 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoulX-FlashHead: Oracle-guided Generation of Infinite Real-time Streaming Talking Heads
Feb 07, 2026Achieving a balance between high-fidelity visual quality and low-latency streaming remains a formidable challenge in audio-driven portrait generation. Existing large-scale models often suffer from prohibitive computational costs, while lightweight alternatives typically compromise on holistic facial representations and temporal stability. In this paper, we propose SoulX-FlashHead, a unified 1.3B-parameter framework designed for real-time, infinite-length, and high-fidelity streaming video generation. To address the instability of audio features in streaming scenarios, we introduce Streaming-Aware Spatiotemporal Pre-training equipped with a Temporal Audio Context Cache mechanism, which ensures robust feature extraction from short audio fragments. Furthermore, to mitigate the error accumulation and identity drift inherent in long-sequence autoregressive generation, we propose Oracle-Guided Bidirectional Distillation, leveraging ground-truth motion priors to provide precise physical guidance. We also present VividHead, a large-scale, high-quality dataset containing 782 hours of strictly aligned footage to support robust training. Extensive experiments demonstrate that SoulX-FlashHead achieves state-of-the-art performance on HDTF and VFHQ benchmarks. Notably, our Lite variant achieves an inference speed of 96 FPS on a single NVIDIA RTX 4090, facilitating ultra-fast interaction without sacrificing visual coherence.
CogMem: A Cognitive Memory Architecture for Sustained Multi-Turn Reasoning in Large Language Models
Dec 16, 2025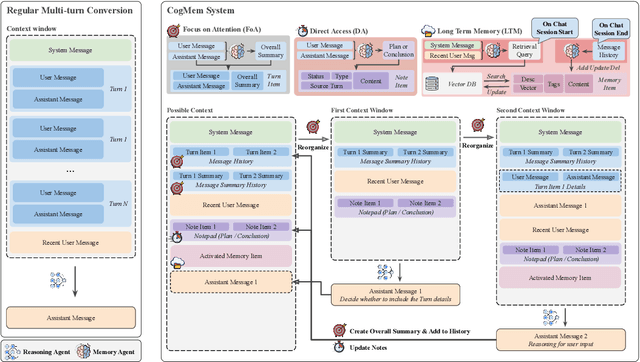
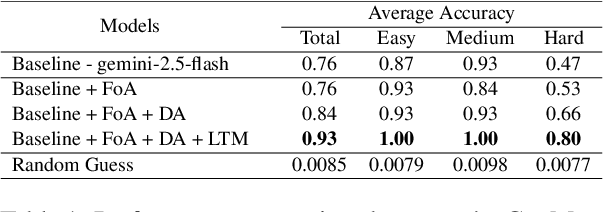
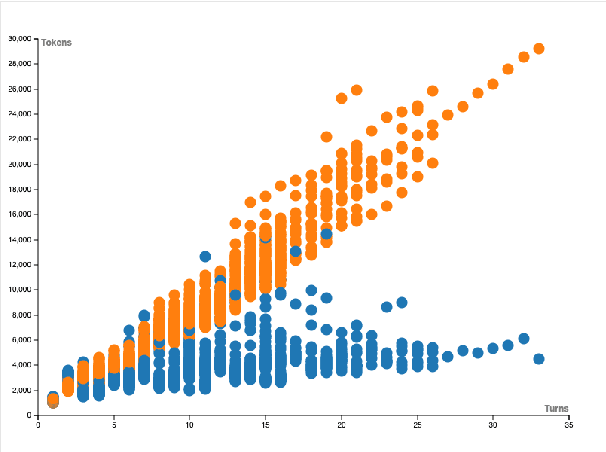
Large language models (LLMs) excel at single-turn reasoning but often lose accuracy and coherence over extended, multi-turn interactions. Recent evaluations such as TurnBench highlight recurring failure modes-reasoning bias, task drift, hallucination, overconfidence, and memory decay. Current approaches typically append full conversational histories, causing unbounded context growth, higher computational costs, and degraded reasoning efficiency. We introduce CogMem, a cognitively inspired, memory-augmented LLM architecture that supports sustained iterative reasoning through structured, persistent memory. CogMem incorporates three layers: a Long-Term Memory (LTM) that consolidates cross-session reasoning strategies; a Direct Access (DA) memory that maintains session-level notes and retrieves relevant long-term memories; and a Focus of Attention (FoA) mechanism that dynamically reconstructs concise, task-relevant context at each turn. Experiments on TurnBench show that this layered design mitigates reasoning failures, controls context growth, and improves consistency across extended reasoning chains, moving toward more reliable, human-like reasoning in LLMs.
