 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRO: Doppler-Aware Direct Radar Odometry
Apr 29, 2025A renaissance in radar-based sensing for mobile robotic applications is underway. Compared to cameras or lidars, millimetre-wave radars have the ability to `see' through thin walls, vegetation, and adversarial weather conditions such as heavy rain, fog, snow, and dust. In this paper, we propose a novel SE(2) odometry approach for spinning frequency-modulated continuous-wave radars. Our method performs scan-to-local-map registration of the incoming radar data in a direct manner using all the radar intensity information without the need for feature or point cloud extraction. The method performs locally continuous trajectory estimation and accounts for both motion and Doppler distortion of the radar scans. If the radar possesses a specific frequency modulation pattern that makes radial Doppler velocities observable, an additional Doppler-based constraint is formulated to improve the velocity estimate and enable odometry in geometrically feature-deprived scenarios (e.g., featureless tunnels). Our method has been validated on over 250km of on-road data sourced from public datasets (Boreas and MulRan) and collected using our automotive platform. With the aid of a gyroscope, it outperforms state-of-the-art methods and achieves an average relative translation error of 0.26% on the Boreas leaderboard. When using data with the appropriate Doppler-enabling frequency modulation pattern, the translation error is reduced to 0.18% in similar environments. We also benchmarked our algorithm using 1.5 hours of data collected with a mobile robot in off-road environments with various levels of structure to demonstrate its versatility. Our real-time implementation is publicly available: https://github.com/utiasASRL/dro.
KISS-SLAM: A Simple, Robust, and Accurate 3D LiDAR SLAM System With Enhanced Generalization Capabilities
Mar 16, 2025



Robust and accurate localization and mapping of an environment using laser scanners, so-called LiDAR SLAM, is essential to many robotic applications. Early 3D LiDAR SLAM methods often exploited additional information from IMU or GNSS sensors to enhance localization accuracy and mitigate drift. Later, advanced systems further improved the estimation at the cost of a higher runtime and complexity. This paper explores the limits of what can be achieved with a LiDAR-only SLAM approach while following the "Keep It Small and Simple" (KISS) principle. By leveraging this minimalistic design principle, our system, KISS-SLAM, archives state-of-the-art performances in pose accuracy while requiring little to no parameter tuning for deployment across diverse environments, sensors, and motion profiles. We follow best practices in graph-based SLAM and build upon LiDAR odometry to compute the relative motion between scans and construct local maps of the environment. To correct drift, we match local maps and optimize the trajectory in a pose graph optimization step. The experimental results demonstrate that this design achieves competitive performance while reducing complexity and reliance on additional sensor modalities. By prioritizing simplicity, this work provides a new strong baseline for LiDAR-only SLAM and a high-performing starting point for future research. Further, our pipeline builds consistent maps that can be used directly for further downstream tasks like navigation. Our open-source system operates faster than the sensor frame rate in all presented datasets and is designed for real-world scenarios.
MAD-BA: 3D LiDAR Bundle Adjustment -- from Uncertainty Modelling to Structure Optimization
Jan 07, 2025



The joint optimization of sensor poses and 3D structure is fundamental for state estimation in robotics and related fields. Current LiDAR systems often prioritize pose optimization, with structure refinement either omitted or treated separately using representations like signed distance functions or neural networks. This paper introduces a framework for simultaneous optimization of sensor poses and 3D map, represented as surfels. A generalized LiDAR uncertainty model is proposed to address degraded or less reliable measurements in varying scenarios. Experimental results on public datasets demonstrate improved performance over most comparable state-of-the-art methods. The system is provided as open-source software to support further research.
Learning Where to Look: Self-supervised Viewpoint Selection for Active Localization using Geometrical Information
Jul 22, 2024



