 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausality-enhanced Decision-Making for Autonomous Mobile Robots in Dynamic Environments
Apr 16, 2025



The growing integration of robots in shared environments -- such as warehouses, shopping centres, and hospitals -- demands a deep understanding of the underlying dynamics and human behaviours, including how, when, and where individuals engage in various activities and interactions. This knowledge goes beyond simple correlation studies and requires a more comprehensive causal analysis. By leveraging causal inference to model cause-and-effect relationships, we can better anticipate critical environmental factors and enable autonomous robots to plan and execute tasks more effectively. To this end, we propose a novel causality-based decision-making framework that reasons over a learned causal model to predict battery usage and human obstructions, understanding how these factors could influence robot task execution. Such reasoning framework assists the robot in deciding when and how to complete a given task. To achieve this, we developed also PeopleFlow, a new Gazebo-based simulator designed to model context-sensitive human-robot spatial interactions in shared workspaces. PeopleFlow features realistic human and robot trajectories influenced by contextual factors such as time, environment layout, and robot state, and can simulate a large number of agents. While the simulator is general-purpose, in this paper we focus on a warehouse-like environment as a case study, where we conduct an extensive evaluation benchmarking our causal approach against a non-causal baseline. Our findings demonstrate the efficacy of the proposed solutions, highlighting how causal reasoning enables autonomous robots to operate more efficiently and safely in dynamic environments shared with humans.
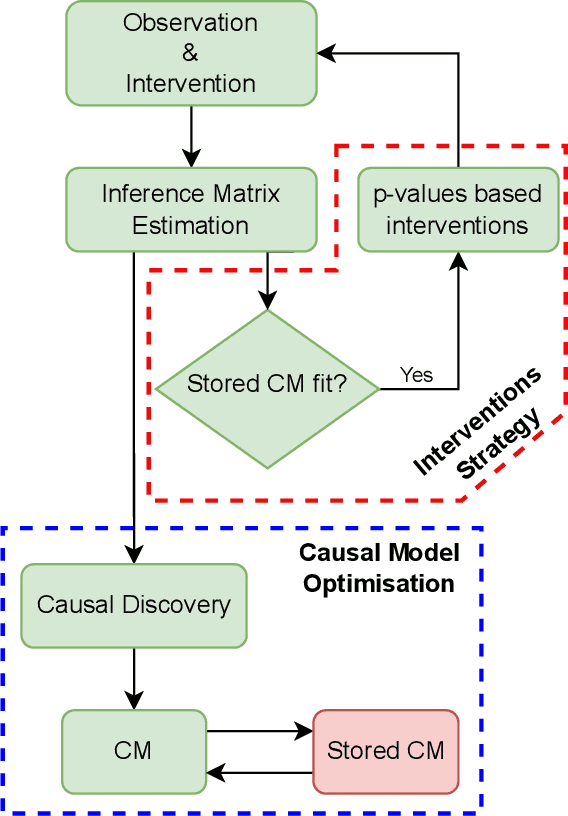
CAnDOIT: Causal Discovery with Observational and Interventional Data from Time-Series
Oct 07, 2024The study of cause-and-effect is of the utmost importance in many branches of science, but also for many practical applications of intelligent systems. In particular, identifying causal relationships in situations that include hidden factors is a major challenge for methods that rely solely on observational data for building causal models. This paper proposes CAnDOIT, a causal discovery method to reconstruct causal models using both observational and interventional time-series data. The use of interventional data in the causal analysis is crucial for real-world applications, such as robotics, where the scenario is highly complex and observational data alone are often insufficient to uncover the correct causal structure. Validation of the method is performed initially on randomly generated synthetic models and subsequently on a well-known benchmark for causal structure learning in a robotic manipulation environment. The experiments demonstrate that the approach can effectively handle data from interventions and exploit them to enhance the accuracy of the causal analysis. A Python implementation of CAnDOIT has also been developed and is publicly available on GitHub: https://github.com/lcastri/causalflow.
neuROSym: Deployment and Evaluation of a ROS-based Neuro-Symbolic Model for Human Motion Prediction
Jun 24, 2024Autonomous mobile robots can rely on several human motion detection and prediction systems for safe and efficient navigation in human environments, but the underline model architectures can have different impacts on the trustworthiness of the robot in the real world. Among existing solutions for context-aware human motion prediction, some approaches have shown the benefit of integrating symbolic knowledge with state-of-the-art neural networks. In particular, a recent neuro-symbolic architecture (NeuroSyM) has successfully embedded context with a Qualitative Trajectory Calculus (QTC) for spatial interactions representation. This work achieved better performance than neural-only baseline architectures on offline datasets. In this paper, we extend the original architecture to provide neuROSym, a ROS package for robot deployment in real-world scenarios, which can run, visualise, and evaluate previous neural-only and neuro-symbolic models for motion prediction online. We evaluated these models, NeuroSyM and a baseline SGAN, on a TIAGo robot in two scenarios with different human motion patterns. We assessed accuracy and runtime performance of the prediction models, showing a general improvement in case our neuro-symbolic architecture is used. We make the neuROSym package1 publicly available to the robotics community.
Experimental Evaluation of ROS-Causal in Real-World Human-Robot Spatial Interaction Scenarios
Jun 07, 2024



