 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA novel learning-based robust model predictive control energy management strategy for fuel cell electric vehicles
Paper and Code
Sep 12, 2022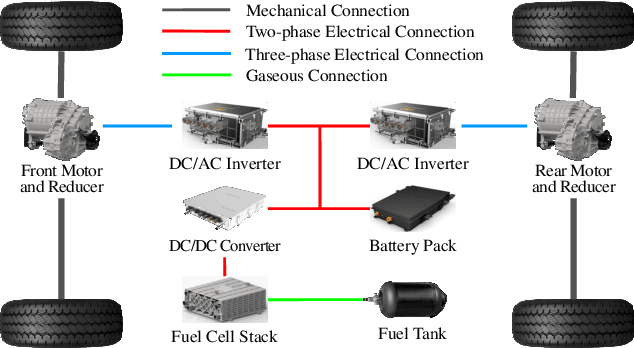
The multi-source electromechanical coupling makes the energy management of fuel cell electric vehicles (FCEVs) relatively nonlinear and complex especially in the types of 4-wheel-drive (4WD) FCEVs. Accurate state observing for complicated nonlinear system is the basis for fantastic energy managing in FCEVs. Aiming at releasing the energy-saving potential of FCEVs, a novel learning-based robust model predictive control (LRMPC) strategy is proposed for a 4WD FCEV, contributing to suitable power distribution among multiple energy sources. The well-designed strategy based on machine learning (ML) translates the knowledge of the nonlinear system to the explicit controlling scheme with superior robust performance. To start with, ML methods with high regression accuracy and superior generalization ability are trained offline to establish the precise state observer for SOC. Then, explicit data tables for SOC generated by state observer are used for grabbing accurate state changing, whose input features include the vehicle status and the states of vehicle components. To be specific, the vehicle velocity estimation for providing future speed reference is constructed by deep forest. Next, the components including explicit data tables and vehicle velocity estimation are combined with model predictive control (MPC) to release the state-of-the-art energy-saving ability for the multi-freedom system in FCEVs, whose name is LRMPC. At last, the detailed assessment is performed in simulation test to validate the advancing performance of LRMPC. The corresponding results highlight the optimal control effect in energy-saving potential and strong real-time application ability of LRMPC.