Accurate localization in diverse environments is a fundamental challenge in computer vision and robotics. The task involves determining a sensor's precise position and orientation, typically a camera, within a given space. Traditional localization methods often rely on passive sensing, which may struggle in scenarios with limited features or dynamic environments. In response, this paper explores the domain of active localization, emphasizing the importance of viewpoint selection to enhance localization accuracy. Our contributions involve using a data-driven approach with a simple architecture designed for real-time operation, a self-supervised data training method, and the capability to consistently integrate our map into a planning framework tailored for real-world robotics applications. Our results demonstrate that our method performs better than the existing one, targeting similar problems and generalizing on synthetic and real data. We also release an open-source implementation to benefit the community.
MAD-ICP: It Is All About Matching Data -- Robust and Informed LiDAR Odometry
May 09, 2024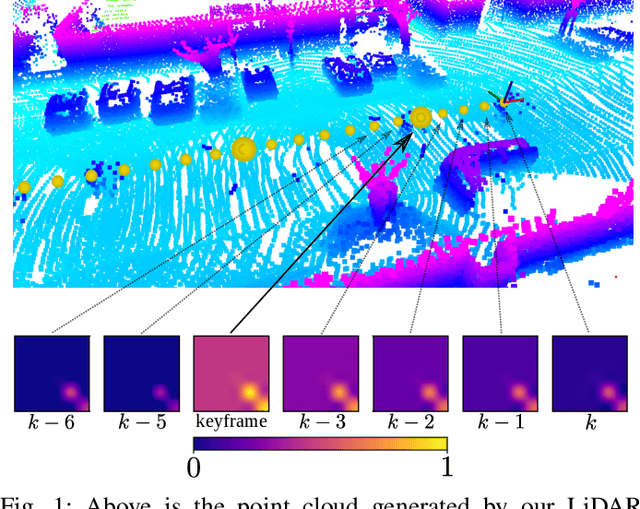



LiDAR odometry is the task of estimating the ego-motion of the sensor from sequential laser scans. This problem has been addressed by the community for more than two decades, and many effective solutions are available nowadays. Most of these systems implicitly rely on assumptions about the operating environment, the sensor used, and motion pattern. When these assumptions are violated, several well-known systems tend to perform poorly. This paper presents a LiDAR odometry system that can overcome these limitations and operate well under different operating conditions while achieving performance comparable with domain-specific methods. Our algorithm follows the well-known ICP paradigm that leverages a PCA-based kd-tree implementation that is used to extract structural information about the clouds being registered and to compute the minimization metric for the alignment. The drift is bound by managing the local map based on the estimated uncertainty of the tracked pose. To benefit the community, we release an open-source C++ anytime real-time implementation.
VBR: A Vision Benchmark in Rome
Apr 17, 2024



This paper presents a vision and perception research dataset collected in Rome, featuring RGB data, 3D point clouds, IMU, and GPS data. We introduce a new benchmark targeting visual odometry and SLAM, to advance the research in autonomous robotics and computer vision. This work complements existing datasets by simultaneously addressing several issues, such as environment diversity, motion patterns, and sensor frequency. It uses up-to-date devices and presents effective procedures to accurately calibrate the intrinsic and extrinsic of the sensors while addressing temporal synchronization. During recording, we cover multi-floor buildings, gardens, urban and highway scenarios. Combining handheld and car-based data collections, our setup can simulate any robot (quadrupeds, quadrotors, autonomous vehicles). The dataset includes an accurate 6-dof ground truth based on a novel methodology that refines the RTK-GPS estimate with LiDAR point clouds through Bundle Adjustment. All sequences divided in training and testing are accessible through our website.
Ca$^2$Lib: Simple and Accurate LiDAR-RGB Calibration using Small Common Markers
Sep 14, 2023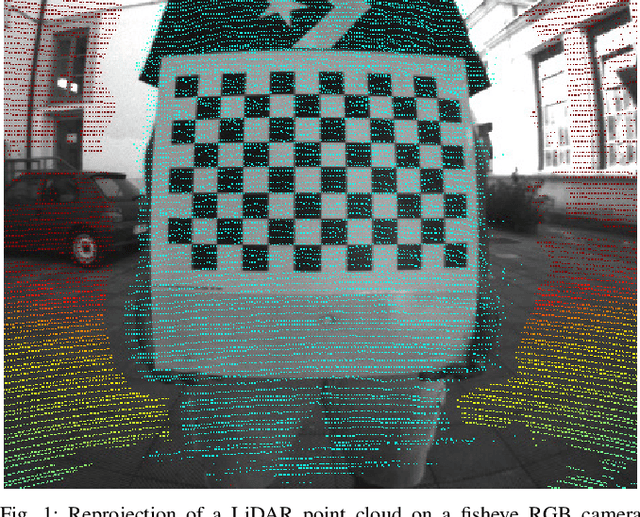


