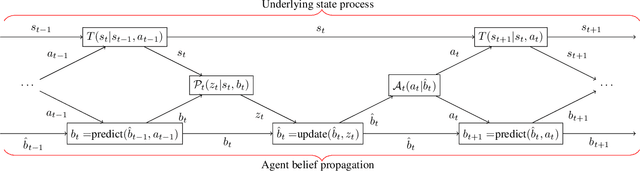
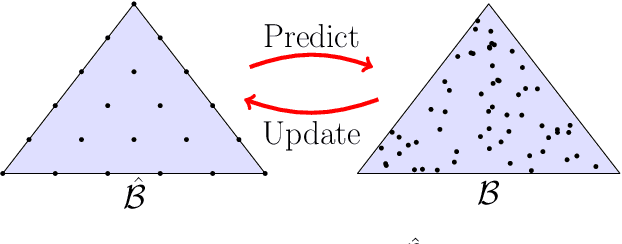
Simultaneous Perception-Action Design via Invariant Finite Belief Sets
Sep 10, 2021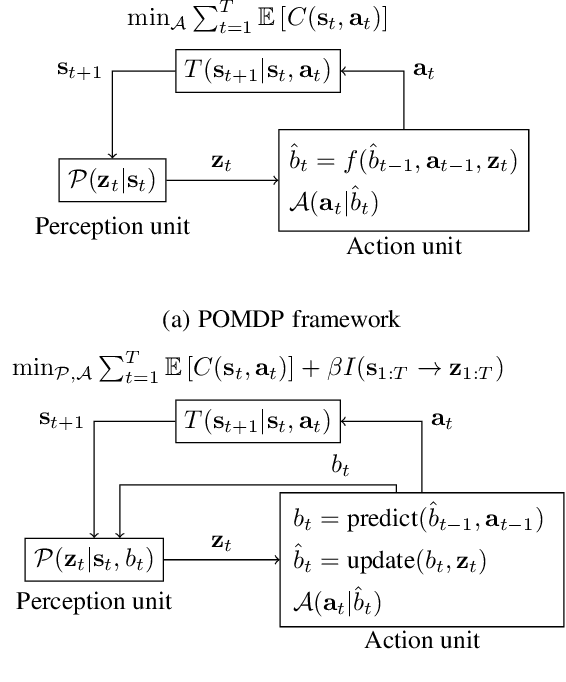

Although perception is an increasingly dominant portion of the overall computational cost for autonomous systems, only a fraction of the information perceived is likely to be relevant to the current task. To alleviate these perception costs, we develop a novel simultaneous perception-action design framework wherein an agent senses only the task-relevant information. This formulation differs from that of a partially observable Markov decision process, since the agent is free to synthesize not only its policy for action selection but also its belief-dependent observation function. The method enables the agent to balance its perception costs with those incurred by operating in its environment. To obtain a computationally tractable solution, we approximate the value function using a novel method of invariant finite belief sets, wherein the agent acts exclusively on a finite subset of the continuous belief space. We solve the approximate problem through value iteration in which a linear program is solved individually for each belief state in the set, in each iteration. Finally, we prove that the value functions, under an assumption on their structure, converge to their continuous state-space values as the sample density increases.