 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Systematic Survey of Control Techniques and Applications: From Autonomous Vehicles to Connected and Automated Vehicles
Mar 10, 2023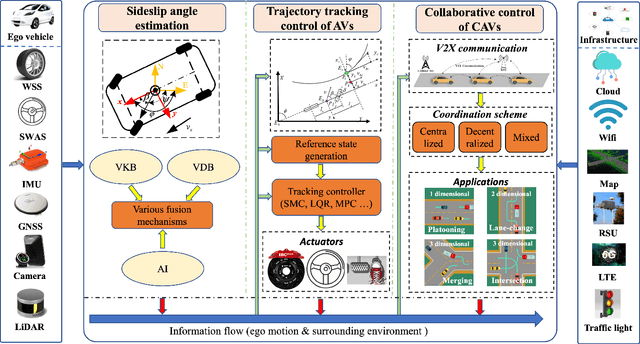
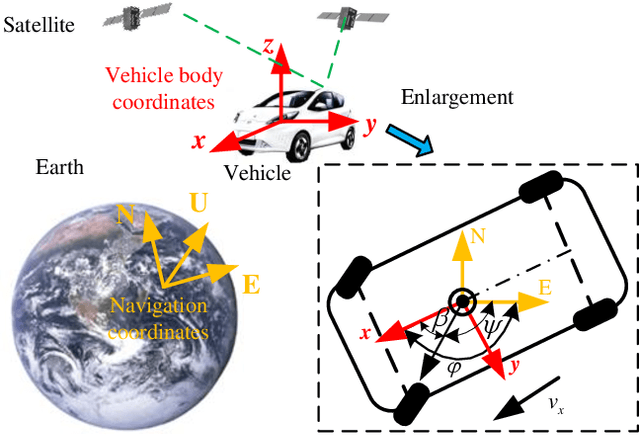
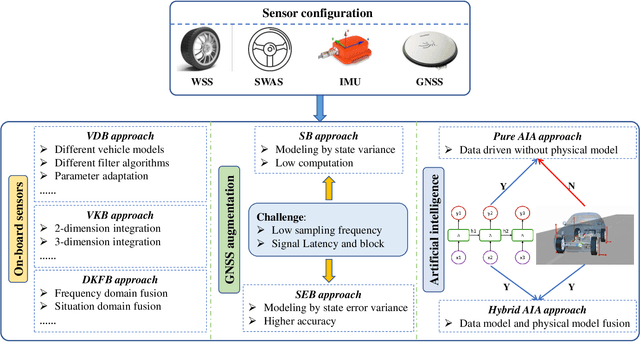
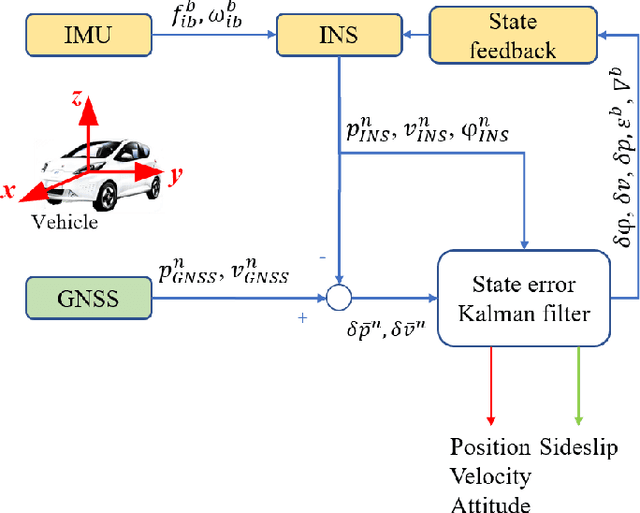
Vehicle control is one of the most critical challenges in autonomous vehicles (AVs) and connected and automated vehicles (CAVs), and it is paramount in vehicle safety, passenger comfort, transportation efficiency, and energy saving. This survey attempts to provide a comprehensive and thorough overview of the current state of vehicle control technology, focusing on the evolution from vehicle state estimation and trajectory tracking control in AVs at the microscopic level to collaborative control in CAVs at the macroscopic level. First, this review starts with vehicle key state estimation, specifically vehicle sideslip angle, which is the most pivotal state for vehicle trajectory control, to discuss representative approaches. Then, we present symbolic vehicle trajectory tracking control approaches for AVs. On top of that, we further review the collaborative control frameworks for CAVs and corresponding applications. Finally, this survey concludes with a discussion of future research directions and the challenges. This survey aims to provide a contextualized and in-depth look at state of the art in vehicle control for AVs and CAVs, identifying critical areas of focus and pointing out the potential areas for further exploration.