Deploying robots in human-shared environments requires a deep understanding of how nearby agents and objects interact. Employing causal inference to model cause-and-effect relationships facilitates the prediction of human behaviours and enables the anticipation of robot interventions. However, a significant challenge arises due to the absence of implementation of existing causal discovery methods within the ROS ecosystem, the standard de-facto framework in robotics, hindering effective utilisation on real robots. To bridge this gap, in our previous work we proposed ROS-Causal, a ROS-based framework designed for onboard data collection and causal discovery in human-robot spatial interactions. In this work, we present an experimental evaluation of ROS-Causal both in simulation and on a new dataset of human-robot spatial interactions in a lab scenario, to assess its performance and effectiveness. Our analysis demonstrates the efficacy of this approach, showcasing how causal models can be extracted directly onboard by robots during data collection. The online causal models generated from the simulation are consistent with those from lab experiments. These findings can help researchers to enhance the performance of robotic systems in shared environments, firstly by studying the causal relations between variables in simulation without real people, and then facilitating the actual robot deployment in real human environments. ROS-Causal: https://lcastri.github.io/roscausal
ROS-Causal: A ROS-based Causal Analysis Framework for Human-Robot Interaction Applications
Feb 29, 2024


Deploying robots in human-shared spaces requires understanding interactions among nearby agents and objects. Modelling cause-and-effect relations through causal inference aids in predicting human behaviours and anticipating robot interventions. However, a critical challenge arises as existing causal discovery methods currently lack an implementation inside the ROS ecosystem, the standard de facto in robotics, hindering effective utilisation in robotics. To address this gap, this paper introduces ROS-Causal, a ROS-based framework for onboard data collection and causal discovery in human-robot spatial interactions. An ad-hoc simulator, integrated with ROS, illustrates the approach's effectiveness, showcasing the robot onboard generation of causal models during data collection. ROS-Causal is available on GitHub: https://github.com/lcastri/roscausal.git.
Efficient Causal Discovery for Robotics Applications
Oct 24, 2023Using robots for automating tasks in environments shared with humans, such as warehouses, shopping centres, or hospitals, requires these robots to comprehend the fundamental physical interactions among nearby agents and objects. Specifically, creating models to represent cause-and-effect relationships among these elements can aid in predicting unforeseen human behaviours and anticipate the outcome of particular robot actions. To be suitable for robots, causal analysis must be both fast and accurate, meeting real-time demands and the limited computational resources typical in most robotics applications. In this paper, we present a practical demonstration of our approach for fast and accurate causal analysis, known as Filtered PCMCI (F-PCMCI), along with a real-world robotics application. The provided application illustrates how our F-PCMCI can accurately and promptly reconstruct the causal model of a human-robot interaction scenario, which can then be leveraged to enhance the quality of the interaction.
Qualitative Prediction of Multi-Agent Spatial Interactions
Jun 30, 2023



Deploying service robots in our daily life, whether in restaurants, warehouses or hospitals, calls for the need to reason on the interactions happening in dense and dynamic scenes. In this paper, we present and benchmark three new approaches to model and predict multi-agent interactions in dense scenes, including the use of an intuitive qualitative representation. The proposed solutions take into account static and dynamic context to predict individual interactions. They exploit an input- and a temporal-attention mechanism, and are tested on medium and long-term time horizons. The first two approaches integrate different relations from the so-called Qualitative Trajectory Calculus (QTC) within a state-of-the-art deep neural network to create a symbol-driven neural architecture for predicting spatial interactions. The third approach implements a purely data-driven network for motion prediction, the output of which is post-processed to predict QTC spatial interactions. Experimental results on a popular robot dataset of challenging crowded scenarios show that the purely data-driven prediction approach generally outperforms the other two. The three approaches were further evaluated on a different but related human scenarios to assess their generalisation capability.
A Neuro-Symbolic Approach for Enhanced Human Motion Prediction
Apr 23, 2023Reasoning on the context of human beings is crucial for many real-world applications especially for those deploying autonomous systems (e.g. robots). In this paper, we present a new approach for context reasoning to further advance the field of human motion prediction. We therefore propose a neuro-symbolic approach for human motion prediction (NeuroSyM), which weights differently the interactions in the neighbourhood by leveraging an intuitive technique for spatial representation called Qualitative Trajectory Calculus (QTC). The proposed approach is experimentally tested on medium and long term time horizons using two architectures from the state of art, one of which is a baseline for human motion prediction and the other is a baseline for generic multivariate time-series prediction. Six datasets of challenging crowded scenarios, collected from both fixed and mobile cameras, were used for testing. Experimental results show that the NeuroSyM approach outperforms in most cases the baseline architectures in terms of prediction accuracy.
Enhancing Causal Discovery from Robot Sensor Data in Dynamic Scenarios
Feb 20, 2023Identifying the main features and learning the causal relationships of a dynamic system from time-series of sensor data are key problems in many real-world robot applications. In this paper, we propose an extension of a state-of-the-art causal discovery method, PCMCI, embedding an additional feature-selection module based on transfer entropy. Starting from a prefixed set of variables, the new algorithm reconstructs the causal model of the observed system by considering only its main features and neglecting those deemed unnecessary for understanding the evolution of the system. We first validate the method on a toy problem and on synthetic data of brain network, for which the ground-truth models are available, and then on a real-world robotics scenario using a large-scale time-series dataset of human trajectories. The experiments demonstrate that our solution outperforms the previous state-of-the-art technique in terms of accuracy and computational efficiency, allowing better and faster causal discovery of meaningful models from robot sensor data.
From Continual Learning to Causal Discovery in Robotics
Jan 10, 2023
Reconstructing accurate causal models of dynamic systems from time-series of sensor data is a key problem in many real-world scenarios. In this paper, we present an overview based on our experience about practical challenges that the causal analysis encounters when applied to autonomous robots and how Continual Learning~(CL) could help to overcome them. We propose a possible way to leverage the CL paradigm to make causal discovery feasible for robotics applications where the computational resources are limited, while at the same time exploiting the robot as an active agent that helps to increase the quality of the reconstructed causal models.