 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRO: Doppler-Aware Direct Radar Odometry
Apr 29, 2025A renaissance in radar-based sensing for mobile robotic applications is underway. Compared to cameras or lidars, millimetre-wave radars have the ability to `see' through thin walls, vegetation, and adversarial weather conditions such as heavy rain, fog, snow, and dust. In this paper, we propose a novel SE(2) odometry approach for spinning frequency-modulated continuous-wave radars. Our method performs scan-to-local-map registration of the incoming radar data in a direct manner using all the radar intensity information without the need for feature or point cloud extraction. The method performs locally continuous trajectory estimation and accounts for both motion and Doppler distortion of the radar scans. If the radar possesses a specific frequency modulation pattern that makes radial Doppler velocities observable, an additional Doppler-based constraint is formulated to improve the velocity estimate and enable odometry in geometrically feature-deprived scenarios (e.g., featureless tunnels). Our method has been validated on over 250km of on-road data sourced from public datasets (Boreas and MulRan) and collected using our automotive platform. With the aid of a gyroscope, it outperforms state-of-the-art methods and achieves an average relative translation error of 0.26% on the Boreas leaderboard. When using data with the appropriate Doppler-enabling frequency modulation pattern, the translation error is reduced to 0.18% in similar environments. We also benchmarked our algorithm using 1.5 hours of data collected with a mobile robot in off-road environments with various levels of structure to demonstrate its versatility. Our real-time implementation is publicly available: https://github.com/utiasASRL/dro.
RaSCL: Radar to Satellite Crossview Localization
Apr 22, 2025GNSS is unreliable, inaccurate, and insufficient in many real-time autonomous field applications. In this work, we present a GNSS-free global localization solution that contains a method of registering imaging radar on the ground with overhead RGB imagery, with joint optimization of relative poses from odometry and global poses from our overhead registration. Previous works have used various combinations of ground sensors and overhead imagery, and different feature extraction and matching methods. These include various handcrafted and deep-learning-based methods for extracting features from overhead imagery. Our work presents insights on extracting essential features from RGB overhead images for effective global localization against overhead imagery using only ground radar and a single georeferenced initial guess. We motivate our method by evaluating it on datasets in diverse geographic conditions and robotic platforms, including on an Unmanned Surface Vessel (USV) as well as urban and suburban driving datasets.
Radar Teach and Repeat: Architecture and Initial Field Testing
Sep 16, 2024



Frequency-modulated continuous-wave (FMCW) scanning radar has emerged as an alternative to spinning LiDAR for state estimation on mobile robots. Radar's longer wavelength is less affected by small particulates, providing operational advantages in challenging environments such as dust, smoke, and fog. This paper presents Radar Teach and Repeat (RT&R): a full-stack radar system for long-term off-road robot autonomy. RT&R can drive routes reliably in off-road cluttered areas without any GPS. We benchmark the radar system's closed-loop path-tracking performance and compare it to its 3D LiDAR counterpart. 11.8 km of autonomous driving was completed without interventions using only radar and gyro for navigation. RT&R was evaluated on different routes with progressively less structured scene geometry. RT&R achieved lateral path-tracking root mean squared errors (RMSE) of 5.6 cm, 7.5 cm, and 12.1 cm as the routes became more challenging. On the robot we used for testing, these RMSE values are less than half of the width of one tire (24 cm). These same routes have worst-case errors of 21.7 cm, 24.0 cm, and 43.8 cm. We conclude that radar is a viable alternative to LiDAR for long-term autonomy in challenging off-road scenarios. The implementation of RT&R is open-source and available at: https://github.com/utiasASRL/vtr3.
FoMo: A Proposal for a Multi-Season Dataset for Robot Navigation in Forêt Montmorency
Apr 19, 2024In this paper, we propose the FoMo (For\^et Montmorency) dataset: a comprehensive, multi-season data collection. Located in the Montmorency Forest, Quebec, Canada, our dataset will capture a rich variety of sensory data over six distinct trajectories totaling 6 kilometers, repeated through different seasons to accumulate 42 kilometers of recorded data. The boreal forest environment increases the diversity of datasets for mobile robot navigation. This proposed dataset will feature a broad array of sensor modalities, including lidar, radar, and a navigation-grade Inertial Measurement Unit (IMU), against the backdrop of challenging boreal forest conditions. Notably, the FoMo dataset will be distinguished by its inclusion of seasonal variations, such as changes in tree canopy and snow depth up to 2 meters, presenting new challenges for robot navigation algorithms. Alongside, we will offer a centimeter-level accurate ground truth, obtained through Post Processed Kinematic (PPK) Global Navigation Satellite System (GNSS) correction, facilitating precise evaluation of odometry and localization algorithms. This work aims to spur advancements in autonomous navigation, enabling the development of robust algorithms capable of handling the dynamic, unstructured environments characteristic of boreal forests. With a public odometry and localization leaderboard and a dedicated software suite, we invite the robotics community to engage with the FoMo dataset by exploring new frontiers in robot navigation under extreme environmental variations. We seek feedback from the community based on this proposal to make the dataset as useful as possible. For further details and supplementary materials, please visit https://norlab-ulaval.github.io/FoMo-website/.
