 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimalist Visual Inertial Odometry
May 19, 2026Visual-Inertial Odometry(VIO), which is critical to mobile robot navigation, uses cameras with a large number of pixels. Capturing and processing camera images requires significant resources. This work presents a minimalist approach to planar odometry, demonstrating that just four visual measurements and an IMU can provide robust motion estimation for differential-drive robots. Our key insight is that four downward-facing photodiodes that sense the world through optical Gabor masks produce signals that encode speed. Based on this, we jointly optimize the mask parameters alongside a Temporal Convolutional Network (TCN) using a physically-grounded simulator. The resulting model decodes speed from just the four measurements produced by the photodiodes. Pairing these estimates with the angular speed from an IMU yields a continuous planar trajectory. We validate our approach with a prototype sensor mounted on a differential drive robot. Across diverse indoor and outdoor terrains, our system closely tracks the reference ground truth without any real-world fine-tuning. Our work shows that minimalist sensing enables efficient and accurate planar odometry.
Nano-U: Efficient Terrain Segmentation for Tiny Robot Navigation
May 11, 2026Terrain segmentation is a fundamental capability for autonomous mobile robots operating in unstructured outdoor environments. However, state-of-the-art models are incompatible with the memory and compute constraints typical of microcontrollers, limiting scalable deployment in small robotics platforms. To address this gap, we develop a complete framework for robust binary terrain segmentation on a low-cost microcontroller. At the core of our approach we design Nano-U, a highly compact binary segmentation network with a few thousand parameters. To compensate for the network's minimal capacity, we train Nano-U via Quantization-Aware Distillation (QAD), combining knowledge distillation and quantization-aware training. This allows the final quantized model to achieve excellent results on the Botanic Garden dataset and to perform very well on TinyAgri, a custom agricultural field dataset with more challenging scenes. We deploy the quantized Nano-U on a commodity microcontroller by extending MicroFlow, a compiler-based inference engine for TinyML implemented in Rust. By eliminating interpreter overhead and dynamic memory allocation, the quantized model executes on an ESP32-S3 with a minimal memory footprint and low latency. This compiler-based execution demonstrates a viable and energy-efficient solution for perception on low-cost robotic platforms.
Stress Detection Using Wearable Physiological and Sociometric Sensors
Apr 14, 2026Stress remains a significant social problem for individuals in modern societies. This paper presents a machine learning approach for the automatic detection of stress of people in a social situation by combining two sensor systems that capture physiological and social responses. We compare the performance using different classifiers including support vector machine, AdaBoost, and k-nearest neighbor. Our experimental results show that by combining the measurements from both sensor systems, we could accurately discriminate between stressful and neutral situations during a controlled Trier social stress test (TSST). Moreover, this paper assesses the discriminative ability of each sensor modality individually and considers their suitability for real-time stress detection. Finally, we present an study of the most discriminative features for stress detection.
Causality-enhanced Decision-Making for Autonomous Mobile Robots in Dynamic Environments
Apr 16, 2025



The growing integration of robots in shared environments -- such as warehouses, shopping centres, and hospitals -- demands a deep understanding of the underlying dynamics and human behaviours, including how, when, and where individuals engage in various activities and interactions. This knowledge goes beyond simple correlation studies and requires a more comprehensive causal analysis. By leveraging causal inference to model cause-and-effect relationships, we can better anticipate critical environmental factors and enable autonomous robots to plan and execute tasks more effectively. To this end, we propose a novel causality-based decision-making framework that reasons over a learned causal model to predict battery usage and human obstructions, understanding how these factors could influence robot task execution. Such reasoning framework assists the robot in deciding when and how to complete a given task. To achieve this, we developed also PeopleFlow, a new Gazebo-based simulator designed to model context-sensitive human-robot spatial interactions in shared workspaces. PeopleFlow features realistic human and robot trajectories influenced by contextual factors such as time, environment layout, and robot state, and can simulate a large number of agents. While the simulator is general-purpose, in this paper we focus on a warehouse-like environment as a case study, where we conduct an extensive evaluation benchmarking our causal approach against a non-causal baseline. Our findings demonstrate the efficacy of the proposed solutions, highlighting how causal reasoning enables autonomous robots to operate more efficiently and safely in dynamic environments shared with humans.