Thor: Towards Human-Level Whole-Body Reactions for Intense Contact-Rich Environments
Oct 30, 2025



Humanoids hold great potential for service, industrial, and rescue applications, in which robots must sustain whole-body stability while performing intense, contact-rich interactions with the environment. However, enabling humanoids to generate human-like, adaptive responses under such conditions remains a major challenge. To address this, we propose Thor, a humanoid framework for human-level whole-body reactions in contact-rich environments. Based on the robot's force analysis, we design a force-adaptive torso-tilt (FAT2) reward function to encourage humanoids to exhibit human-like responses during force-interaction tasks. To mitigate the high-dimensional challenges of humanoid control, Thor introduces a reinforcement learning architecture that decouples the upper body, waist, and lower body. Each component shares global observations of the whole body and jointly updates its parameters. Finally, we deploy Thor on the Unitree G1, and it substantially outperforms baselines in force-interaction tasks. Specifically, the robot achieves a peak pulling force of 167.7 N (approximately 48% of the G1's body weight) when moving backward and 145.5 N when moving forward, representing improvements of 68.9% and 74.7%, respectively, compared with the best-performing baseline. Moreover, Thor is capable of pulling a loaded rack (130 N) and opening a fire door with one hand (60 N). These results highlight Thor's effectiveness in enhancing humanoid force-interaction capabilities.
Empirical Analysis of AI-based Energy Management in Electric Vehicles: A Case Study on Reinforcement Learning
Dec 18, 2022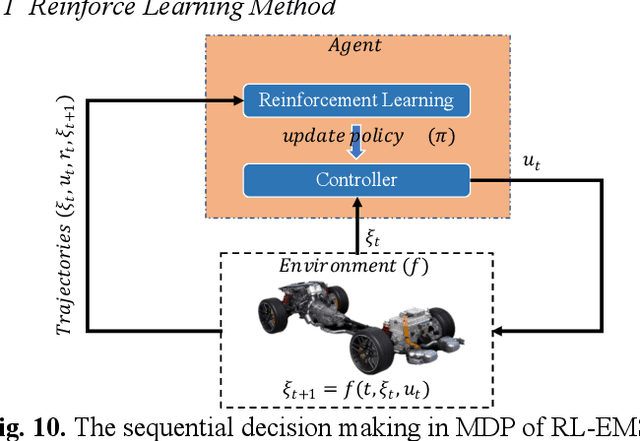
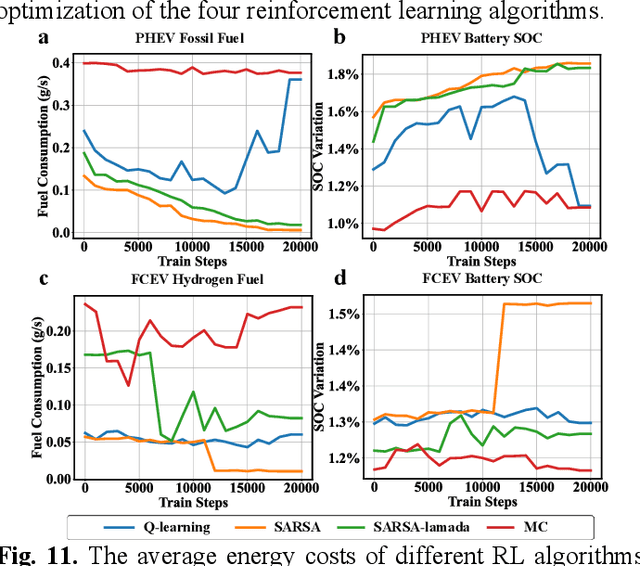
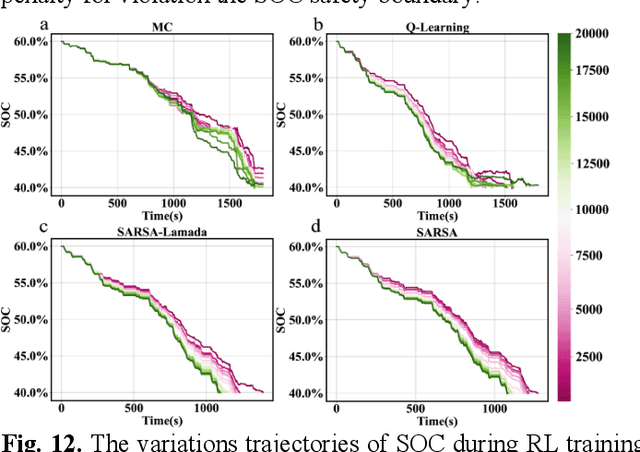
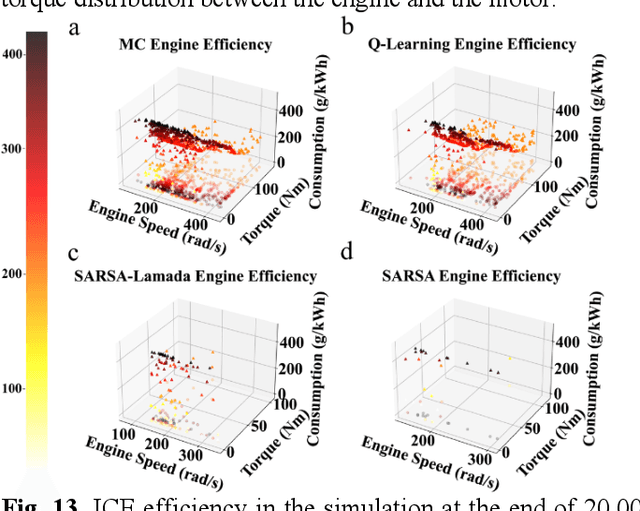
Reinforcement learning-based (RL-based) energy management strategy (EMS) is considered a promising solution for the energy management of electric vehicles with multiple power sources. It has been shown to outperform conventional methods in energy management problems regarding energy-saving and real-time performance. However, previous studies have not systematically examined the essential elements of RL-based EMS. This paper presents an empirical analysis of RL-based EMS in a Plug-in Hybrid Electric