 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenPodcar: an Open Source Vehicle for Self-Driving Car Research
May 09, 2022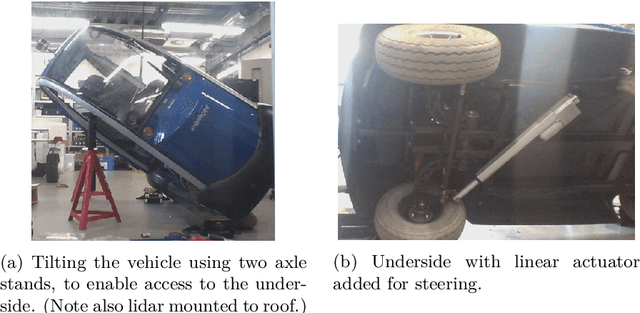
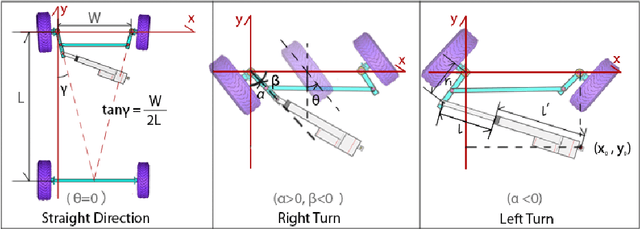
OpenPodcar is a low-cost, open source hardware and software, autonomous vehicle research platform based on an off-the-shelf, hard-canopy, mobility scooter donor vehicle. Hardware and software build instructions are provided to convert the donor vehicle into a low-cost and fully autonomous platform. The open platform consists of (a) hardware components: CAD designs, bill of materials, and build instructions; (b) Arduino, ROS and Gazebo control and simulation software files which provide standard ROS interfaces and simulation of the vehicle; and (c) higher-level ROS software implementations and configurations of standard robot autonomous planning and control, including the move_base interface with Timed-Elastic-Band planner which enacts commands to drive the vehicle from a current to a desired pose around obstacles. The vehicle is large enough to transport a human passenger or similar load at speeds up to 15km/h, for example for use as a last-mile autonomous taxi service or to transport delivery containers similarly around a city center. It is small and safe enough to be parked in a standard research lab and be used for realistic human-vehicle interaction studies. System build cost from new components is around USD7,000 in total in 2022. OpenPodcar thus provides a good balance between real world utility, safety, cost and research convenience.
Pedestrian Models for Autonomous Driving Part II: high level models of human behaviour
Mar 26, 2020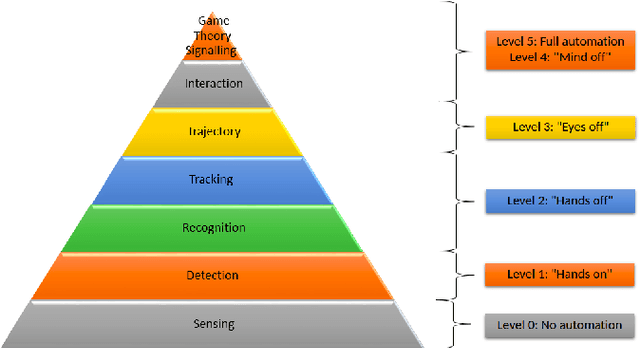

Autonomous vehicles (AVs) must share space with human pedestrians, both in on-road cases such as cars at pedestrian crossings and off-road cases such as delivery vehicles navigating through crowds on high-streets. Unlike static and kinematic obstacles, pedestrians are active agents with complex, interactive motions. Planning AV actions in the presence of pedestrians thus requires modelling of their probable future behaviour as well as detection and tracking which enable such modelling. This narrative review article is Part II of a pair which together survey the current technology stack involved in this process, organising recent research into a hierarchical taxonomy ranging from low level image detection to high-level psychological models, from the perspective of an AV designer. This self-contained Part II covers the higher levels of this stack, consisting of models of pedestrian behaviour, from prediction of individual pedestrians' likely destinations and paths, to game theoretic models of interactions between pedestrians and autonomous vehicles. This survey clearly shows that, although there are good models for optimal walking behaviour, high-level psychological and social modelling of pedestrian behaviour still remains an open research question that requires many conceptual issues to be clarified by the community. At these levels, early work has been done on descriptive and qualitative models of behaviour, but much work is still needed to translate them into quantitative algorithms for practical AV control.
Pedestrian Models for Autonomous Driving Part I: low level models, from sensing to tracking
Feb 26, 2020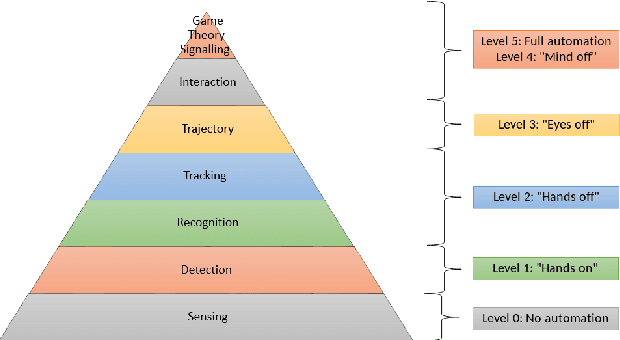

Autonomous vehicles (AVs) must share space with human pedestrians, both in on-road cases such as cars at pedestrian crossings and off-road cases such as delivery vehicles navigating through crowds on high-streets. Unlike static and kinematic obstacles, pedestrians are active agents with complex, interactive motions. Planning AV actions in the presence of pedestrians thus requires modelling of their probable future behaviour as well as detection and tracking which enable such modelling. This narrative review article is Part I of a pair which together survey the current technology stack involved in this process, organising recent research into a hierarchical taxonomy ranging from low level image detection to high-level psychology models, from the perspective of an AV designer. This self-contained Part I covers the lower levels of this stack, from sensing, through detection and recognition, up to tracking of pedestrians. Technologies at these levels are found to be mature and available as foundations for use in higher level systems such as behaviour modelling, prediction and interaction control.