CAnDOIT: Causal Discovery with Observational and Interventional Data from Time-Series
Oct 07, 2024The study of cause-and-effect is of the utmost importance in many branches of science, but also for many practical applications of intelligent systems. In particular, identifying causal relationships in situations that include hidden factors is a major challenge for methods that rely solely on observational data for building causal models. This paper proposes CAnDOIT, a causal discovery method to reconstruct causal models using both observational and interventional time-series data. The use of interventional data in the causal analysis is crucial for real-world applications, such as robotics, where the scenario is highly complex and observational data alone are often insufficient to uncover the correct causal structure. Validation of the method is performed initially on randomly generated synthetic models and subsequently on a well-known benchmark for causal structure learning in a robotic manipulation environment. The experiments demonstrate that the approach can effectively handle data from interventions and exploit them to enhance the accuracy of the causal analysis. A Python implementation of CAnDOIT has also been developed and is publicly available on GitHub: https://github.com/lcastri/causalflow.
MicroFlow: An Efficient Rust-Based Inference Engine for TinyML
Sep 28, 2024



MicroFlow is an open-source TinyML framework for the deployment of Neural Networks (NNs) on embedded systems using the Rust programming language, specifically designed for efficiency and robustness, which is suitable for applications in critical environments. To achieve these objectives, MicroFlow employs a compiler-based inference engine approach, coupled with Rust's memory safety and features. The proposed solution enables the successful deployment of NNs on highly resource-constrained devices, including bare-metal 8-bit microcontrollers with only 2kB of RAM. Furthermore, MicroFlow is able to use less Flash and RAM memory than other state-of-the-art solutions for deploying NN reference models (i.e. wake-word and person detection). It can also achieve faster inference compared to existing engines on medium-size NNs, and similar performance on bigger ones. The experimental results prove the efficiency and suitability of MicroFlow for the deployment of TinyML models in critical environments where resources are particularly limited.
Tiny Robotics Dataset and Benchmark for Continual Object Detection
Sep 24, 2024



Detecting objects in mobile robotics is crucial for numerous applications, from autonomous navigation to inspection. However, robots are often required to perform tasks in different domains with respect to the training one and need to adapt to these changes. Tiny mobile robots, subject to size, power, and computational constraints, encounter even more difficulties in running and adapting these algorithms. Such adaptability, though, is crucial for real-world deployment, where robots must operate effectively in dynamic and unpredictable settings. In this work, we introduce a novel benchmark to evaluate the continual learning capabilities of object detection systems in tiny robotic platforms. Our contributions include: (i) Tiny Robotics Object Detection (TiROD), a comprehensive dataset collected using a small mobile robot, designed to test the adaptability of object detectors across various domains and classes; (ii) an evaluation of state-of-the-art real-time object detectors combined with different continual learning strategies on this dataset, providing detailed insights into their performance and limitations; and (iii) we publish the data and the code to replicate the results to foster continuous advancements in this field. Our benchmark results indicate key challenges that must be addressed to advance the development of robust and efficient object detection systems for tiny robotics.
Replay Consolidation with Label Propagation for Continual Object Detection
Sep 09, 2024


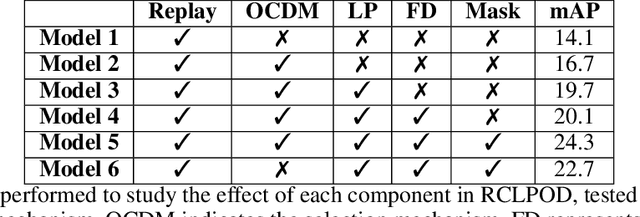
Object Detection is a highly relevant computer vision problem with many applications such as robotics and autonomous driving. Continual Learning~(CL) considers a setting where a model incrementally learns new information while retaining previously acquired knowledge. This is particularly challenging since Deep Learning models tend to catastrophically forget old knowledge while training on new data. In particular, Continual Learning for Object Detection~(CLOD) poses additional difficulties compared to CL for Classification. In CLOD, images from previous tasks may contain unknown classes that could reappear labeled in future tasks. These missing annotations cause task interference issues for replay-based approaches. As a result, most works in the literature have focused on distillation-based approaches. However, these approaches are effective only when there is a strong overlap of classes across tasks. To address the issues of current methodologies, we propose a novel technique to solve CLOD called Replay Consolidation with Label Propagation for Object Detection (RCLPOD). Based on the replay method, our solution avoids task interference issues by enhancing the buffer memory samples. Our method is evaluated against existing techniques in CLOD literature, demonstrating its superior performance on established benchmarks like VOC and COCO.
