 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenPodcar2: a robust, ROS2 vehicle for self-driving research
Apr 27, 2026OpenPodcar2 is a robust, ROS2-interfaced, low-cost, open source hardware and software, autonomous vehicle platform based on an off-the-shelf, hard-canopy, mobility scooter donor vehicle. It is a modification of the previous OpenPodcar design, which extends it with robust electronics and ROS2 interfacing, to enable both research and also potential deployment use cases. The platform consists of (a) hardware components: documented as a bill of materials and build instructions; (b) integration to the general purpose OSH R4 mechatronics board and a Gazebo simulation of the vehicle, both presenting a common ROS2 interface (c) higher-level ROS2 software implementations and configurations of standard robot autonomous planning and control, including the nav2 stack which performs SLAM and enacts commands to drive the vehicle from a current to a desired pose around obstacles. OpenPodcar2 can transport a human passenger or similar load at speeds up to 15km/h, for example for use as a last-mile autonomous taxi service or to transport delivery containers similarly around a city center. It is small and safe enough to be parked in a standard research lab robust enough for some deployment cases. Total build cost was around 7,000USD from new components, or 2,000USD with a used Donor Vehicle. OpenPodcar2 thus provides a research balance between real world utility, safety, cost and robustness.
Pedestrians play chicken with an autonomous vehicle
Apr 27, 2026Automated vehicles (AVs) are commonly programmed to yield unconditionally to pedestrians in the interest of safety. However, this design choice can give rise to the Freezing Robot Problem in which pedestrians learn to assert priority at every interaction, causing vehicles to stall and make no progress. The game theoretic Sequential Chicken model has shown that, like human drivers, AVs can resolve this problem by trading credible threats of very small risks of collision or larger risks of less severe invasion of personal space against the value of time due to yielding delays. This paper presents the first demonstration and evaluation of this approach using a real AV with human subjects and shows that pedestrian behavior under experimentally constrained safety conditions can be well fitted by Sequential Chicken, with a low time value of collision, suggestive of their planning to avoid proxemic personal space penalties as well as actual collisions.
OpenScout v1.1 mobile robot: a case study on open hardware continuation
Aug 01, 2025OpenScout is an Open Source Hardware (OSH) mobile robot for research and industry. It is extended to v1.1 which includes simplified, cheaper and more powerful onboard compute hardware; a simulated ROS2 interface; and a Gazebo simulation. Changes, their rationale, project methodology, and results are reported as an OSH case study.
R4: rapid reproducible robotics research open hardware control system
Feb 15, 2024



A key component of any robot is the interface between ROS2 software and physical motors. New robots often use arbitrary, messy mixtures of closed and open motor drivers and error-prone physical mountings, wiring, and connectors to interface them. There is a need for a standardizing OSH component to abstract this complexity, as Arduino did for interfacing to smaller components. We present a OSH printed circuit board to solve this problem once and for all. On the high-level side, it interfaces to Arduino Giga -- acting as an unusually large and robust shield -- and thus to existing open source ROS software stacks. On the lower-level side, it interfaces to existing emerging standard open hardware including OSH motor drivers and relays, which can already be used to drive fully open hardware wheeled and arm robots. This enables the creation of a family of standardized, fully open hardware, fully reproducible, research platforms.
