 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransfer Learning and Vision Transformer based State-of-Health prediction of Lithium-Ion Batteries
Sep 07, 2022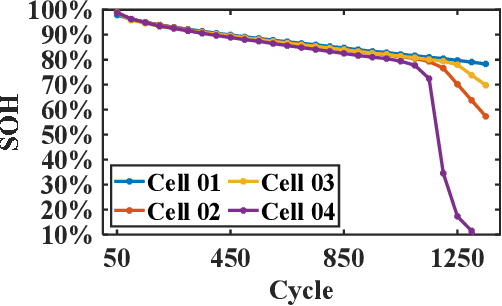
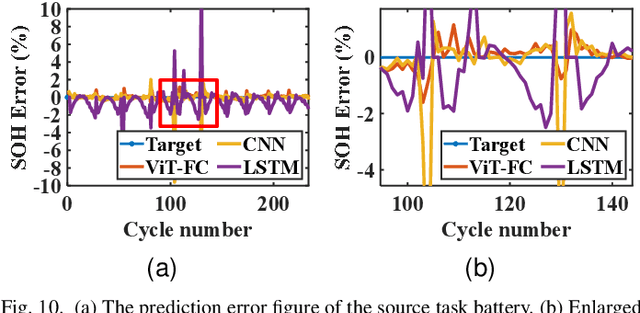
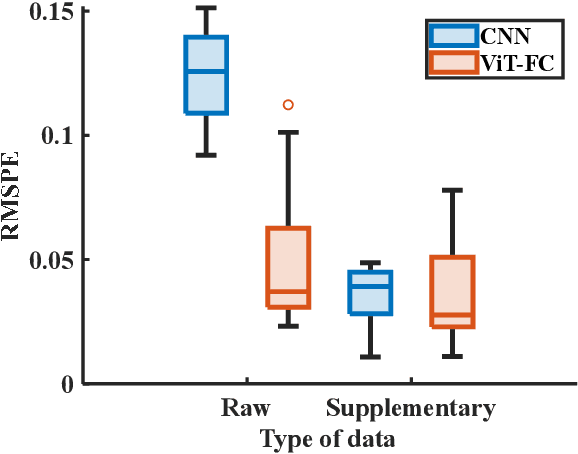
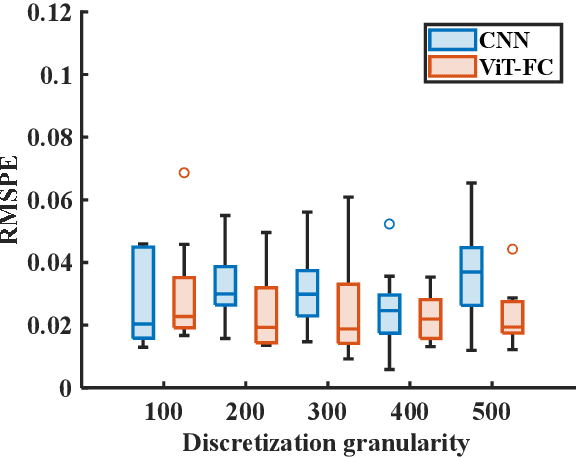
In recent years, significant progress has been made in transportation electrification. And lithium-ion batteries (LIB), as the main energy storage devices, have received widespread attention. Accurately predicting the state of health (SOH) can not only ease the anxiety of users about the battery life but also provide important information for the management of the battery. This paper presents a prediction method for SOH based on Vision Transformer (ViT) model. First, discrete charging data of a predefined voltage range is used as an input data matrix. Then, the cycle features of the battery are captured by the ViT which can obtain the global features, and the SOH is obtained by combining the cycle features with the full connection (FC) layer. At the same time, transfer learning (TL) is introduced, and the prediction model based on source task battery training is further fine-tuned according to the early cycle data of the target task battery to provide an accurate prediction. Experiments show that our method can obtain better feature expression compared with existing deep learning methods so that better prediction effect and transfer effect can be achieved.
