 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRO: Doppler-Aware Direct Radar Odometry
Apr 29, 2025A renaissance in radar-based sensing for mobile robotic applications is underway. Compared to cameras or lidars, millimetre-wave radars have the ability to `see' through thin walls, vegetation, and adversarial weather conditions such as heavy rain, fog, snow, and dust. In this paper, we propose a novel SE(2) odometry approach for spinning frequency-modulated continuous-wave radars. Our method performs scan-to-local-map registration of the incoming radar data in a direct manner using all the radar intensity information without the need for feature or point cloud extraction. The method performs locally continuous trajectory estimation and accounts for both motion and Doppler distortion of the radar scans. If the radar possesses a specific frequency modulation pattern that makes radial Doppler velocities observable, an additional Doppler-based constraint is formulated to improve the velocity estimate and enable odometry in geometrically feature-deprived scenarios (e.g., featureless tunnels). Our method has been validated on over 250km of on-road data sourced from public datasets (Boreas and MulRan) and collected using our automotive platform. With the aid of a gyroscope, it outperforms state-of-the-art methods and achieves an average relative translation error of 0.26% on the Boreas leaderboard. When using data with the appropriate Doppler-enabling frequency modulation pattern, the translation error is reduced to 0.18% in similar environments. We also benchmarked our algorithm using 1.5 hours of data collected with a mobile robot in off-road environments with various levels of structure to demonstrate its versatility. Our real-time implementation is publicly available: https://github.com/utiasASRL/dro.
MAD-ICP: It Is All About Matching Data -- Robust and Informed LiDAR Odometry
May 09, 2024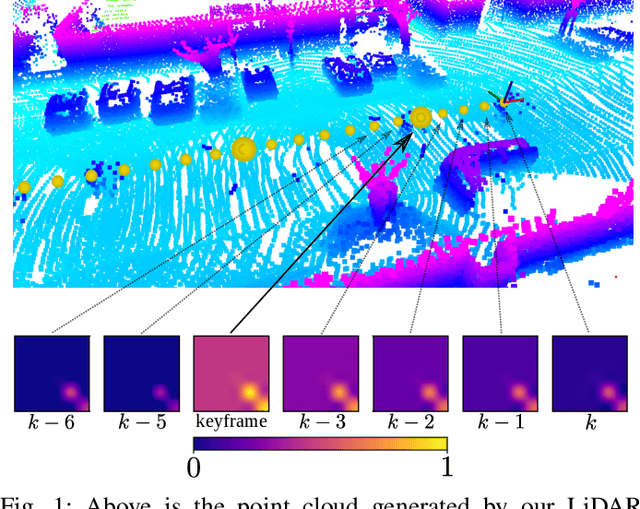



LiDAR odometry is the task of estimating the ego-motion of the sensor from sequential laser scans. This problem has been addressed by the community for more than two decades, and many effective solutions are available nowadays. Most of these systems implicitly rely on assumptions about the operating environment, the sensor used, and motion pattern. When these assumptions are violated, several well-known systems tend to perform poorly. This paper presents a LiDAR odometry system that can overcome these limitations and operate well under different operating conditions while achieving performance comparable with domain-specific methods. Our algorithm follows the well-known ICP paradigm that leverages a PCA-based kd-tree implementation that is used to extract structural information about the clouds being registered and to compute the minimization metric for the alignment. The drift is bound by managing the local map based on the estimated uncertainty of the tracked pose. To benefit the community, we release an open-source C++ anytime real-time implementation.
VBR: A Vision Benchmark in Rome
Apr 17, 2024



This paper presents a vision and perception research dataset collected in Rome, featuring RGB data, 3D point clouds, IMU, and GPS data. We introduce a new benchmark targeting visual odometry and SLAM, to advance the research in autonomous robotics and computer vision. This work complements existing datasets by simultaneously addressing several issues, such as environment diversity, motion patterns, and sensor frequency. It uses up-to-date devices and presents effective procedures to accurately calibrate the intrinsic and extrinsic of the sensors while addressing temporal synchronization. During recording, we cover multi-floor buildings, gardens, urban and highway scenarios. Combining handheld and car-based data collections, our setup can simulate any robot (quadrupeds, quadrotors, autonomous vehicles). The dataset includes an accurate 6-dof ground truth based on a novel methodology that refines the RTK-GPS estimate with LiDAR point clouds through Bundle Adjustment. All sequences divided in training and testing are accessible through our website.
Ca$^2$Lib: Simple and Accurate LiDAR-RGB Calibration using Small Common Markers
Sep 14, 2023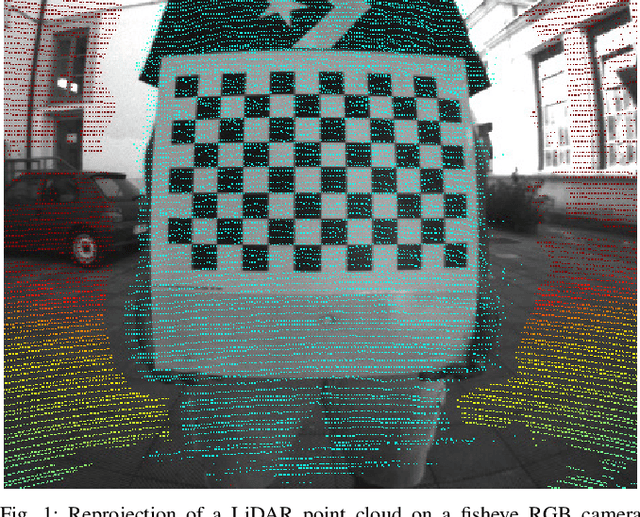