Incorporating Background Knowledge in Symbolic Regression using a Computer Algebra System
Jan 27, 2023Symbolic Regression (SR) can generate interpretable, concise expressions that fit a given dataset, allowing for more human understanding of the structure than black-box approaches. The addition of background knowledge (in the form of symbolic mathematical constraints) allows for the generation of expressions that are meaningful with respect to theory while also being consistent with data. We specifically examine the addition of constraints to traditional genetic algorithm (GA) based SR (PySR) as well as a Markov-chain Monte Carlo (MCMC) based Bayesian SR architecture (Bayesian Machine Scientist), and apply these to rediscovering adsorption equations from experimental, historical datasets. We find that, while hard constraints prevent GA and MCMC SR from searching, soft constraints can lead to improved performance both in terms of search effectiveness and model meaningfulness, with computational costs increasing by about an order-of-magnitude. If the constraints do not correlate well with the dataset or expected models, they can hinder the search of expressions. We find Bayesian SR is better these constraints (as the Bayesian prior) than by modifying the fitness function in the GA
MACARONS: Open hardware for vertical farming
Oct 10, 2022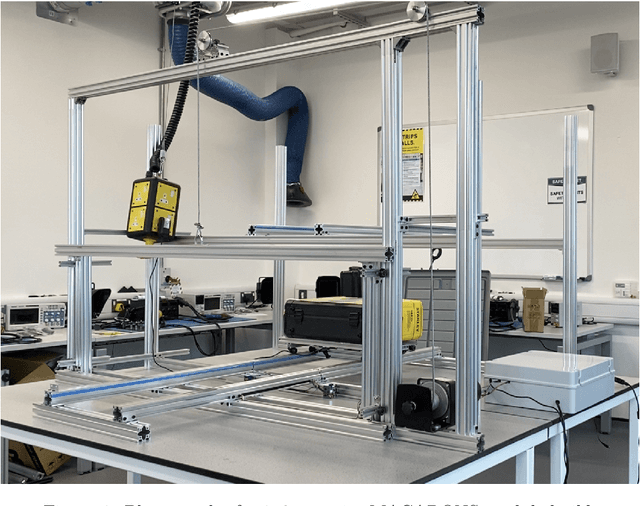
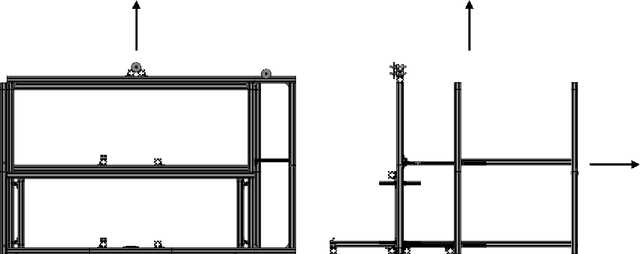
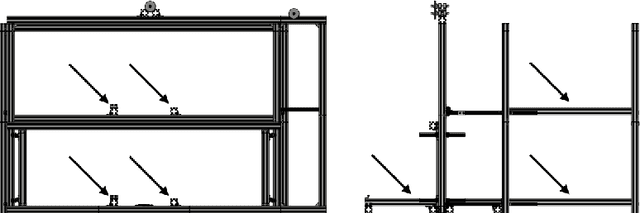
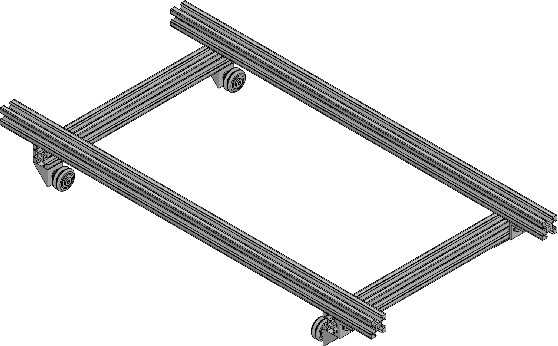
The Modular Automated Crop Array Online System (MACARONS) is an extensible, scalable, open hardware system for plant transport in automated horticulture systems such as vertical farms. It is specified to move trays of plants up to 1060mm x 630mm and 12.5kg at a rate of 100mm/s along the guide rails and 33.3mm/s up the lifts, such as between stations for monitoring and actuating plants. The cost for the construction of one grow unit of MACARONS is 144.96USD which equates to 128.85USD/m$^2$ of grow area. The designs are released and meets the requirements of CERN-OSH-W, which includes step-by-step graphical build instructions and can be built by a typical technical person in one day at a cost of 1535.50 USD. Integrated tests are included in the build instructions are used to validate against the specifications, and we report on a successful build. Through a simple analysis, we demonstrate that MACARONS can operate at a rate sufficient to automate tray loading/unloading, to reduce labour costs in a vertical farm.
OpenPodcar: an Open Source Vehicle for Self-Driving Car Research
May 09, 2022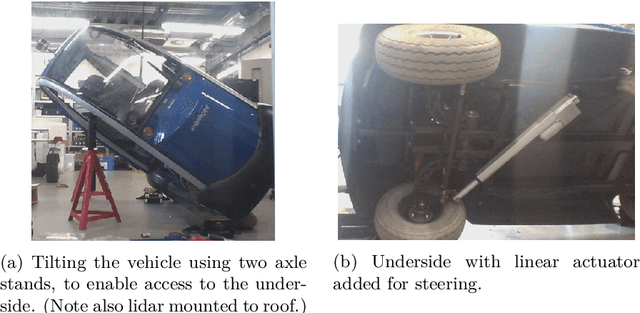
OpenPodcar is a low-cost, open source hardware and software, autonomous vehicle research platform based on an off-the-shelf, hard-canopy, mobility scooter donor vehicle. Hardware and software build instructions are provided to convert the donor vehicle into a low-cost and fully autonomous platform. The open platform consists of (a) hardware components: CAD designs, bill of materials, and build instructions; (b) Arduino, ROS and Gazebo control and simulation software files which provide standard ROS interfaces and simulation of the vehicle; and (c) higher-level ROS software implementations and configurations of standard robot autonomous planning and control, including the move_base interface with Timed-Elastic-Band planner which enacts commands to drive the vehicle from a current to a desired pose around obstacles. The vehicle is large enough to transport a human passenger or similar load at speeds up to 15km/h, for example for use as a last-mile autonomous taxi service or to transport delivery containers similarly around a city center. It is small and safe enough to be parked in a standard research lab and be used for realistic human-vehicle interaction studies. System build cost from new components is around USD7,000 in total in 2022. OpenPodcar thus provides a good balance between real world utility, safety, cost and research convenience.