A Transferable Intersection Reconstruction Network for Traffic Speed Prediction
Jul 22, 2022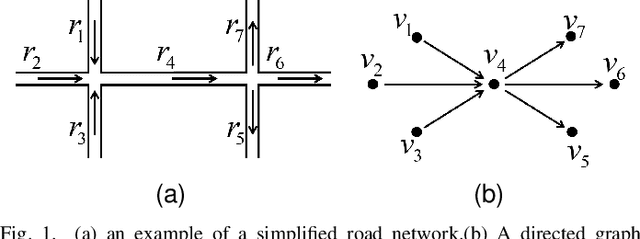
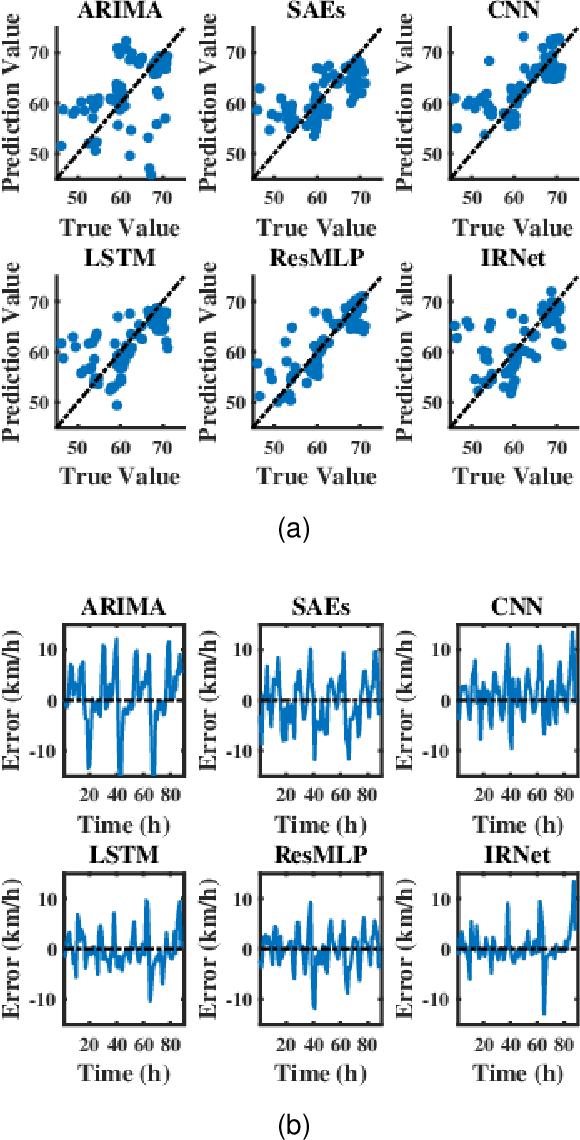
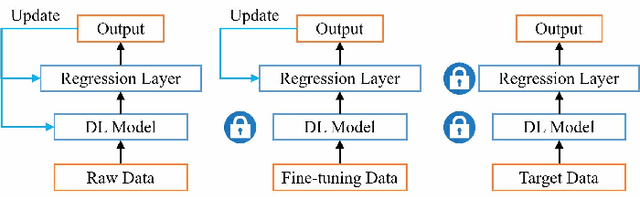
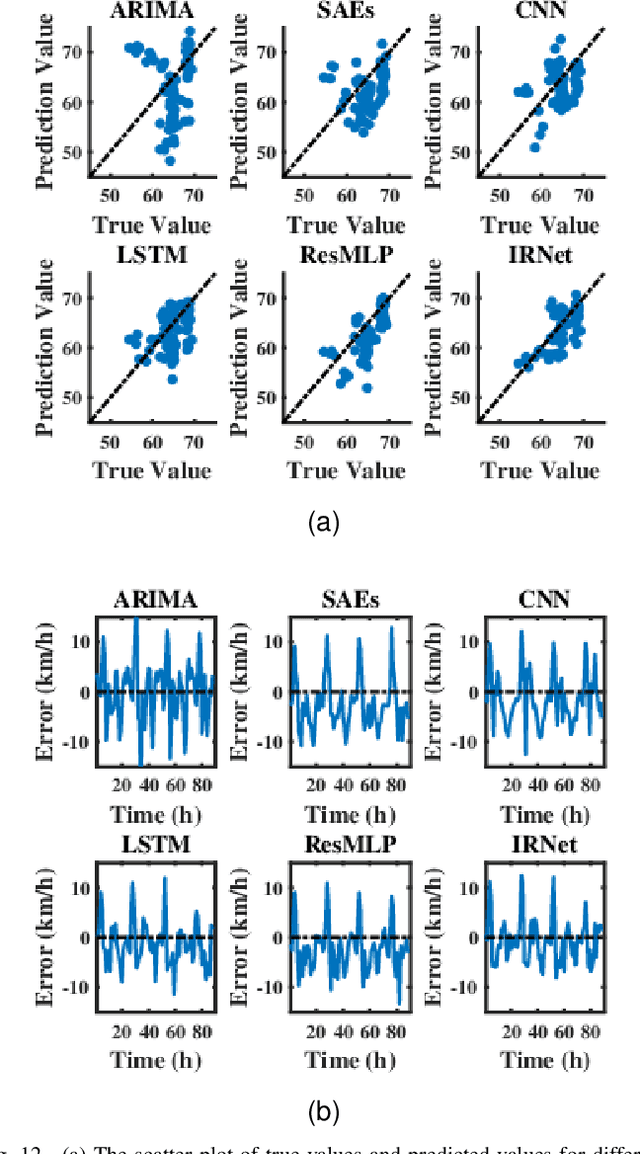
Traffic speed prediction is the key to many valuable applications, and it is also a challenging task because of its various influencing factors. Recent work attempts to obtain more information through various hybrid models, thereby improving the prediction accuracy. However, the spatial information acquisition schemes of these methods have two-level differentiation problems. Either the modeling is simple but contains little spatial information, or the modeling is complete but lacks flexibility. In order to introduce more spatial information on the basis of ensuring flexibility, this paper proposes IRNet (Transferable Intersection Reconstruction Network). First, this paper reconstructs the intersection into a virtual intersection with the same structure, which simplifies the topology of the road network. Then, the spatial information is subdivided into intersection information and sequence information of traffic flow direction, and spatiotemporal features are obtained through various models. Third, a self-attention mechanism is used to fuse spatiotemporal features for prediction. In the comparison experiment with the baseline, not only the prediction effect, but also the transfer performance has obvious advantages.