Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Continual Learning to Causal Discovery in Robotics
Paper and Code
Jan 10, 2023
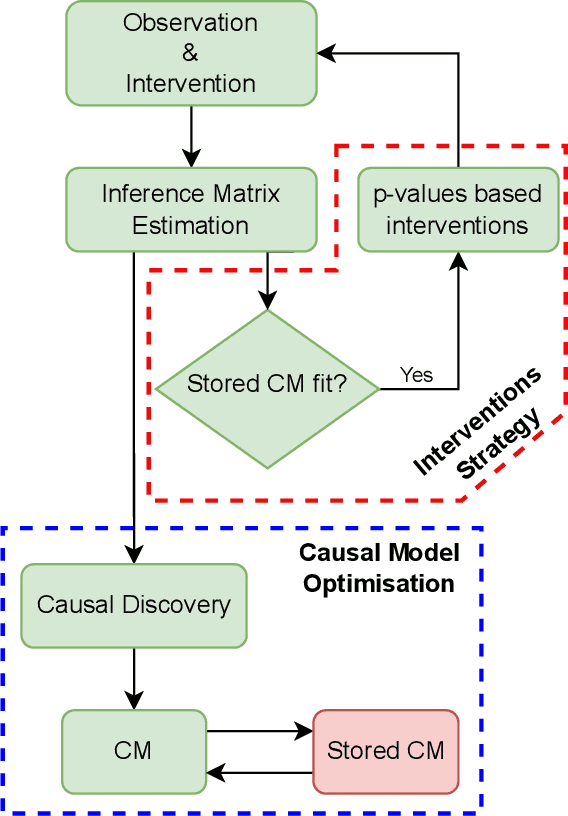
Reconstructing accurate causal models of dynamic systems from time-series of sensor data is a key problem in many real-world scenarios. In this paper, we present an overview based on our experience about practical challenges that the causal analysis encounters when applied to autonomous robots and how Continual Learning~(CL) could help to overcome them. We propose a possible way to leverage the CL paradigm to make causal discovery feasible for robotics applications where the computational resources are limited, while at the same time exploiting the robot as an active agent that helps to increase the quality of the reconstructed causal models.
* Accepted by AAAI-23 Bridge Program on Continual Causality
View paper on
 OpenReview
OpenReview