Vehicle (PHEV) and Fuel Cell Electric Vehicle (FCEV). The empirical analysis is developed in four aspects: algorithm, perception and decision granularity, hyperparameters, and reward function. The results show that the Off-policy algorithm effectively develops a more fuel-efficient solution within the complete driving cycle compared with other algorithms. Improving the perception and decision granularity does not produce a more desirable energy-saving solution but better balances battery power and fuel consumption. The equivalent energy optimization objective based on the instantaneous state of charge (SOC) variation is parameter sensitive and can help RL-EMSs to achieve more efficient energy-cost strategies.
Progress and summary of reinforcement learning on energy management of MPS-EV
Nov 08, 2022The high emission and low energy efficiency caused by internal combustion engines (ICE) have become unacceptable under environmental regulations and the energy crisis. As a promising alternative solution, multi-power source electric vehicles (MPS-EVs) introduce different clean energy systems to improve powertrain efficiency. The energy management strategy (EMS) is a critical technology for MPS-EVs to maximize efficiency, fuel economy, and range. Reinforcement learning (RL) has become an effective methodology for the development of EMS. RL has received continuous attention and research, but there is still a lack of systematic analysis of the design elements of RL-based EMS. To this end, this paper presents an in-depth analysis of the current research on RL-based EMS (RL-EMS) and summarizes the design elements of RL-based EMS. This paper first summarizes the previous applications of RL in EMS from five aspects: algorithm, perception scheme, decision scheme, reward function, and innovative training method. The contribution of advanced algorithms to the training effect is shown, the perception and control schemes in the literature are analyzed in detail, different reward function settings are classified, and innovative training methods with their roles are elaborated. Finally, by comparing the development routes of RL and RL-EMS, this paper identifies the gap between advanced RL solutions and existing RL-EMS. Finally, this paper suggests potential development directions for implementing advanced artificial intelligence (AI) solutions in EMS.