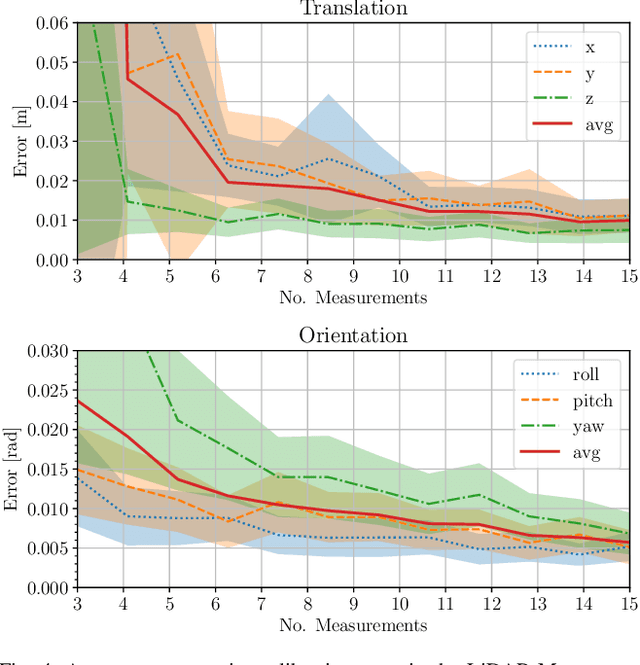
In many fields of robotics, knowing the relative position and orientation between two sensors is a mandatory precondition to operate with multiple sensing modalities. In this context, the pair LiDAR-RGB cameras offer complementary features: LiDARs yield sparse high quality range measurements, while RGB cameras provide a dense color measurement of the environment. Existing techniques often rely either on complex calibration targets that are expensive to obtain, or extracted virtual correspondences that can hinder the estimate's accuracy. In this paper we address the problem of LiDAR-RGB calibration using typical calibration patterns (i.e. A3 chessboard) with minimal human intervention. Our approach exploits the planarity of the target to find correspondences between the sensors measurements, leading to features that are robust to LiDAR noise. Moreover, we estimate a solution by solving a joint non-linear optimization problem. We validated our approach by carrying on quantitative and comparative experiments with other state-of-the-art approaches. Our results show that our simple schema performs on par or better than other approches using complex calibration targets. Finally, we release an open-source C++ implementation at \url{https://github.com/srrg-sapienza/ca2lib}
Photometric LiDAR and RGB-D Bundle Adjustment
Mar 29, 2023



