 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Perception-Action Design via Invariant Finite Belief Sets
Paper and Code
Sep 10, 2021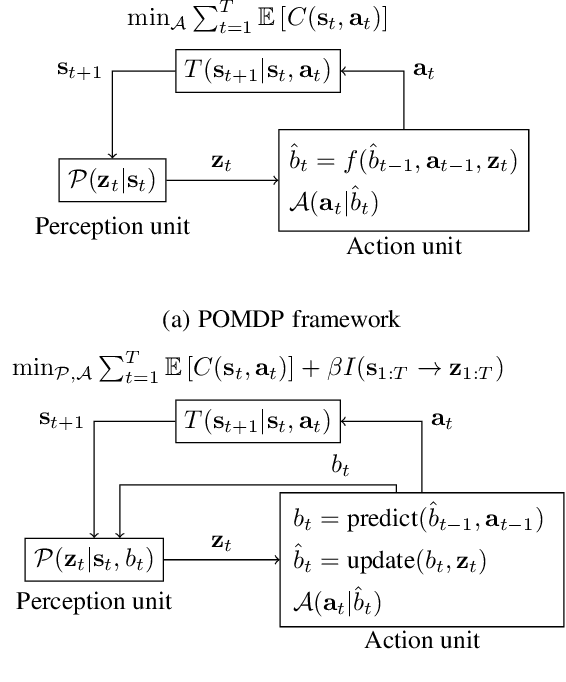
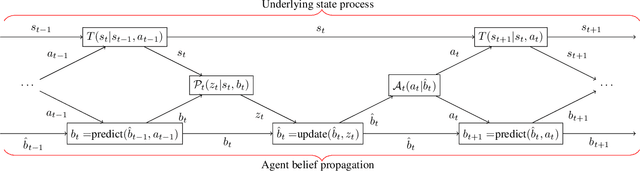
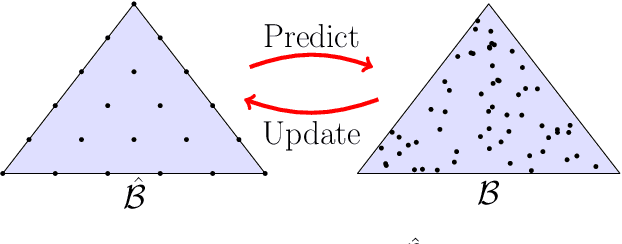

Although perception is an increasingly dominant portion of the overall computational cost for autonomous systems, only a fraction of the information perceived is likely to be relevant to the current task. To alleviate these perception costs, we develop a novel simultaneous perception-action design framework wherein an agent senses only the task-relevant information. This formulation differs from that of a partially observable Markov decision process, since the agent is free to synthesize not only its policy for action selection but also its belief-dependent observation function. The method enables the agent to balance its perception costs with those incurred by operating in its environment. To obtain a computationally tractable solution, we approximate the value function using a novel method of invariant finite belief sets, wherein the agent acts exclusively on a finite subset of the continuous belief space. We solve the approximate problem through value iteration in which a linear program is solved individually for each belief state in the set, in each iteration. Finally, we prove that the value functions, under an assumption on their structure, converge to their continuous state-space values as the sample density increases.