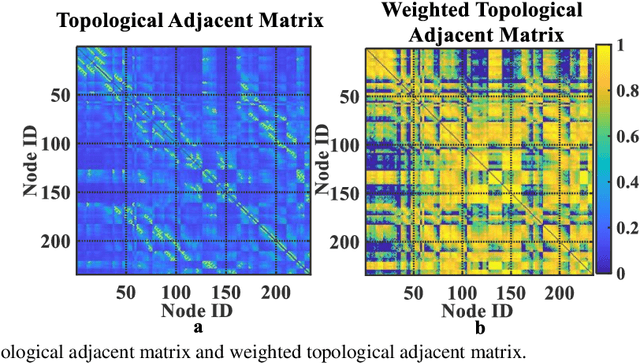
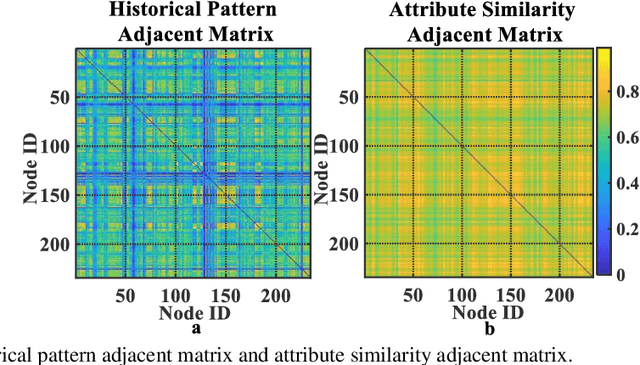
Hierarchical Graph Pooling is an Effective Citywide Traffic Condition Prediction Model
Sep 08, 2022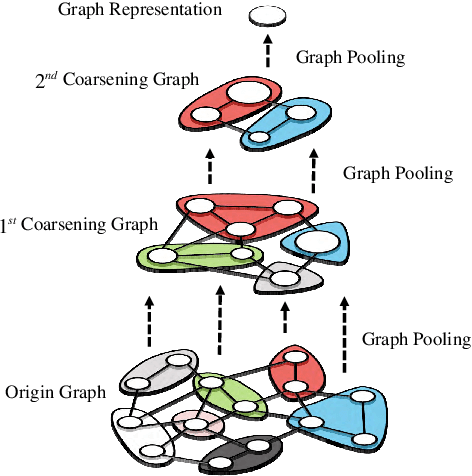
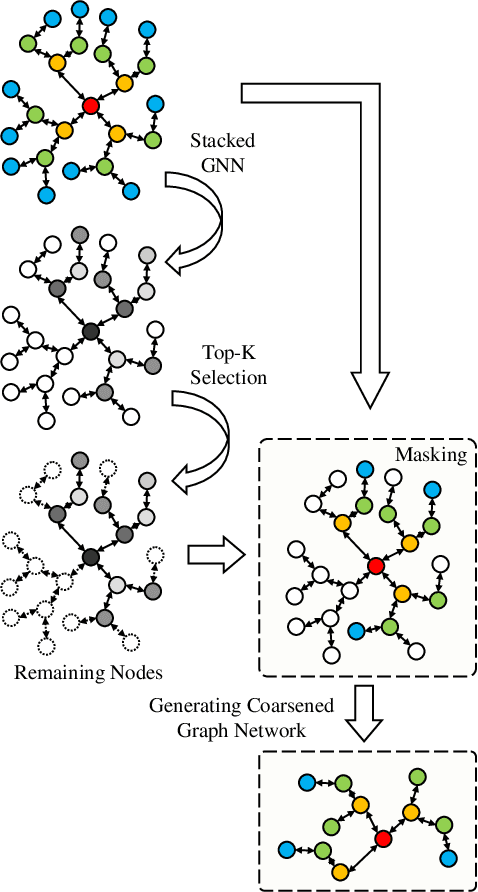
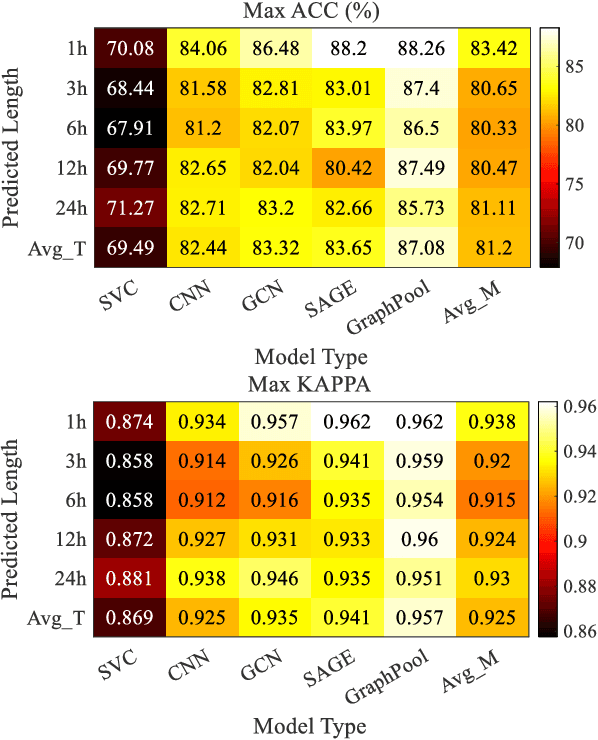
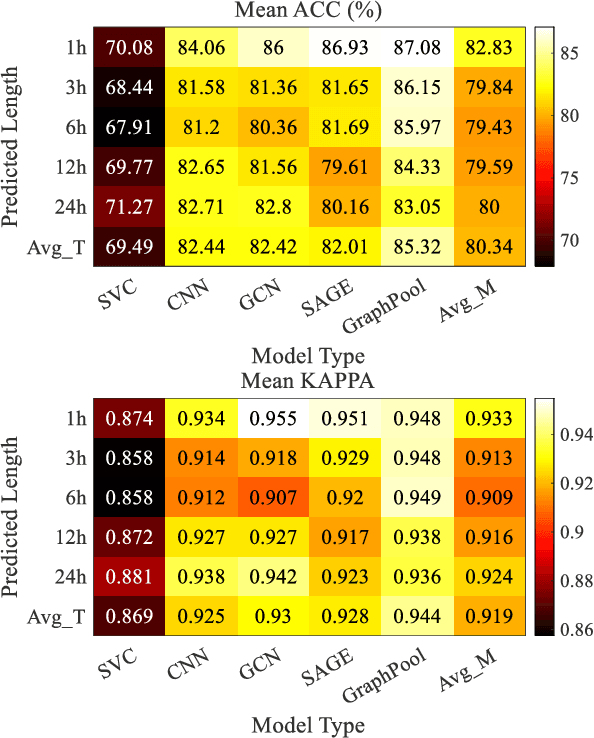
Accurate traffic conditions prediction provides a solid foundation for vehicle-environment coordination and traffic control tasks. Because of the complexity of road network data in spatial distribution and the diversity of deep learning methods, it becomes challenging to effectively define traffic data and adequately capture the complex spatial nonlinear features in the data. This paper applies two hierarchical graph pooling approaches to the traffic prediction task to reduce graph information redundancy. First, this paper verifies the effectiveness of hierarchical graph pooling methods in traffic prediction tasks. The hierarchical graph pooling methods are contrasted with the other baselines on predictive performance. Second, two mainstream hierarchical graph pooling methods, node clustering pooling and node drop pooling, are applied to analyze advantages and weaknesses in traffic prediction. Finally, for the mentioned graph neural networks, this paper compares the predictive effects of different graph network inputs on traffic prediction accuracy. The efficient ways of defining graph networks are analyzed and summarized.
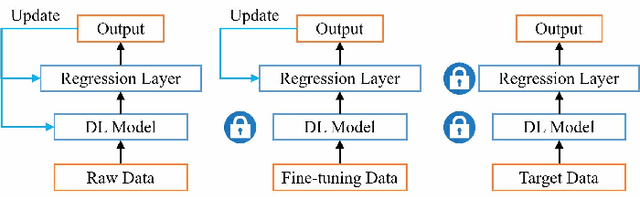
