 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeR4: rapid reproducible robotics research open hardware control system
Feb 15, 2024



A key component of any robot is the interface between ROS2 software and physical motors. New robots often use arbitrary, messy mixtures of closed and open motor drivers and error-prone physical mountings, wiring, and connectors to interface them. There is a need for a standardizing OSH component to abstract this complexity, as Arduino did for interfacing to smaller components. We present a OSH printed circuit board to solve this problem once and for all. On the high-level side, it interfaces to Arduino Giga -- acting as an unusually large and robust shield -- and thus to existing open source ROS software stacks. On the lower-level side, it interfaces to existing emerging standard open hardware including OSH motor drivers and relays, which can already be used to drive fully open hardware wheeled and arm robots. This enables the creation of a family of standardized, fully open hardware, fully reproducible, research platforms.
OpenPodcar: an Open Source Vehicle for Self-Driving Car Research
May 09, 2022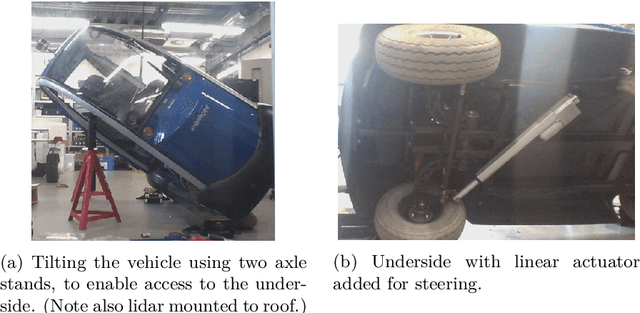
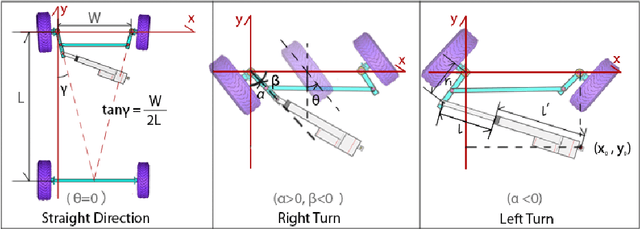
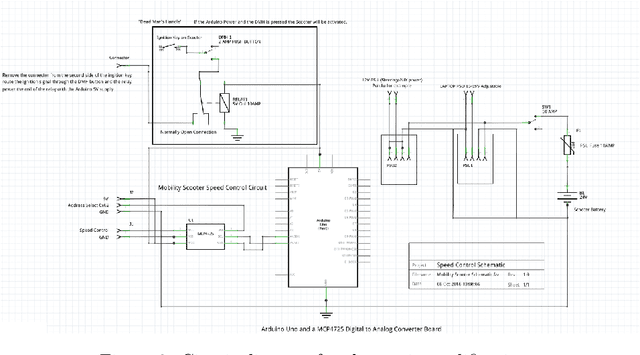
OpenPodcar is a low-cost, open source hardware and software, autonomous vehicle research platform based on an off-the-shelf, hard-canopy, mobility scooter donor vehicle. Hardware and software build instructions are provided to convert the donor vehicle into a low-cost and fully autonomous platform. The open platform consists of (a) hardware components: CAD designs, bill of materials, and build instructions; (b) Arduino, ROS and Gazebo control and simulation software files which provide standard ROS interfaces and simulation of the vehicle; and (c) higher-level ROS software implementations and configurations of standard robot autonomous planning and control, including the move_base interface with Timed-Elastic-Band planner which enacts commands to drive the vehicle from a current to a desired pose around obstacles. The vehicle is large enough to transport a human passenger or similar load at speeds up to 15km/h, for example for use as a last-mile autonomous taxi service or to transport delivery containers similarly around a city center. It is small and safe enough to be parked in a standard research lab and be used for realistic human-vehicle interaction studies. System build cost from new components is around USD7,000 in total in 2022. OpenPodcar thus provides a good balance between real world utility, safety, cost and research convenience.