 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlowDrive: Energy Flow Field for End-to-End Autonomous Driving
Sep 17, 2025Recent advances in end-to-end autonomous driving leverage multi-view images to construct BEV representations for motion planning. In motion planning, autonomous vehicles need considering both hard constraints imposed by geometrically occupied obstacles (e.g., vehicles, pedestrians) and soft, rule-based semantics with no explicit geometry (e.g., lane boundaries, traffic priors). However, existing end-to-end frameworks typically rely on BEV features learned in an implicit manner, lacking explicit modeling of risk and guidance priors for safe and interpretable planning. To address this, we propose FlowDrive, a novel framework that introduces physically interpretable energy-based flow fields-including risk potential and lane attraction fields-to encode semantic priors and safety cues into the BEV space. These flow-aware features enable adaptive refinement of anchor trajectories and serve as interpretable guidance for trajectory generation. Moreover, FlowDrive decouples motion intent prediction from trajectory denoising via a conditional diffusion planner with feature-level gating, alleviating task interference and enhancing multimodal diversity. Experiments on the NAVSIM v2 benchmark demonstrate that FlowDrive achieves state-of-the-art performance with an EPDMS of 86.3, surpassing prior baselines in both safety and planning quality. The project is available at https://astrixdrive.github.io/FlowDrive.github.io/.
Structured Labeling Enables Faster Vision-Language Models for End-to-End Autonomous Driving
Jun 05, 2025Vision-Language Models (VLMs) offer a promising approach to end-to-end autonomous driving due to their human-like reasoning capabilities. However, troublesome gaps remains between current VLMs and real-world autonomous driving applications. One major limitation is that existing datasets with loosely formatted language descriptions are not machine-friendly and may introduce redundancy. Additionally, high computational cost and massive scale of VLMs hinder the inference speed and real-world deployment. To bridge the gap, this paper introduces a structured and concise benchmark dataset, NuScenes-S, which is derived from the NuScenes dataset and contains machine-friendly structured representations. Moreover, we present FastDrive, a compact VLM baseline with 0.9B parameters. In contrast to existing VLMs with over 7B parameters and unstructured language processing(e.g., LLaVA-1.5), FastDrive understands structured and concise descriptions and generates machine-friendly driving decisions with high efficiency. Extensive experiments show that FastDrive achieves competitive performance on structured dataset, with approximately 20% accuracy improvement on decision-making tasks, while surpassing massive parameter baseline in inference speed with over 10x speedup. Additionally, ablation studies further focus on the impact of scene annotations (e.g., weather, time of day) on decision-making tasks, demonstrating their importance on decision-making tasks in autonomous driving.
Predicting Driver's Perceived Risk: a Model Based on Semi-Supervised Learning Strategy
Apr 17, 2025Drivers' perception of risk determines their acceptance, trust, and use of the Automated Driving Systems (ADSs). However, perceived risk is subjective and difficult to evaluate using existing methods. To address this issue, a driver's subjective perceived risk (DSPR) model is proposed, regarding perceived risk as a dynamically triggered mechanism with anisotropy and attenuation. 20 participants are recruited for a driver-in-the-loop experiment to report their real-time subjective risk ratings (SRRs) when experiencing various automatic driving scenarios. A convolutional neural network and bidirectional long short-term memory network with temporal pattern attention (CNN-Bi-LSTM-TPA) is embedded into a semi-supervised learning strategy to predict SRRs, aiming to reduce data noise caused by subjective randomness of participants. The results illustrate that DSPR achieves the highest prediction accuracy of 87.91% in predicting SRRs, compared to three state-of-the-art risk models. The semi-supervised strategy improves accuracy by 20.12%. Besides, CNN-Bi-LSTM-TPA network presents the highest accuracy among four different LSTM structures. This study offers an effective method for assessing driver's perceived risk, providing support for the safety enhancement of ADS and driver's trust improvement.
GeneSUM: Large Language Model-based Gene Summary Extraction
Dec 24, 2024Emerging topics in biomedical research are continuously expanding, providing a wealth of information about genes and their function. This rapid proliferation of knowledge presents unprecedented opportunities for scientific discovery and formidable challenges for researchers striving to keep abreast of the latest advancements. One significant challenge is navigating the vast corpus of literature to extract vital gene-related information, a time-consuming and cumbersome task. To enhance the efficiency of this process, it is crucial to address several key challenges: (1) the overwhelming volume of literature, (2) the complexity of gene functions, and (3) the automated integration and generation. In response, we propose GeneSUM, a two-stage automated gene summary extractor utilizing a large language model (LLM). Our approach retrieves and eliminates redundancy of target gene literature and then fine-tunes the LLM to refine and streamline the summarization process. We conducted extensive experiments to validate the efficacy of our proposed framework. The results demonstrate that LLM significantly enhances the integration of gene-specific information, allowing more efficient decision-making in ongoing research.
