 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePathologist-like explainable AI for interpretable Gleason grading in prostate cancer
Oct 19, 2024



The aggressiveness of prostate cancer, the most common cancer in men worldwide, is primarily assessed based on histopathological data using the Gleason scoring system. While artificial intelligence (AI) has shown promise in accurately predicting Gleason scores, these predictions often lack inherent explainability, potentially leading to distrust in human-machine interactions. To address this issue, we introduce a novel dataset of 1,015 tissue microarray core images, annotated by an international group of 54 pathologists. The annotations provide detailed localized pattern descriptions for Gleason grading in line with international guidelines. Utilizing this dataset, we develop an inherently explainable AI system based on a U-Net architecture that provides predictions leveraging pathologists' terminology. This approach circumvents post-hoc explainability methods while maintaining or exceeding the performance of methods trained directly for Gleason pattern segmentation (Dice score: 0.713 $\pm$ 0.003 trained on explanations vs. 0.691 $\pm$ 0.010 trained on Gleason patterns). By employing soft labels during training, we capture the intrinsic uncertainty in the data, yielding strong results in Gleason pattern segmentation even in the context of high interobserver variability. With the release of this dataset, we aim to encourage further research into segmentation in medical tasks with high levels of subjectivity and to advance the understanding of pathologists' reasoning processes.
Ascento: A Two-Wheeled Jumping Robot
May 23, 2020
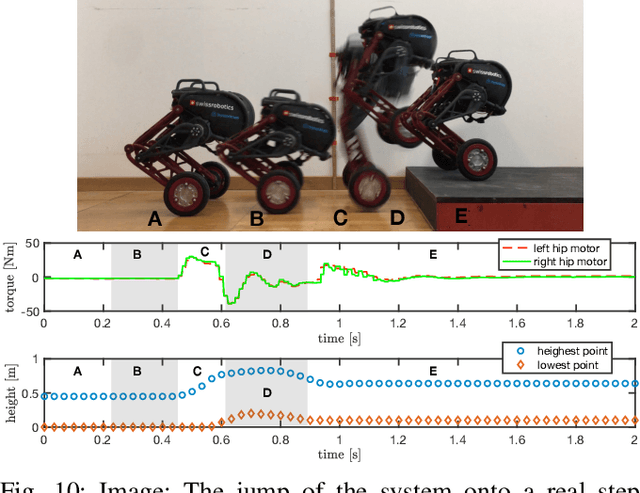
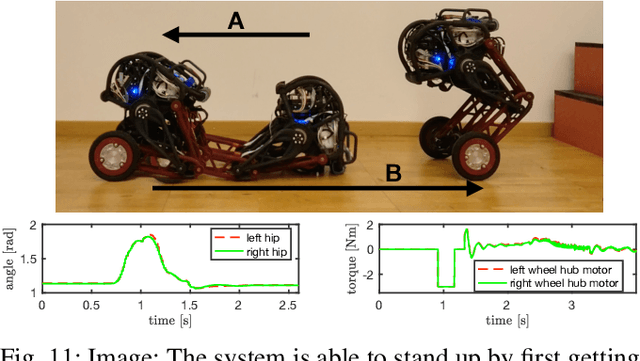
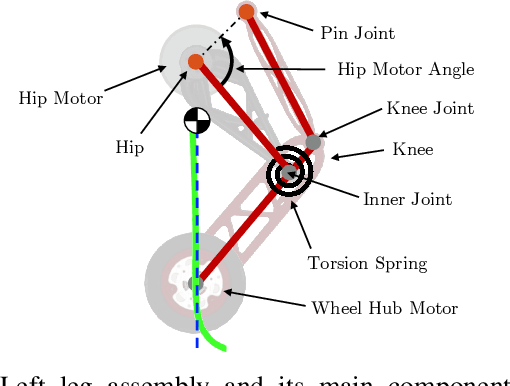
Applications of mobile ground robots demand high speed and agility while navigating in complex indoor environments. These present an ongoing challenge in mobile robotics. A system with these specifications would be of great use for a wide range of indoor inspection tasks. This paper introduces Ascento, a compact wheeled bipedal robot that is able to move quickly on flat terrain, and to overcome obstacles by jumping. The mechanical design and overall architecture of the system is presented, as well as the development of various controllers for different scenarios. A series of experiments with the final prototype system validate these behaviors in realistic scenarios.
* 7 pages, 11 Figures, ICRA 2019
Pedestrian Models for Autonomous Driving Part II: high level models of human behaviour
Mar 26, 2020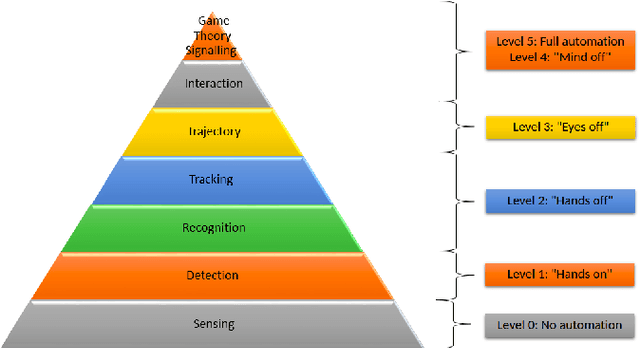

Autonomous vehicles (AVs) must share space with human pedestrians, both in on-road cases such as cars at pedestrian crossings and off-road cases such as delivery vehicles navigating through crowds on high-streets. Unlike static and kinematic obstacles, pedestrians are active agents with complex, interactive motions. Planning AV actions in the presence of pedestrians thus requires modelling of their probable future behaviour as well as detection and tracking which enable such modelling. This narrative review article is Part II of a pair which together survey the current technology stack involved in this process, organising recent research into a hierarchical taxonomy ranging from low level image detection to high-level psychological models, from the perspective of an AV designer. This self-contained Part II covers the higher levels of this stack, consisting of models of pedestrian behaviour, from prediction of individual pedestrians' likely destinations and paths, to game theoretic models of interactions between pedestrians and autonomous vehicles. This survey clearly shows that, although there are good models for optimal walking behaviour, high-level psychological and social modelling of pedestrian behaviour still remains an open research question that requires many conceptual issues to be clarified by the community. At these levels, early work has been done on descriptive and qualitative models of behaviour, but much work is still needed to translate them into quantitative algorithms for practical AV control.