Transfer Learning and Vision Transformer based State-of-Health prediction of Lithium-Ion Batteries
Sep 07, 2022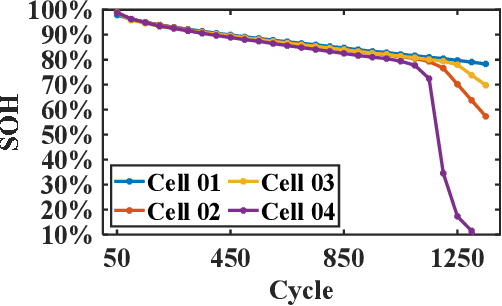
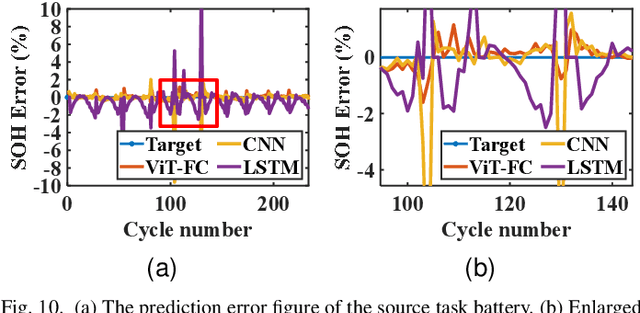
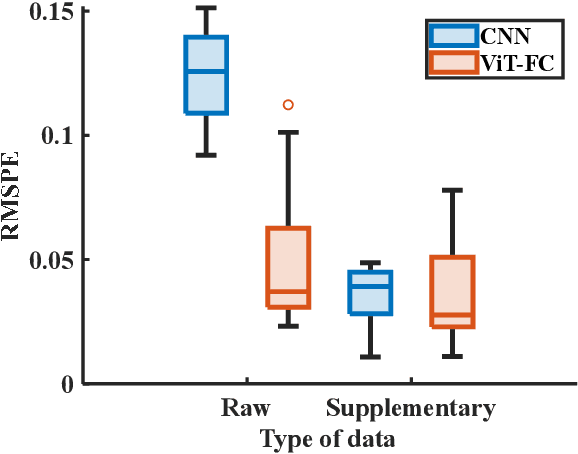
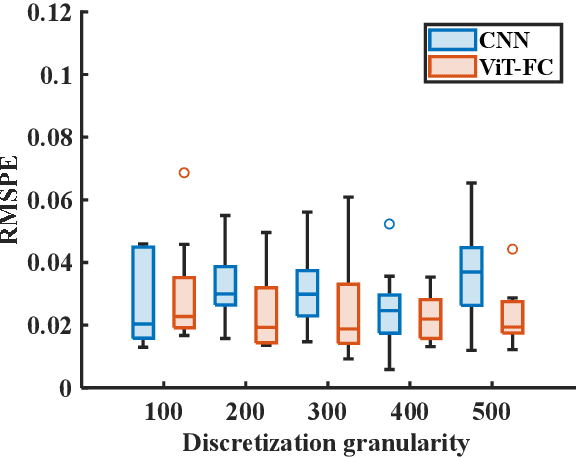
In recent years, significant progress has been made in transportation electrification. And lithium-ion batteries (LIB), as the main energy storage devices, have received widespread attention. Accurately predicting the state of health (SOH) can not only ease the anxiety of users about the battery life but also provide important information for the management of the battery. This paper presents a prediction method for SOH based on Vision Transformer (ViT) model. First, discrete charging data of a predefined voltage range is used as an input data matrix. Then, the cycle features of the battery are captured by the ViT which can obtain the global features, and the SOH is obtained by combining the cycle features with the full connection (FC) layer. At the same time, transfer learning (TL) is introduced, and the prediction model based on source task battery training is further fine-tuned according to the early cycle data of the target task battery to provide an accurate prediction. Experiments show that our method can obtain better feature expression compared with existing deep learning methods so that better prediction effect and transfer effect can be achieved.