BA-Net: Bridge Attention in Deep Neural Networks
Oct 10, 2024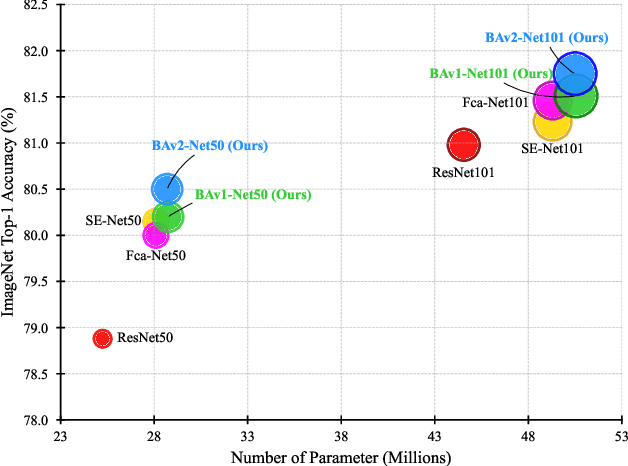
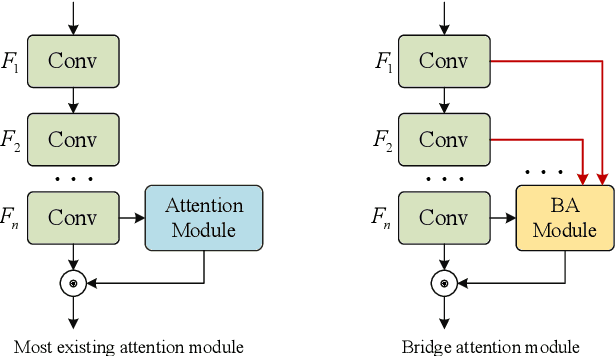
Attention mechanisms, particularly channel attention, have become highly influential in numerous computer vision tasks. Despite their effectiveness, many existing methods primarily focus on optimizing performance through complex attention modules applied at individual convolutional layers, often overlooking the synergistic interactions that can occur across multiple layers. In response to this gap, we introduce bridge attention, a novel approach designed to facilitate more effective integration and information flow between different convolutional layers. Our work extends the original bridge attention model (BAv1) by introducing an adaptive selection operator, which reduces information redundancy and optimizes the overall information exchange. This enhancement results in the development of BAv2, which achieves substantial performance improvements in the ImageNet classification task, obtaining Top-1 accuracies of 80.49% and 81.75% when using ResNet50 and ResNet101 as backbone networks, respectively. These results surpass the retrained baselines by 1.61% and 0.77%, respectively. Furthermore, BAv2 outperforms other existing channel attention techniques, such as the classical SENet101, exceeding its retrained performance by 0.52% Additionally, integrating BAv2 into advanced convolutional networks and vision transformers has led to significant gains in performance across a wide range of computer vision tasks, underscoring its broad applicability.
A Systematic Survey of Control Techniques and Applications: From Autonomous Vehicles to Connected and Automated Vehicles
Mar 10, 2023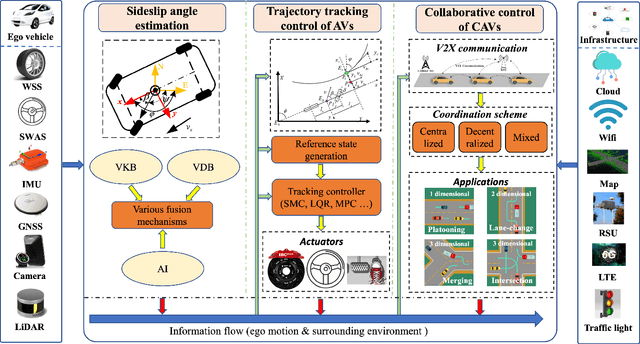
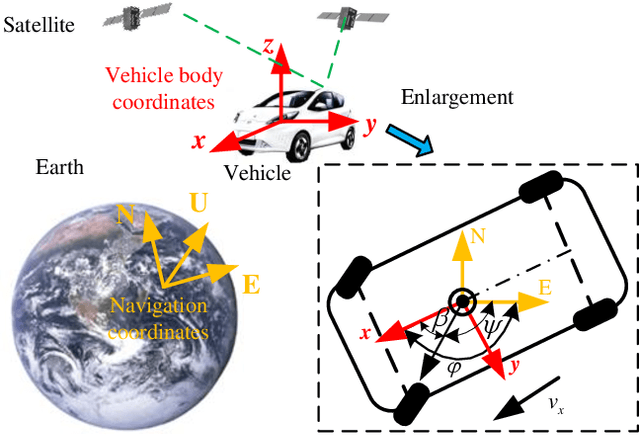
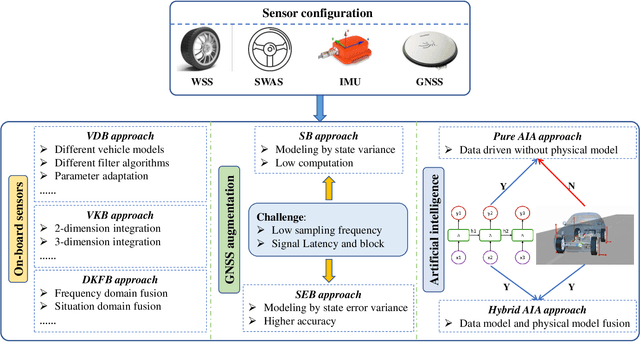
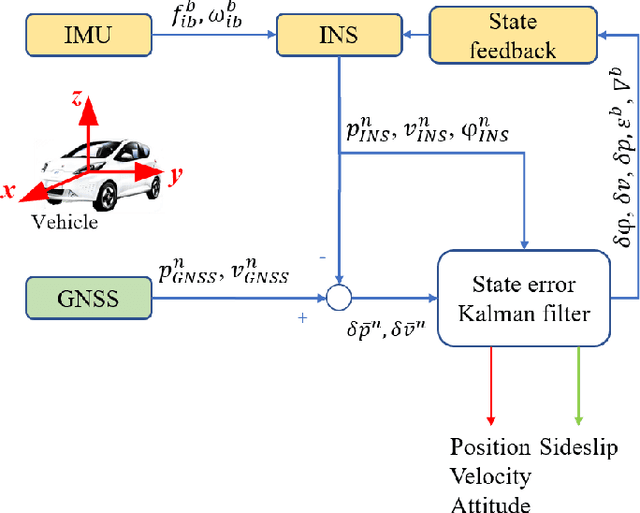