Latent Distillation for Continual Object Detection at the Edge
Sep 03, 2024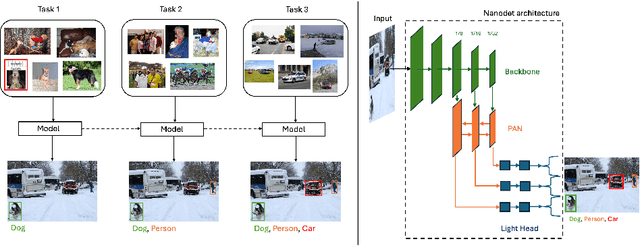
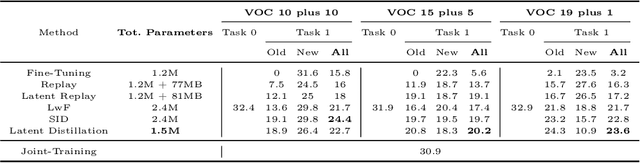
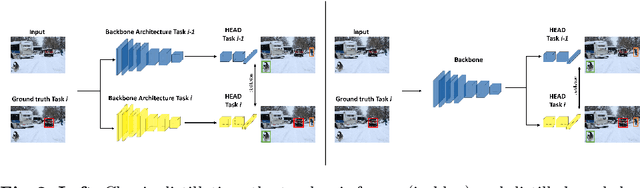
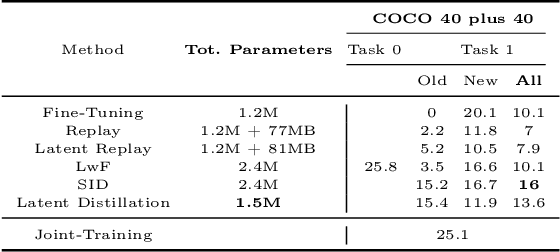
While numerous methods achieving remarkable performance exist in the Object Detection literature, addressing data distribution shifts remains challenging. Continual Learning (CL) offers solutions to this issue, enabling models to adapt to new data while maintaining performance on previous data. This is particularly pertinent for edge devices, common in dynamic environments like automotive and robotics. In this work, we address the memory and computation constraints of edge devices in the Continual Learning for Object Detection (CLOD) scenario. Specifically, (i) we investigate the suitability of an open-source, lightweight, and fast detector, namely NanoDet, for CLOD on edge devices, improving upon larger architectures used in the literature. Moreover, (ii) we propose a novel CL method, called Latent Distillation~(LD), that reduces the number of operations and the memory required by state-of-the-art CL approaches without significantly compromising detection performance. Our approach is validated using the well-known VOC and COCO benchmarks, reducing the distillation parameter overhead by 74\% and the Floating Points Operations~(FLOPs) by 56\% per model update compared to other distillation methods.
neuROSym: Deployment and Evaluation of a ROS-based Neuro-Symbolic Model for Human Motion Prediction
Jun 24, 2024Autonomous mobile robots can rely on several human motion detection and prediction systems for safe and efficient navigation in human environments, but the underline model architectures can have different impacts on the trustworthiness of the robot in the real world. Among existing solutions for context-aware human motion prediction, some approaches have shown the benefit of integrating symbolic knowledge with state-of-the-art neural networks. In particular, a recent neuro-symbolic architecture (NeuroSyM) has successfully embedded context with a Qualitative Trajectory Calculus (QTC) for spatial interactions representation. This work achieved better performance than neural-only baseline architectures on offline datasets. In this paper, we extend the original architecture to provide neuROSym, a ROS package for robot deployment in real-world scenarios, which can run, visualise, and evaluate previous neural-only and neuro-symbolic models for motion prediction online. We evaluated these models, NeuroSyM and a baseline SGAN, on a TIAGo robot in two scenarios with different human motion patterns. We assessed accuracy and runtime performance of the prediction models, showing a general improvement in case our neuro-symbolic architecture is used. We make the neuROSym package1 publicly available to the robotics community.