Spatial-Temporal Feature Extraction and Evaluation Network for Citywide Traffic Condition Prediction
Jul 22, 2022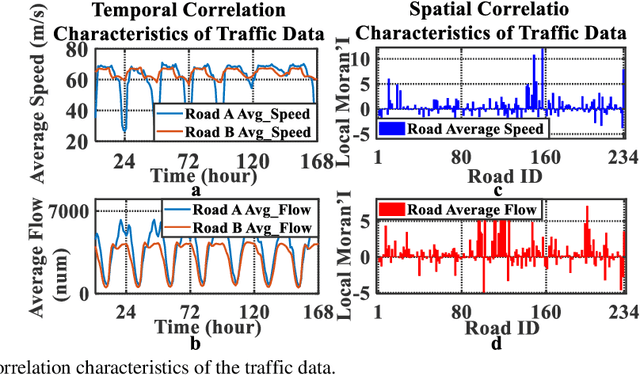
Traffic prediction plays an important role in the realization of traffic control and scheduling tasks in intelligent transportation systems. With the diversification of data sources, reasonably using rich traffic data to model the complex spatial-temporal dependence and nonlinear characteristics in traffic flow are the key challenge for intelligent transportation system. In addition, clearly evaluating the importance of spatial-temporal features extracted from different data becomes a challenge. A Double Layer - Spatial Temporal Feature Extraction and Evaluation (DL-STFEE) model is proposed. The lower layer of DL-STFEE is spatial-temporal feature extraction layer. The spatial and temporal features in traffic data are extracted by multi-graph graph convolution and attention mechanism, and different combinations of spatial and temporal features are generated. The upper layer of DL-STFEE is the spatial-temporal feature evaluation layer. Through the attention score matrix generated by the high-dimensional self-attention mechanism, the spatial-temporal features combinations are fused and evaluated, so as to get the impact of different combinations on prediction effect. Three sets of experiments are performed on actual traffic datasets to show that DL-STFEE can effectively capture the spatial-temporal features and evaluate the importance of different spatial-temporal feature combinations.