Vehicle control is one of the most critical challenges in autonomous vehicles (AVs) and connected and automated vehicles (CAVs), and it is paramount in vehicle safety, passenger comfort, transportation efficiency, and energy saving. This survey attempts to provide a comprehensive and thorough overview of the current state of vehicle control technology, focusing on the evolution from vehicle state estimation and trajectory tracking control in AVs at the microscopic level to collaborative control in CAVs at the macroscopic level. First, this review starts with vehicle key state estimation, specifically vehicle sideslip angle, which is the most pivotal state for vehicle trajectory control, to discuss representative approaches. Then, we present symbolic vehicle trajectory tracking control approaches for AVs. On top of that, we further review the collaborative control frameworks for CAVs and corresponding applications. Finally, this survey concludes with a discussion of future research directions and the challenges. This survey aims to provide a contextualized and in-depth look at state of the art in vehicle control for AVs and CAVs, identifying critical areas of focus and pointing out the potential areas for further exploration.
Open Domain Web Keyphrase Extraction Beyond Language Modeling
Nov 06, 2019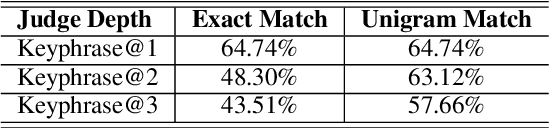
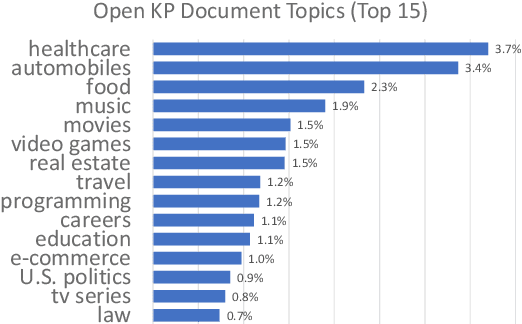
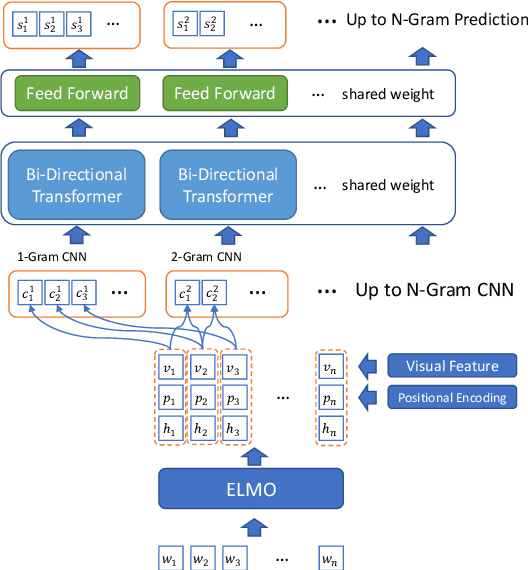
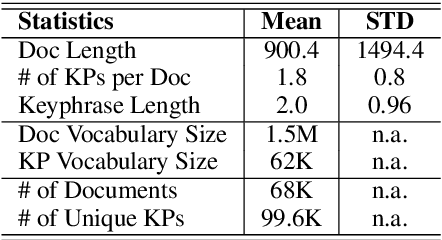
This paper studies keyphrase extraction in real-world scenarios where documents are from diverse domains and have variant content quality. We curate and release OpenKP, a large scale open domain keyphrase extraction dataset with near one hundred thousand web documents and expert keyphrase annotations. To handle the variations of domain and content quality, we develop BLING-KPE, a neural keyphrase extraction model that goes beyond language understanding using visual presentations of documents and weak supervision from search queries. Experimental results on OpenKP confirm the effectiveness of BLING-KPE and the contributions of its neural architecture, visual features, and search log weak supervision. Zero-shot evaluations on DUC-2001 demonstrate the improved generalization ability of learning from the open domain data compared to a specific domain.