 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBreaking Time: A Fully Gaussian Framework for Distributed and Continuous-Time SLAM
Jun 04, 2026Continuous-time SLAM provides a principled framework for fusing heterogeneous sensors while estimating smooth trajectories, and is particularly well-suited for handling heterogeneous, asynchronous sensor streams with non-uniform readout patterns, such as rolling shutter cameras, LiDAR scanners, radar sweeps, or event-based sensors. In this work, we introduce G-solver, a fully Gaussian and distributed framework that combines Gaussian Belief Propagation (GBP) with Gaussian Process (GP) motion priors for continuous-time trajectory estimation. Our GP model provides a probabilistic representation of the trajectory, enabling consistent interpolation and the use of data-driven hyperparameters, while GBP offers a scalable message-passing formulation well-suited for decentralized settings. The resulting solver naturally extends to multi-camera scenarios without specialized synchronization or engineering effort. We evaluate the approach on synthetic and real data, including rolling shutter and distributed multi-camera optimization, demonstrating accurate and stable estimation with runtimes comparable to existing continuous-time methods. An open-source implementation is released.
MAD-BA: 3D LiDAR Bundle Adjustment -- from Uncertainty Modelling to Structure Optimization
Jan 07, 2025



The joint optimization of sensor poses and 3D structure is fundamental for state estimation in robotics and related fields. Current LiDAR systems often prioritize pose optimization, with structure refinement either omitted or treated separately using representations like signed distance functions or neural networks. This paper introduces a framework for simultaneous optimization of sensor poses and 3D map, represented as surfels. A generalized LiDAR uncertainty model is proposed to address degraded or less reliable measurements in varying scenarios. Experimental results on public datasets demonstrate improved performance over most comparable state-of-the-art methods. The system is provided as open-source software to support further research.
MAD-ICP: It Is All About Matching Data -- Robust and Informed LiDAR Odometry
May 09, 2024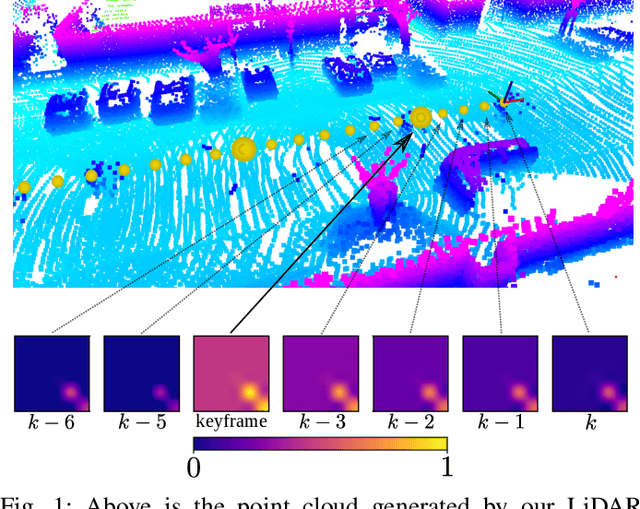



LiDAR odometry is the task of estimating the ego-motion of the sensor from sequential laser scans. This problem has been addressed by the community for more than two decades, and many effective solutions are available nowadays. Most of these systems implicitly rely on assumptions about the operating environment, the sensor used, and motion pattern. When these assumptions are violated, several well-known systems tend to perform poorly. This paper presents a LiDAR odometry system that can overcome these limitations and operate well under different operating conditions while achieving performance comparable with domain-specific methods. Our algorithm follows the well-known ICP paradigm that leverages a PCA-based kd-tree implementation that is used to extract structural information about the clouds being registered and to compute the minimization metric for the alignment. The drift is bound by managing the local map based on the estimated uncertainty of the tracked pose. To benefit the community, we release an open-source C++ anytime real-time implementation.
VBR: A Vision Benchmark in Rome
Apr 17, 2024



This paper presents a vision and perception research dataset collected in Rome, featuring RGB data, 3D point clouds, IMU, and GPS data. We introduce a new benchmark targeting visual odometry and SLAM, to advance the research in autonomous robotics and computer vision. This work complements existing datasets by simultaneously addressing several issues, such as environment diversity, motion patterns, and sensor frequency. It uses up-to-date devices and presents effective procedures to accurately calibrate the intrinsic and extrinsic of the sensors while addressing temporal synchronization. During recording, we cover multi-floor buildings, gardens, urban and highway scenarios. Combining handheld and car-based data collections, our setup can simulate any robot (quadrupeds, quadrotors, autonomous vehicles). The dataset includes an accurate 6-dof ground truth based on a novel methodology that refines the RTK-GPS estimate with LiDAR point clouds through Bundle Adjustment. All sequences divided in training and testing are accessible through our website.