A Transferable Intersection Reconstruction Network for Traffic Speed Prediction
Jul 22, 2022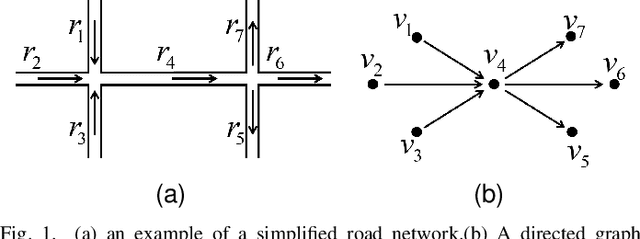
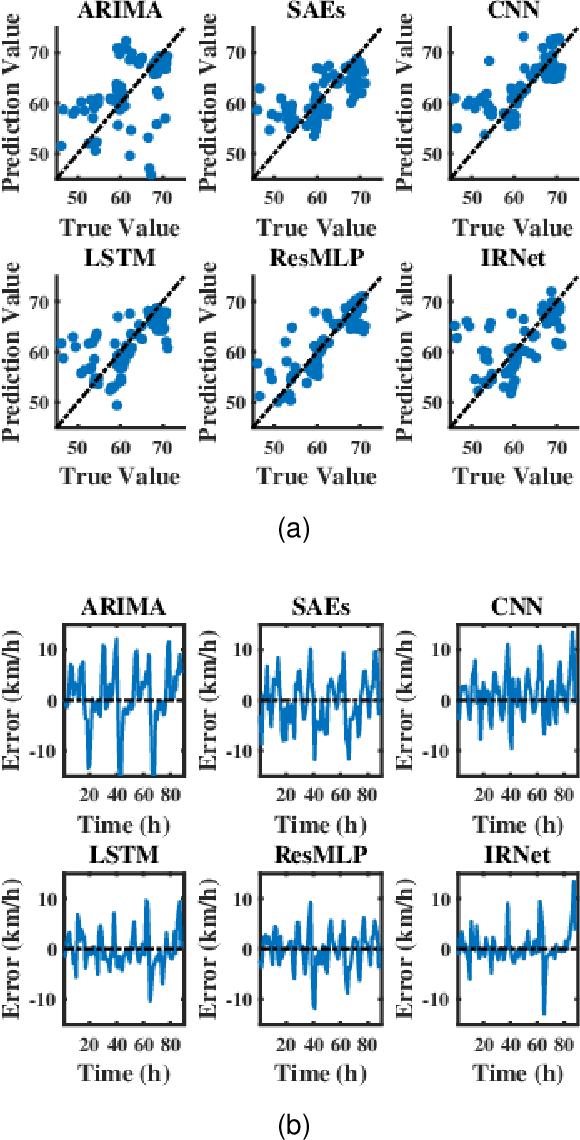
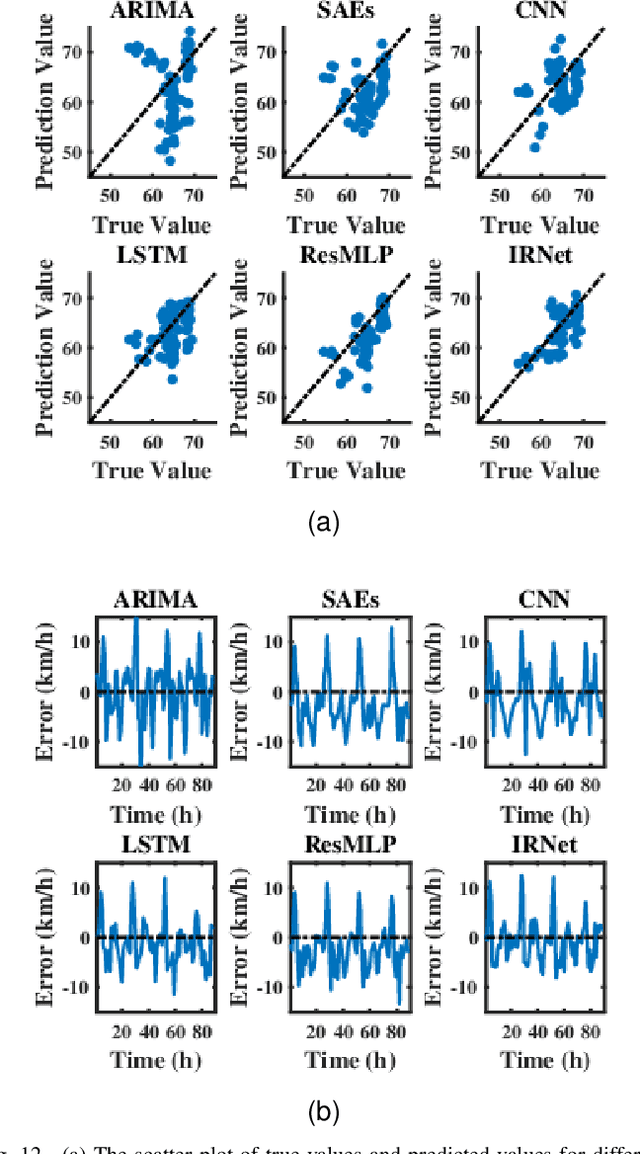
Traffic speed prediction is the key to many valuable applications, and it is also a challenging task because of its various influencing factors. Recent work attempts to obtain more information through various hybrid models, thereby improving the prediction accuracy. However, the spatial information acquisition schemes of these methods have two-level differentiation problems. Either the modeling is simple but contains little spatial information, or the modeling is complete but lacks flexibility. In order to introduce more spatial information on the basis of ensuring flexibility, this paper proposes IRNet (Transferable Intersection Reconstruction Network). First, this paper reconstructs the intersection into a virtual intersection with the same structure, which simplifies the topology of the road network. Then, the spatial information is subdivided into intersection information and sequence information of traffic flow direction, and spatiotemporal features are obtained through various models. Third, a self-attention mechanism is used to fuse spatiotemporal features for prediction. In the comparison experiment with the baseline, not only the prediction effect, but also the transfer performance has obvious advantages.
Few-Features Attack to Fool Machine Learning Models through Mask-Based GAN
Nov 12, 2019
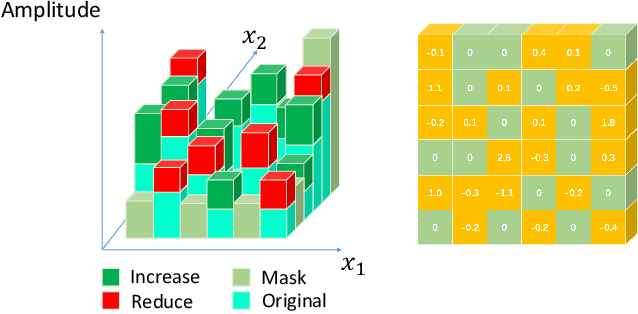
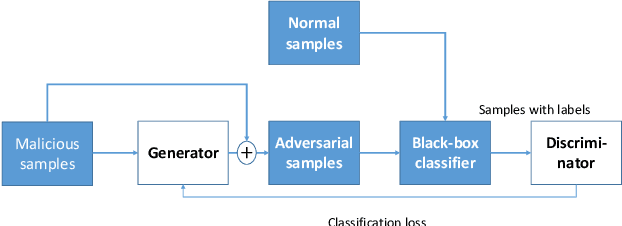
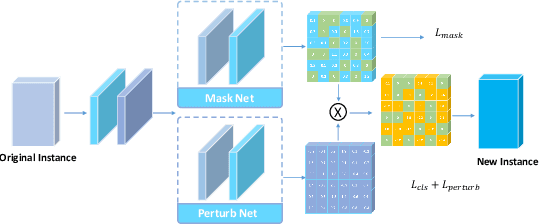