The joint optimization of the sensor trajectory and 3D map is a crucial characteristic of Simultaneous Localization and Mapping (SLAM) systems. To achieve this, the gold standard is Bundle Adjustment (BA). Modern 3D LiDARs now retain higher resolutions that enable the creation of point cloud images resembling those taken by conventional cameras. Nevertheless, the typical effective global refinement techniques employed for RGB-D sensors are not widely applied to LiDARs. This paper presents a novel BA photometric strategy that accounts for both RGB-D and LiDAR in the same way. Our work can be used on top of any SLAM/GNSS estimate to improve and refine the initial trajectory. We conducted different experiments using these two depth sensors on public benchmarks. Our results show that our system performs on par or better compared to other state-of-the-art ad-hoc SLAM/BA strategies, free from data association and without making assumptions about the environment. In addition, we present the benefit of jointly using RGB-D and LiDAR within our unified method. We finally release an open-source CUDA/C++ implementation.
Low Frequency Spinning LiDAR De-Skewing
Mar 13, 2023Most commercially available Light Detection and Ranging (LiDAR)s measure the distances along a 2D section of the environment by sequentially sampling the free range along directions centered at the sensor's origin. When the sensor moves during the acquisition, the measured ranges are affected by a phenomenon known as skewing, which appears as a distortion in the acquired scan. Skewing potentially affects all systems that rely on LiDAR data, however it could be compensated if the position of the sensor were known each time a single range is measured. Most methods to de-skew a LiDAR are based on external sensors such as IMU or wheel odometry, to estimate these intermediate LiDAR positions. In this paper we present a method that relies exclusively on range measurements to effectively estimate the robot velocities which are then used for de-skewing. Our approach is suitable for low frequency LiDAR where the skewing is more evident. It can be seamlessly integrated into existing pipelines, enhancing their performance at negligible computational cost. We validated the proposed method with statistical experiments characterizing different operating conditions
MD-SLAM: Multi-cue Direct SLAM
Mar 24, 2022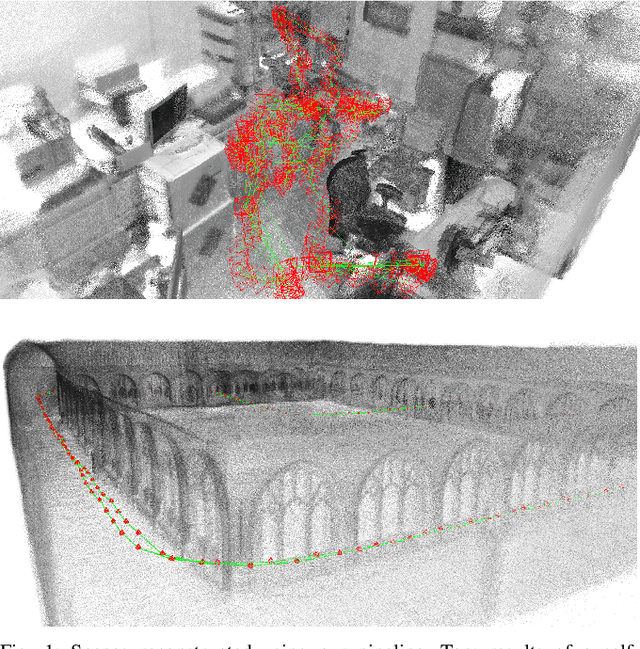
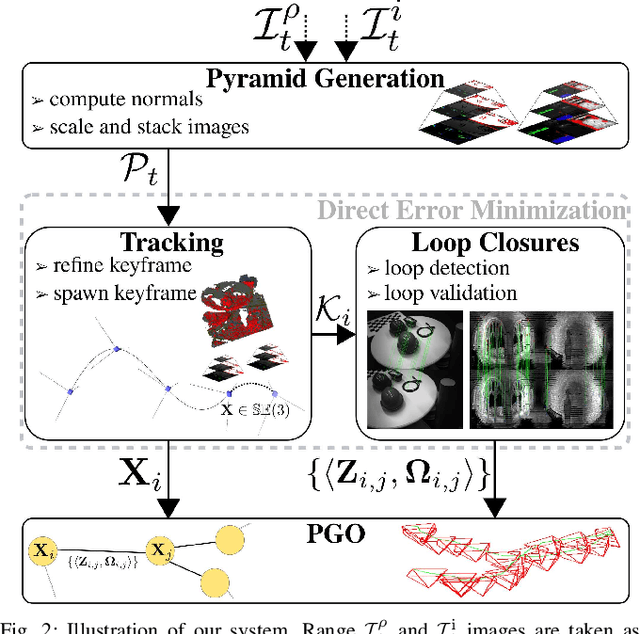
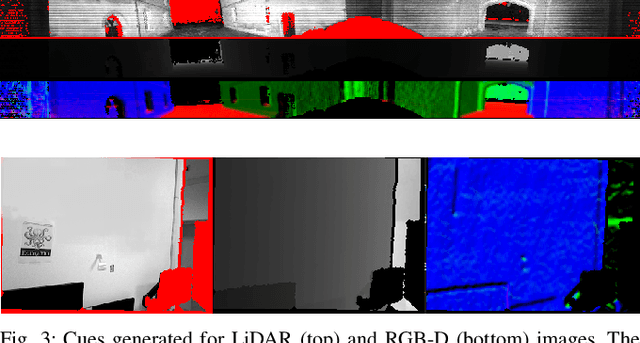

Simultaneous Localization and Mapping (SLAM) systems are fundamental building blocks for any autonomous robot navigating in unknown environments. The SLAM implementation heavily depends on the sensor modality employed on the mobile platform. For this reason, assumptions on the scene's structure are often made to maximize estimation accuracy. This paper presents a novel direct 3D SLAM pipeline that works independently for RGB-D and LiDAR sensors. Building upon prior work on multi-cue photometric frame-to-frame alignment, our proposed approach provides an easy-to-extend and generic SLAM system. Our pipeline requires only minor adaptations within the projection model to handle different sensor modalities. We couple a position tracking system with an appearance-based relocalization mechanism that handles large loop closures. Loop closures are validated by the same direct registration algorithm used for odometry estimation. We present comparative experiments with state-of-the-art approaches on publicly available benchmarks using RGB-D cameras and 3D LiDARs. Our system performs well in heterogeneous datasets compared to other sensor-specific methods while making no assumptions about the environment. Finally, we release an open-source C++ implementation of our system.