Domain Generalisation for Object Detection
Mar 17, 2022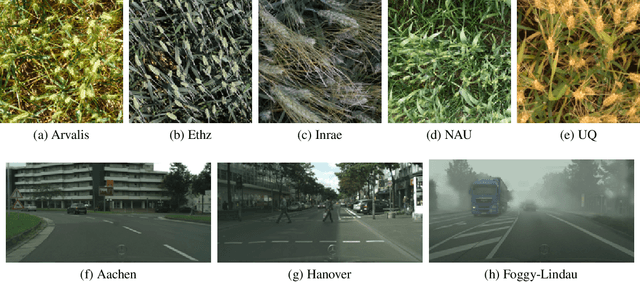
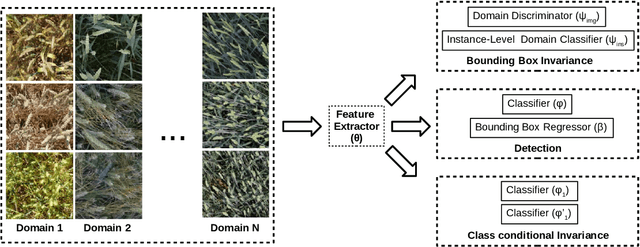
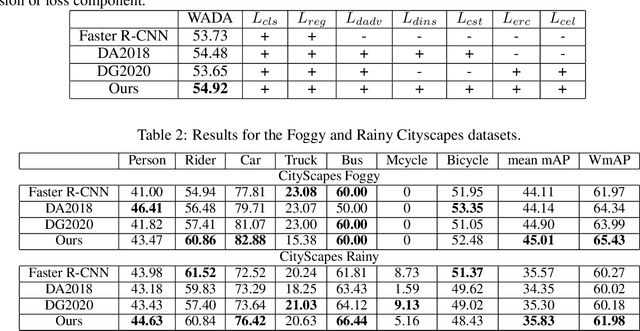
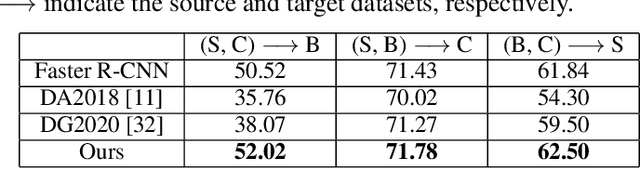
Domain generalisation aims to promote the learning of domain-invariant features while suppressing domain specific features, so that a model can generalise well on previously unseen target domains. This paper studies domain generalisation in the object detection setting. We propose new terms for handling both the bounding box detector and domain belonging, and incorporate them with consistency regularisation. This allows us to learn a domain agnostic feature representation for object detection, applicable to the problem of domain generalisation. The proposed approach is evaluated using four standard object detection datasets with available domain metadata, namely GWHD, Cityscapes, BDD100K, Sim10K and exhibits consistently superior generalisation performance over baselines.
Agricultural Robotics: The Future of Robotic Agriculture
Aug 02, 2018Agri-Food is the largest manufacturing sector in the UK. It supports a food chain that generates over {\pounds}108bn p.a., with 3.9m employees in a truly international industry and exports {\pounds}20bn of UK manufactured goods. However, the global food chain is under pressure from population growth, climate change, political pressures affecting migration, population drift from rural to urban regions and the demographics of an aging global population. These challenges are recognised in the UK Industrial Strategy white paper and backed by significant investment via a Wave 2 Industrial Challenge Fund Investment ("Transforming Food Production: from Farm to Fork"). Robotics and Autonomous Systems (RAS) and associated digital technologies are now seen as enablers of this critical food chain transformation. To meet these challenges, this white paper reviews the state of the art in the application of RAS in Agri-Food production and explores research and innovation needs to ensure these technologies reach their full potential and deliver the necessary impacts in the Agri-Food sector.