GAN is a deep-learning based generative approach to generate contents such as images, languages and speeches. Recently, studies have shown that GAN can also be applied to generative adversarial attack examples to fool the machine-learning models. In comparison with the previous non-learning adversarial example attack approaches, the GAN-based adversarial attack example approach can generate the adversarial samples quickly using the GAN architecture every time facing a new sample after training, but meanwhile needs to perturb the attack samples in great quantities, which results in the unpractical application in reality. To address this issue, we propose a new approach, named Few-Feature-Attack-GAN (FFA-GAN). FFA-GAN has a significant time-consuming advantage than the non-learning adversarial samples approaches and a better non-zero-features performance than the GANbased adversarial sample approaches. FFA-GAN can automatically generate the attack samples in the black-box attack through the GAN architecture instead of the evolutional algorithms or the other non-learning approaches. Besides, we introduce the mask mechanism into the generator network of the GAN architecture to optimize the constraint issue, which can also be regarded as the sparsity problem of the important features. During the training, the different weights of losses of the generator are set in the different training phases to ensure the divergence of the two above mentioned parallel networks of the generator. Experiments are made respectively on the structured data sets KDD-Cup 1999 and CIC-IDS 2017, in which the dimensions of the data are relatively low, and also on the unstructured data sets MNIST and CIFAR-10 with the data of the relatively high dimensions. The results of the experiments demonstrate the effectiveness and the robustness of our proposed approach.