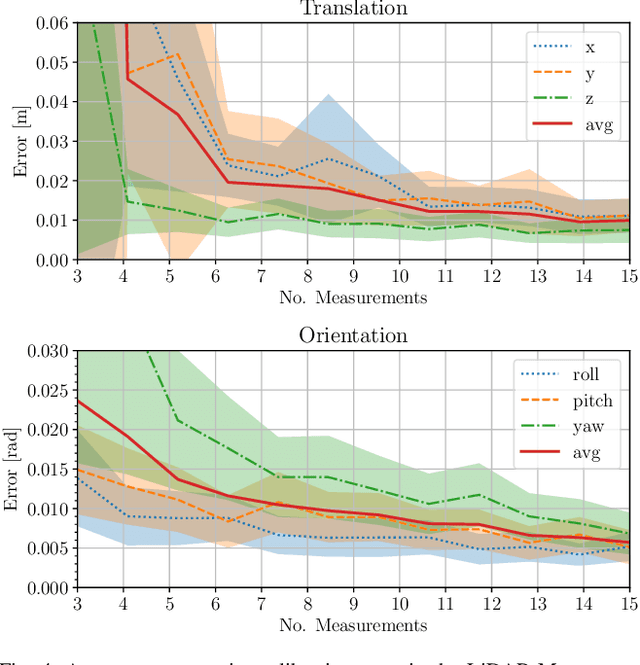
In many fields of robotics, knowing the relative position and orientation between two sensors is a mandatory precondition to operate with multiple sensing modalities. In this context, the pair LiDAR-RGB cameras offer complementary features: LiDARs yield sparse high quality range measurements, while RGB cameras provide a dense color measurement of the environment. Existing techniques often rely either on complex calibration targets that are expensive to obtain, or extracted virtual correspondences that can hinder the estimate's accuracy. In this paper we address the problem of LiDAR-RGB calibration using typical calibration patterns (i.e. A3 chessboard) with minimal human intervention. Our approach exploits the planarity of the target to find correspondences between the sensors measurements, leading to features that are robust to LiDAR noise. Moreover, we estimate a solution by solving a joint non-linear optimization problem. We validated our approach by carrying on quantitative and comparative experiments with other state-of-the-art approaches. Our results show that our simple schema performs on par or better than other approches using complex calibration targets. Finally, we release an open-source C++ implementation at \url{https://github.com/srrg-sapienza/ca2lib}
How-to Augmented Lagrangian on Factor Graphs
Aug 10, 2023



Factor graphs are a very powerful graphical representation, used to model many problems in robotics. They are widely spread in the areas of Simultaneous Localization and Mapping (SLAM), computer vision, and localization. In this paper we describe an approach to fill the gap with other areas, such as optimal control, by presenting an extension of Factor Graph Solvers to constrained optimization. The core idea of our method is to encapsulate the Augmented Lagrangian (AL) method in factors of the graph that can be integrated straightforwardly in existing factor graph solvers. We show the generality of our approach by addressing three applications, arising from different areas: pose estimation, rotation synchronization and Model Predictive Control (MPC) of a pseudo-omnidirectional platform. We implemented our approach using C++ and ROS. Besides the generality of the approach, application results show that we can favorably compare against domain specific approaches.
Photometric LiDAR and RGB-D Bundle Adjustment
Mar 29, 2023



The joint optimization of the sensor trajectory and 3D map is a crucial characteristic of Simultaneous Localization and Mapping (SLAM) systems. To achieve this, the gold standard is Bundle Adjustment (BA). Modern 3D LiDARs now retain higher resolutions that enable the creation of point cloud images resembling those taken by conventional cameras. Nevertheless, the typical effective global refinement techniques employed for RGB-D sensors are not widely applied to LiDARs. This paper presents a novel BA photometric strategy that accounts for both RGB-D and LiDAR in the same way. Our work can be used on top of any SLAM/GNSS estimate to improve and refine the initial trajectory. We conducted different experiments using these two depth sensors on public benchmarks. Our results show that our system performs on par or better compared to other state-of-the-art ad-hoc SLAM/BA strategies, free from data association and without making assumptions about the environment. In addition, we present the benefit of jointly using RGB-D and LiDAR within our unified method. We finally release an open-source CUDA/C++ implementation.
On Domain-Specific Pre-Training for Effective Semantic Perception in Agricultural Robotics
Mar 22, 2023



Agricultural robots have the prospect to enable more efficient and sustainable agricultural production of food, feed, and fiber. Perception of crops and weeds is a central component of agricultural robots that aim to monitor fields and assess the plants as well as their growth stage in an automatic manner. Semantic perception mostly relies on deep learning using supervised approaches, which require time and qualified workers to label fairly large amounts of data. In this paper, we look into the problem of reducing the amount of labels without compromising the final segmentation performance. For robots operating in the field, pre-training networks in a supervised way is already a popular method to reduce the number of required labeled images. We investigate the possibility of pre-training in a self-supervised fashion using data from the target domain. To better exploit this data, we propose a set of domain-specific augmentation strategies. We evaluate our pre-training on semantic segmentation and leaf instance segmentation, two important tasks in our domain. The experimental results suggest that pre-training with domain-specific data paired with our data augmentation strategy leads to superior performance compared to commonly used pre-trainings. Furthermore, the pre-trained networks obtain similar performance to the fully supervised with less labeled data.