Uncertainty-aware Gaussian Mixture Model for UWB Time Difference of Arrival Localization in Cluttered Environments
Jul 31, 2023Ultra-wideband (UWB) time difference of arrival(TDOA)-based localization has emerged as a low-cost and scalable indoor positioning solution. However, in cluttered environments, the performance of UWB TDOA-based localization deteriorates due to the biased and non-Gaussian noise distributions induced by obstacles. In this work, we present a bi-level optimization-based joint localization and noise model learning algorithm to address this problem. In particular, we use a Gaussian mixture model (GMM) to approximate the measurement noise distribution. We explicitly incorporate the estimated state's uncertainty into the GMM noise model learning, referred to as uncertainty-aware GMM, to improve both noise modeling and localization performance. We first evaluate the GMM noise model learning and localization performance in numerous simulation scenarios. We then demonstrate the effectiveness of our algorithm in extensive real-world experiments using two different cluttered environments. We show that our algorithm provides accurate position estimates with low-cost UWB sensors, no prior knowledge about the obstacles in the space, and a significant amount of UWB radios occluded.
UTIL: An Ultra-wideband Time-difference-of-arrival Indoor Localization Dataset
Mar 28, 2022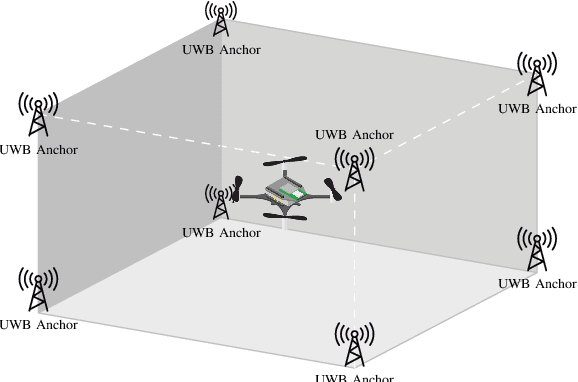
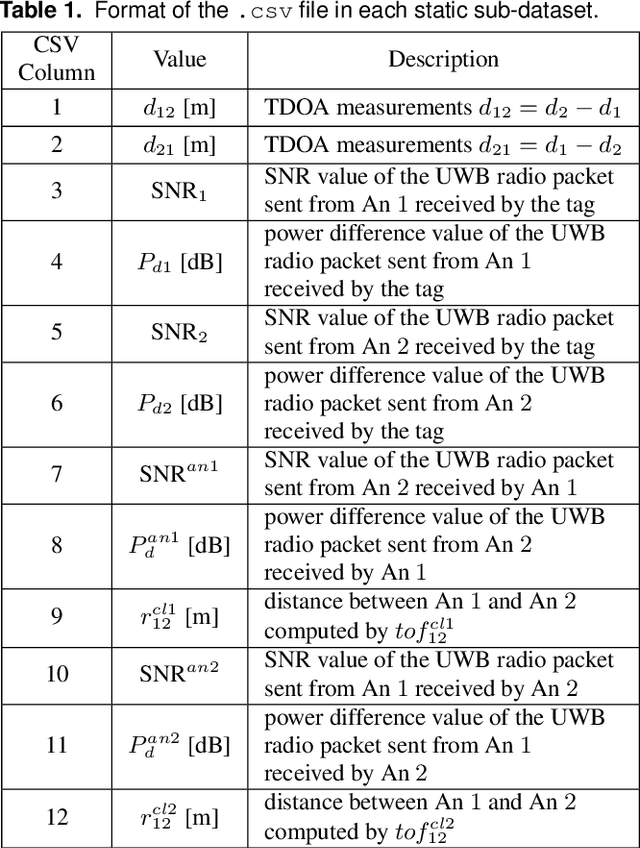


This paper presents an ultra-wideband (UWB) time-difference-of-arrival (TDOA) dataset collected from a quadrotor for research purposes. The dataset consists of low-level signal information from static experiments and UWB TDOA measurements and additional onboard sensor data from flight experiments on a quadrotor. The data collection process is discussed in detail, including the equipment used, measurement collection procedure, and the calibration of the quadrotor platform. All the data is made available as plain text files and we provide both Matlab and Python scripts to parse and analyze the data. We provide a thorough description of the data format and some pointers on the potential usage of each sub-dataset. The dataset is available for download at https://utiasdsl.github.io/util-uwb-dataset/. We hope this dataset will help researchers develop and compare reliable estimation methods for the emerging UWB TDOA-based indoor localization technology.